-
-
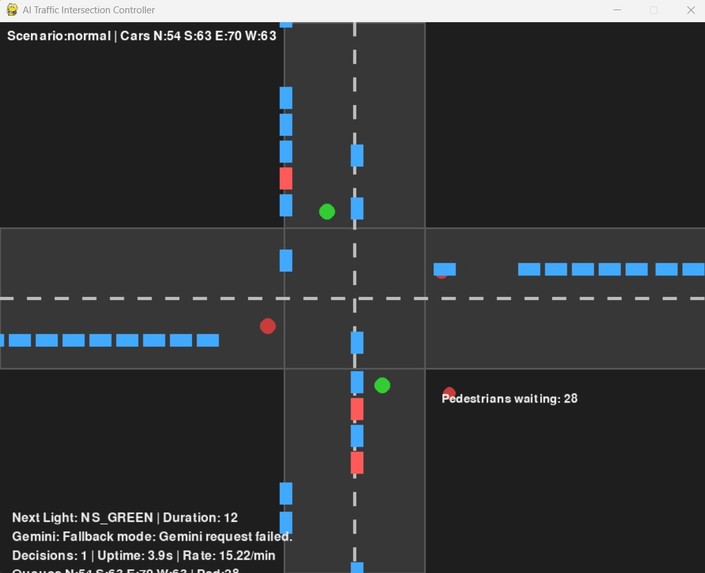
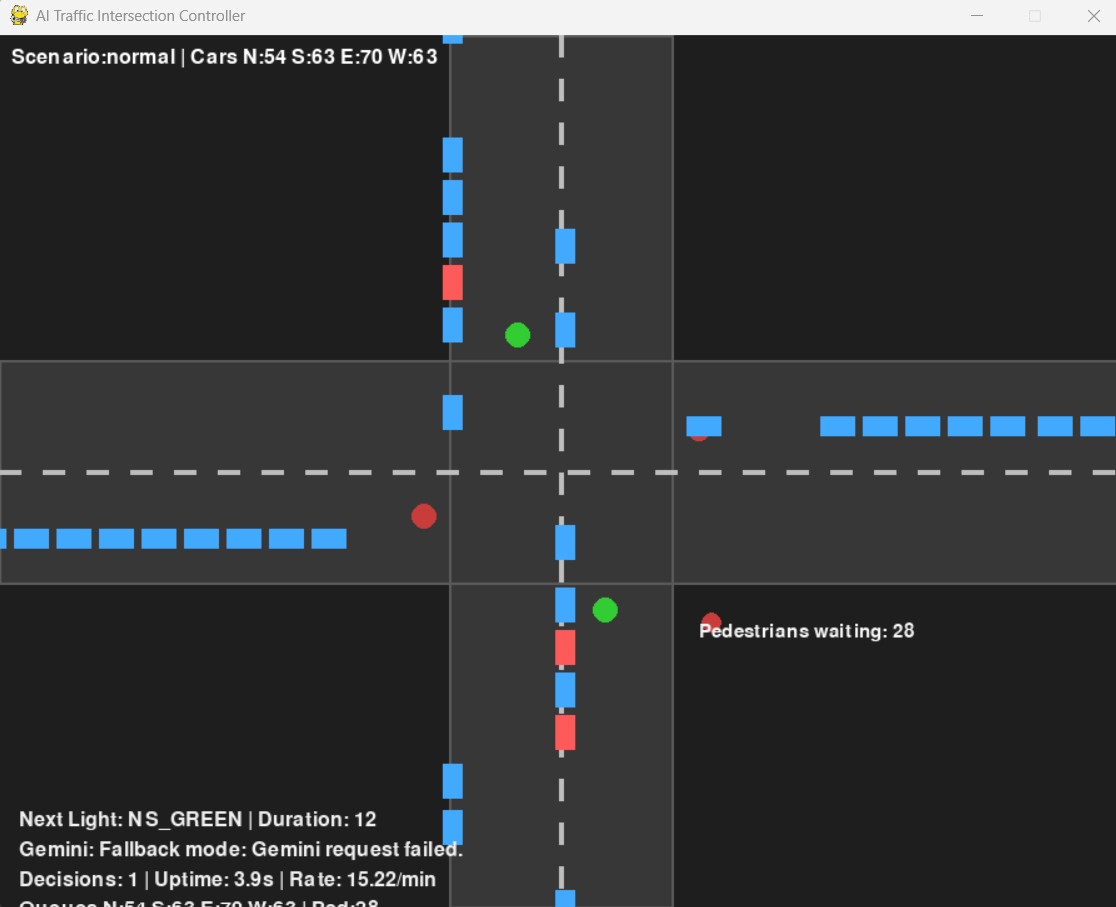
Simulated Intersection and Dashboard
Track Chosen: Robotics
Inspiration
Traffic congestion feels like a control problem that still gets handled with rigid timing plans. We were inspired by the idea of treating intersections like adaptive robotic systems: sense the environment, reason over priorities, and act safely in real time. We wanted to show that AI can support control logic, not replace safety constraints.
What it does
TrafficAutomation simulates a 4-way intersection and dynamically controls light phases using an AI decision loop. It continuously reads lane queues, pedestrian demand, and emergency-vehicle presence, then selects the next signal phase and duration with an explanation. It supports multiple demo scenarios, including normal flow, emergency spikes, and pedestrian-heavy traffic.
How we built it
We built the project as layered modules:
- Simulation layer: intersection state, car movement, spawning, rendering.
- State extraction layer: converts simulation into JSON for decision making.
- AI decision layer: prompts Gemini and parses structured responses.
- Controller layer: applies decisions with guardrails (phase validation, duration bounds, overrides).
- UI layer: dashboard and debug overlay for live observability.
Challenges we ran into
- Balancing AI flexibility with deterministic control safety.
- Handling fallback behavior when API keys are missing/invalid.
- Keeping scenario demos realistic while still predictable for judging.
Accomplishments that we're proud of
- A working real-time intersection demo with explainable decisions.
- Safety-aware controller constraints around AI outputs.
- A clean modular architecture that is easy to extend.
What we learned
- AI is strongest as a planner inside bounded control systems.
- Simulation-first development is fast for robotics-style prototyping.
- Observability (dashboards/overlays) is crucial for trust and debugging.
- Robust fallback paths are mandatory for production-like reliability.
What's next for TrafficAutomation
- Connect multiple intersections so they can work together, not just one at a time.
- Use computer vision input in the future to detect real traffic conditions.
- Add stricter safety rules before any light change is applied.
- Try running the system on small hardware for a real-world pilot demo.

Log in or sign up for Devpost to join the conversation.