Inspiration
We saw the trash on the ground and it immediately prompts us to the topic of the environment and public health.
What it does
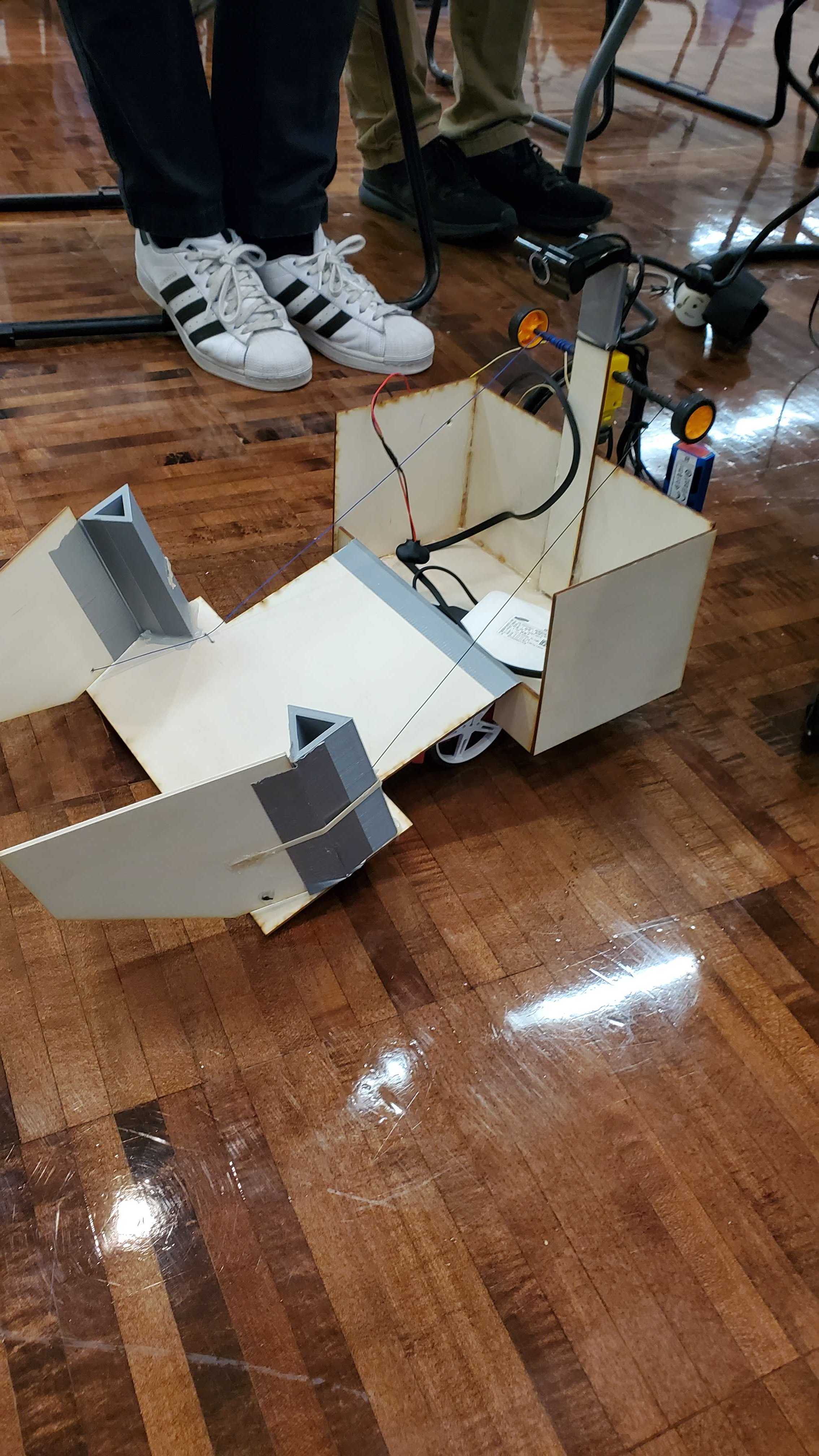
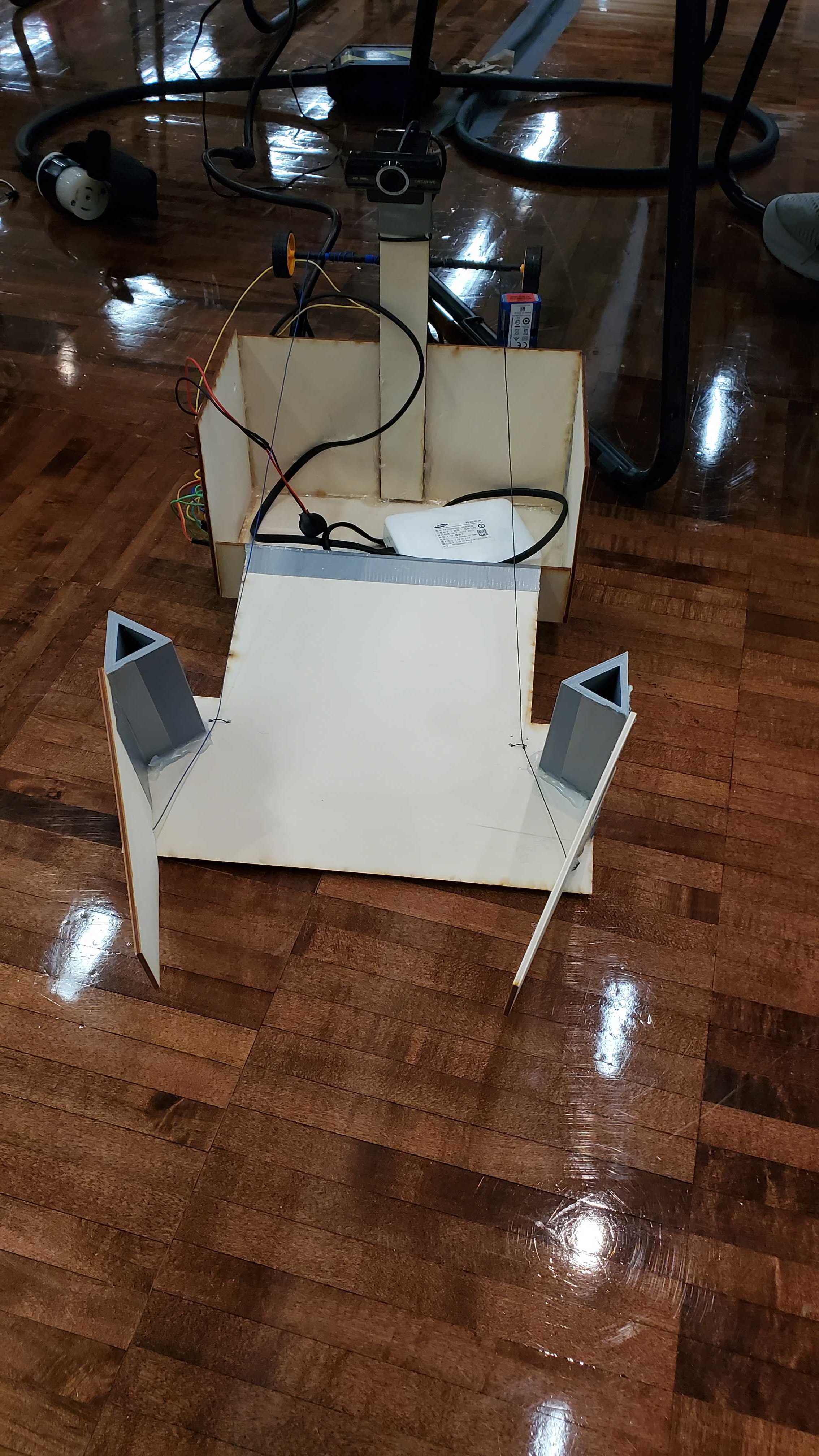
Our trash bot can look for and detect the nearby recyclable bottles. After there is a bottle detected, the bot will approach the bottle and pick up the bottle and dump into the carry-on trash bin.
How I built it
We used Linux operation system on Raspberry pi for the coding. We used python and the object detection algorithm from alwaysAI to detect the water bottle. We used TI Robotics System Learning Kit for the overall model of the robot. the To pick it up, we designed a system with a single motor with two strings to complete the task. Furthermore, we created a carry-on "trash bin" using 3d printing and laser cutting.
Challenges I ran into
Our first challenge is to find a less resource-demanding method to pick up trash for the robot. Later on, we couldn't get the dragonboard working and we ran into issues with the dependency on docker file for the alwaysAI algorithm. We also had trouble to fine-tune our algorithm to accurately detect the water bottle and act.
Accomplishments that I'm proud of
We built an autonomous trash with computer vision in 24 hours!
What I learned
CV, fast prototyping, communication, and teamwork!
What's next for Trash Bot
Our next mission for Trash Bot is to be capable of detecting an extensive variety of trash and to recycle them accordingly. Also we should add a post-detection algorithm so that the bot can follow the order remotely.
Built With
- alwaysai
- docker
- python
- raspberry-pi

Log in or sign up for Devpost to join the conversation.