-
-

Trackline
-

Hard work
-
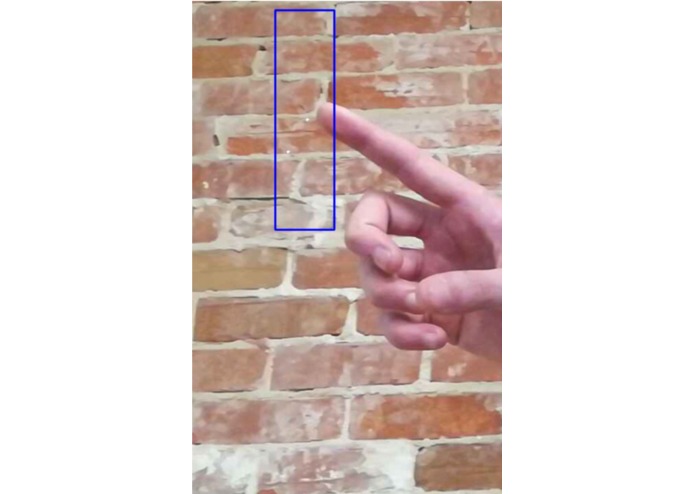
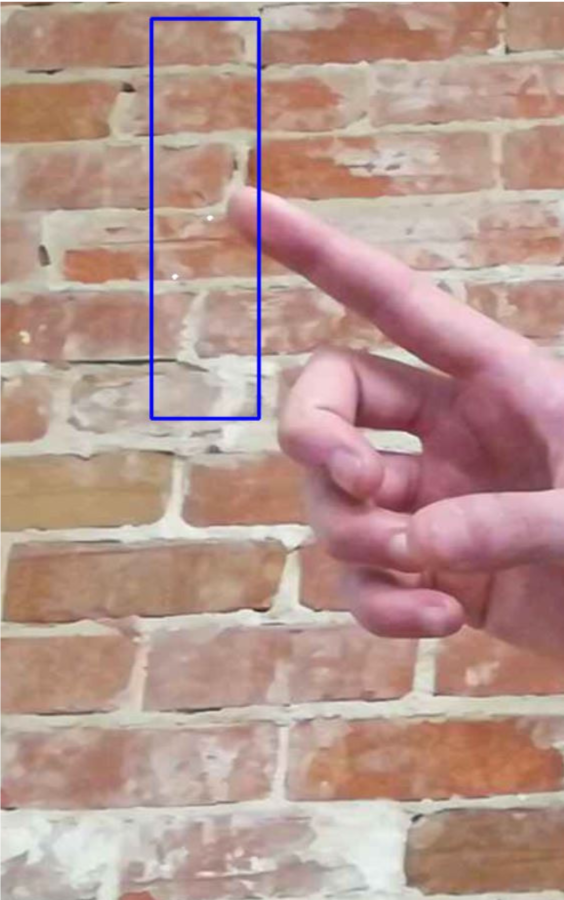
Motion tracking
-
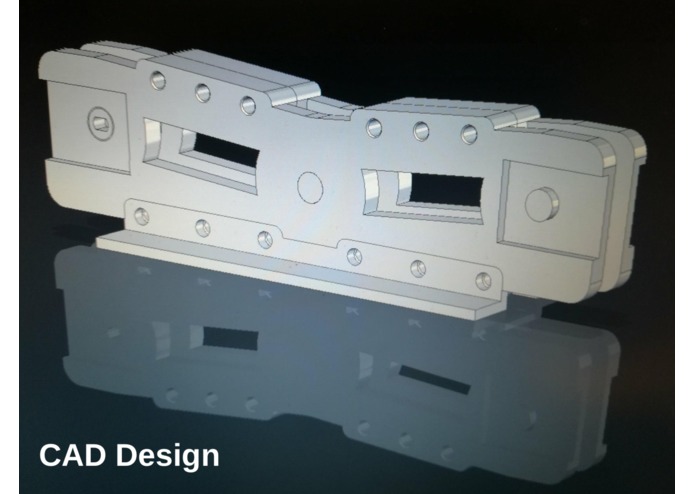
Chassis CAD
-

