-
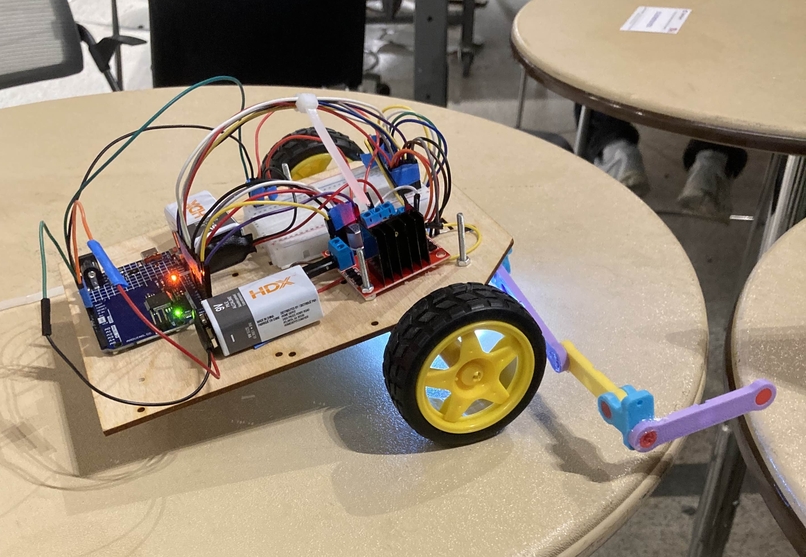
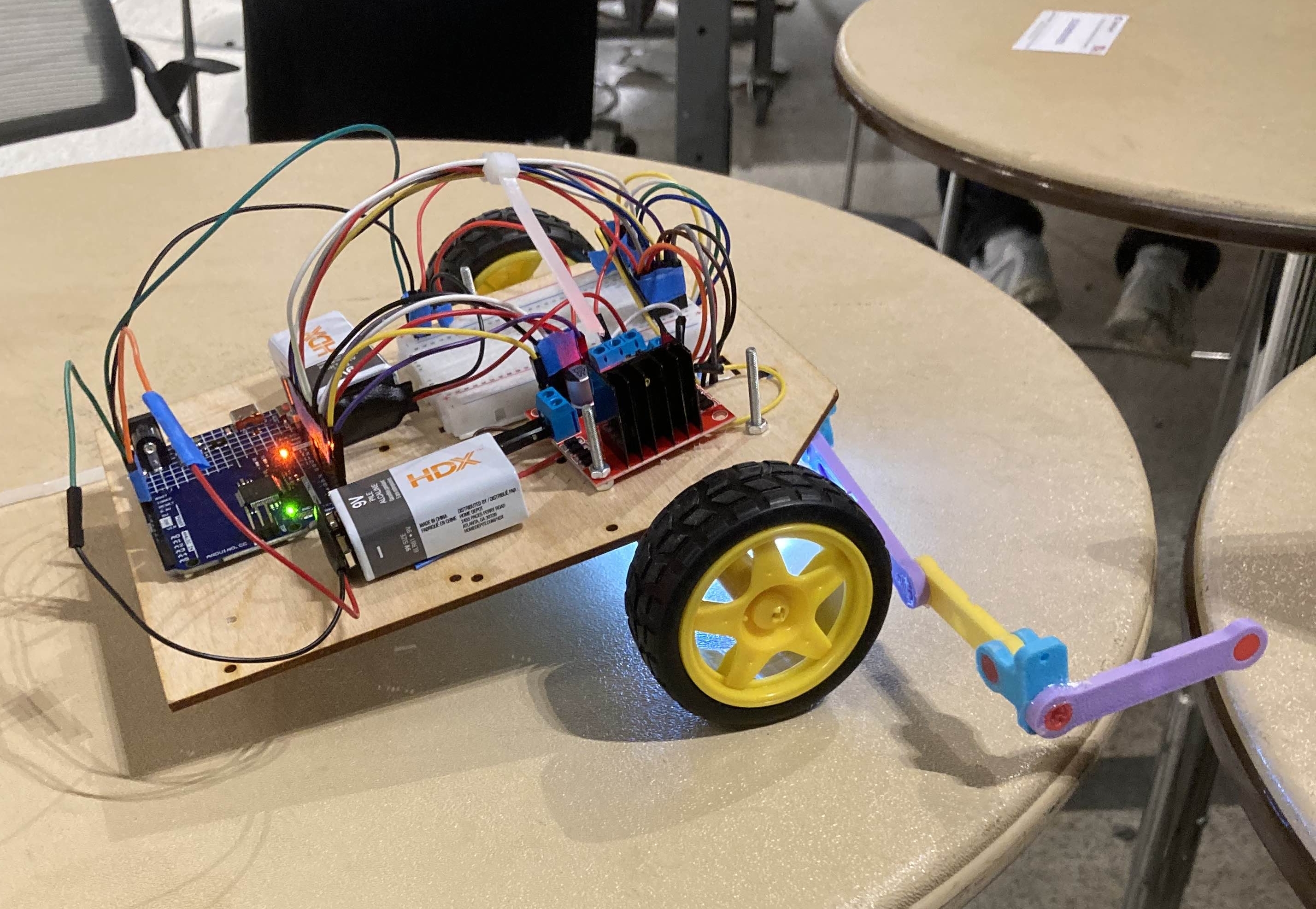
side view
-
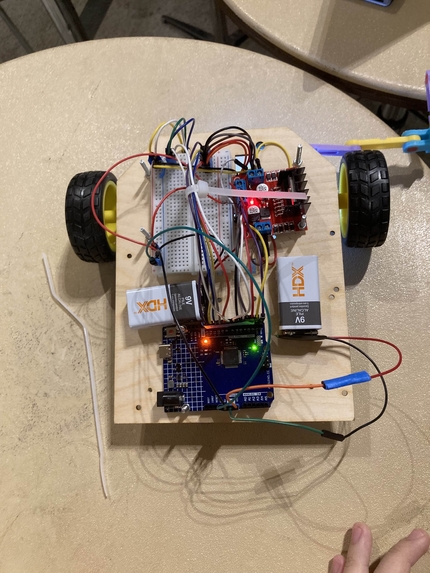
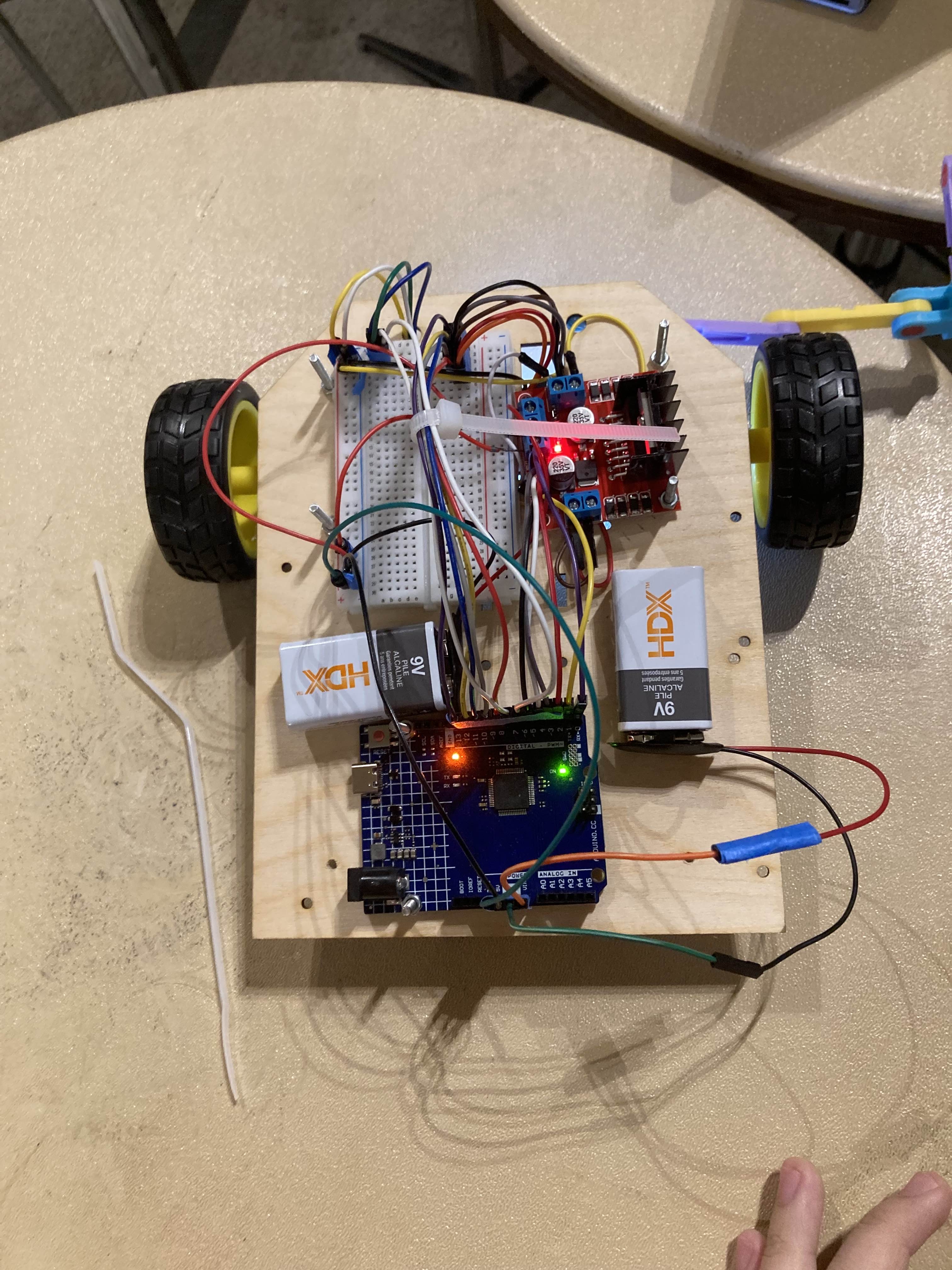
top view
Inspiration
Winter Olympic events like the biathlon highlight a rare balance of speed, precision, and composure under pressure. We were inspired by how athletes seamlessly switch between endurance-based movement and high-accuracy targeting, often in harsh and unpredictable conditions. TrainWreck takes this idea into robotics—challenging a robot to navigate complex terrain, make strategic decisions, and execute precise actions, all within a competitive environment.
What it does
TrainWreck is an autonomous robot designed to complete a multi-section challenge inspired by Winter Olympic events. It navigates a course, collects boxes to unlock optional paths, and strategically chooses which sections to attempt. In the Target Shooting section, the robot climbs ramps, uses color sensing to locate the center of a target, and launches a ball toward a scoring zone. In the Obstacle Course section, the robot follows a winding path filled with sharp turns and obstacles, optimizing for speed and smooth movement. The robot returns to its starting position to complete the run.
