-
-
Trail Marshal
Inspiration
Damaged roads lead to uncomfortable and unsafe rides. While the average citizen is expected to report these issues, many don’t. Infrastructure problems often go unnoticed until they become expensive or dangerous. We wanted to create an automated way to detect and document road damage in real time.
What it does
Trail Marshal detects bumps and potholes using a 3-axis accelerometer. When significant vertical acceleration is detected, it generates a data point and sends it to the cloud. This allows road roughness to be monitored automatically, without relying on manual reporting.
How we built it
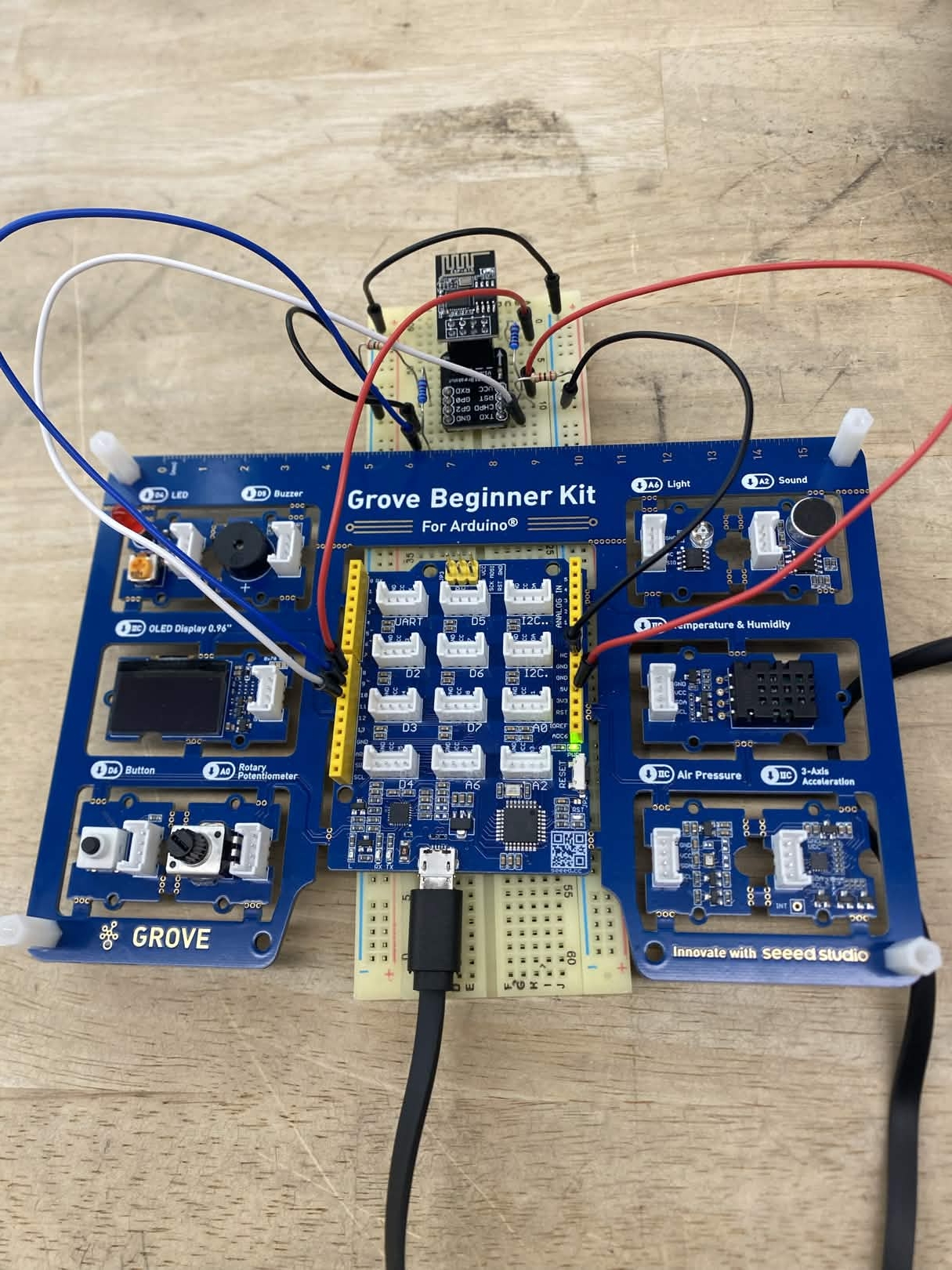
- Arduino Uno for sensor logic and bump detection
- A 3-axis accelerometer to measure vertical acceleration
- ESP-8266 module for Wi-Fi connectivity and cloud communication
- Adafruit IO to store and visualize the incoming data
Challenges we ran into
Deciding on the most effective way to collect data, while still being able to code in C Wiring for the ESP module
Accomplishments that we're proud of
Implementing filtering techniques in order to reduce noise and false positives Transmitting our sensor data from an Arduino to the cloud
What we learned
How to integrate embedded systems with IoT connectivity How to display cloud data on a website
What's next for Trail Marshal
Integrate a GPS module to map pothole locations Add data aggregation and heatmap visualization to determine if data reading is correct Miniaturize the hardware into a compact enclosure Adding an external power source

Log in or sign up for Devpost to join the conversation.