Introduction:
Our project is based off a problem we encountered during Teenhacks 2014; a lack of trash cans near our work space. The trash cans that were here were too far away and required us to jump through obstacles including sleeping students and personal belongings in order to reach the closest trashcan too us. Our solution was to create a multi-functional robot (or Trash-Bot) to clean our messes up for us so that we would not have to walk through crowded isles.
Target Audience :
Our project is targeted toward crowded work spaces and those who don't have time to get up and throw there unwanted waste away. This can greatly improve work productivity and work ethnics.
What Makes Our Idea Stand Out:
Our idea interesting in the way that we can combine robotic engineering while making a fun way to pick up trash.
Have we done our homework you ask?
Have you done your homework? As previously stated, our project is based off a problem we encountered during Teenhacks: a lack of trashcans we have in our workplace. Looking at a larger scale, the world is filled with litter and waste that should actually be in a trash can. Now a days many people are lazy and would rather litter than throw their trash into a designated trash bin. However this device incorporates enjoyment of throwing trash into a trash bin.
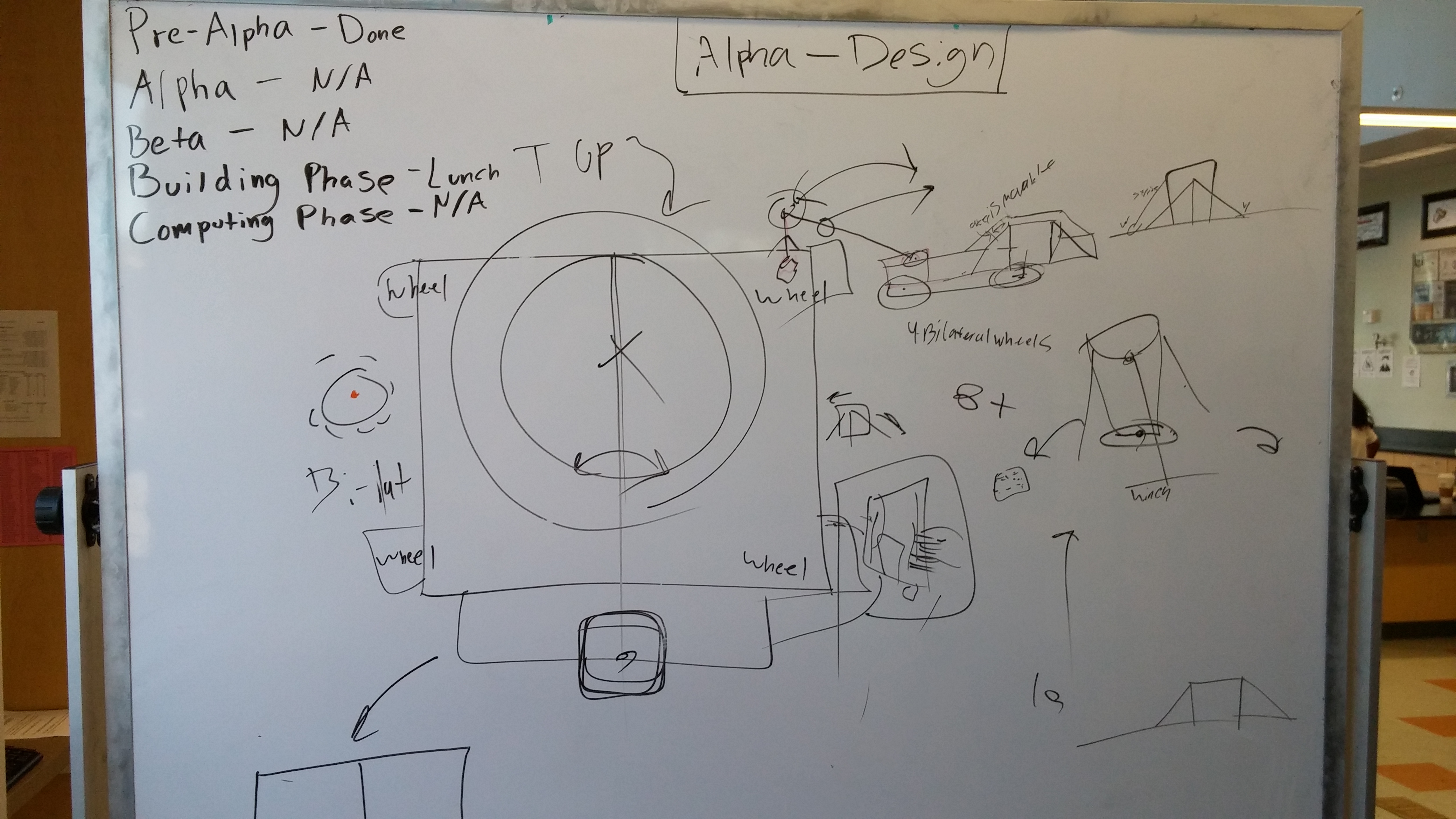
Our Design process included ~
Pre-Alpha Design Phase Alpha Design Phase Beta Design Phase Building Phase Computing Phase - N/A Testing Phase Complete Project
Built With
- code
- function
- hardware
- service

Log in or sign up for Devpost to join the conversation.