How we built it
We built TrainWreck by integrating mechanical design, electronics, and software control systems:
- Mechanical design for stability on ramps, reliable box pickup, and consistent ball launching
- Sensors for color detection, line following, and obstacle awareness
- Control algorithms to handle navigation, decision-making, and precise alignment at the target
- Modular code structure that allowed us to re-upload and refine logic between sections
- Iterative testing to tune movement speed, turning accuracy, and launch consistency Each subsystem was designed to work together under time and performance constraints.
Challenges we ran into
- Achieving consistent color-based navigation under varying lighting conditions
- Balancing speed vs. accuracy, especially when approaching the target center
- Ensuring the ball launcher delivered repeatable results without bouncing off walls
- Managing limited time to test edge cases like ramp transitions and sharp turns
- Coordinating hardware and software debugging simultaneously Many issues only appeared under full-course conditions, requiring rapid iteration.
Accomplishments that we're proud of
- Successfully navigating both optional sections within a single run
- Accurately locating the target center using color cues
- Launching the ball with controlled direction and distance
- Designing a robot that remained stable on both straight and curved ramps
- Building a system that rewarded strategy, not just raw speed Most importantly, TrainWreck performed reliably under competition pressure.
What we learned
- Small mechanical adjustments can dramatically affect software performance
- Sensor noise must be expected—and planned for—in real-world environments
- Modular code makes rapid iteration and debugging much easier
- Strategic decision-making is just as critical as technical execution
- Robotics challenges reward resilience, adaptability, and teamwork This project reinforced how tightly engineering disciplines are interconnected.
What's next for TrainWreck
- Improve target-shooting accuracy with closed-loop feedback
- Optimize path-planning to dynamically choose the highest-scoring route
- Enhance obstacle detection to reduce collision risk at higher speeds
- Refine the launcher for more predictable ball trajectories
- Add telemetry and logging for deeper performance analysis TrainWreck is just getting started. We see it as a foundation for even smarter, more competitive autonomous systems.

Log in or sign up for Devpost to join the conversation.