Example of reference to track
-
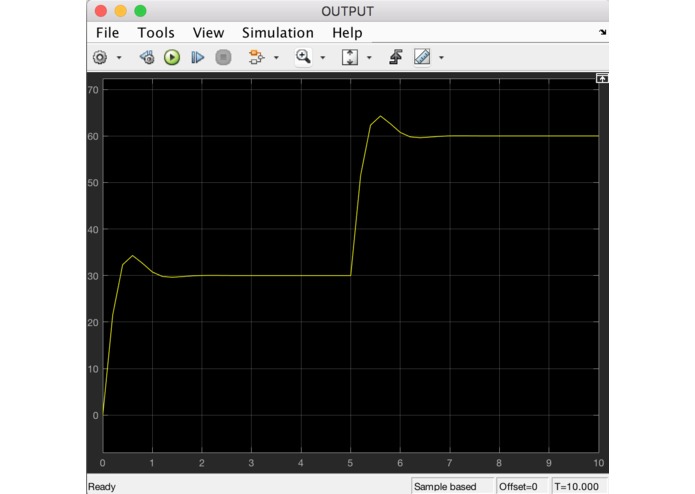
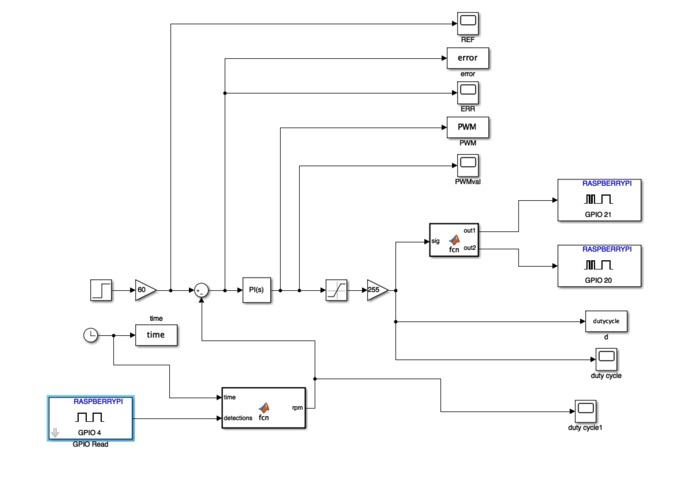
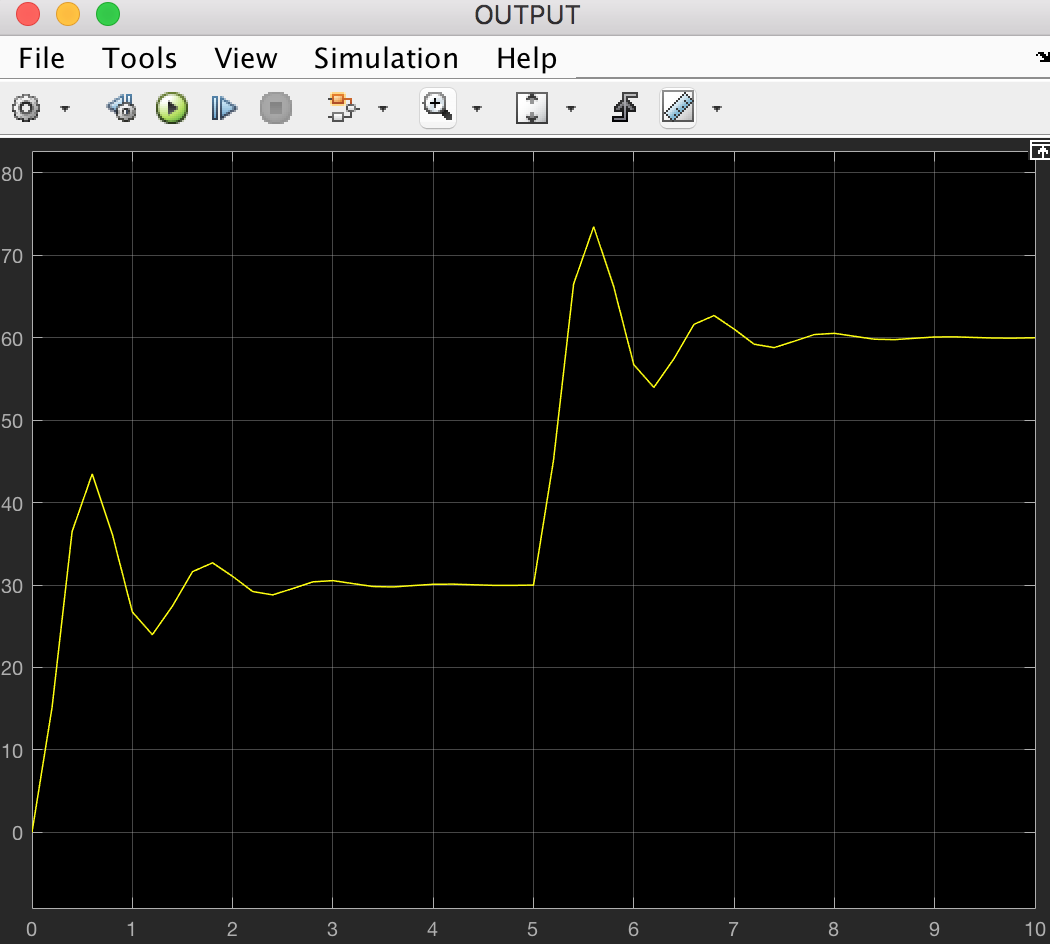
Output for optimal gains
-
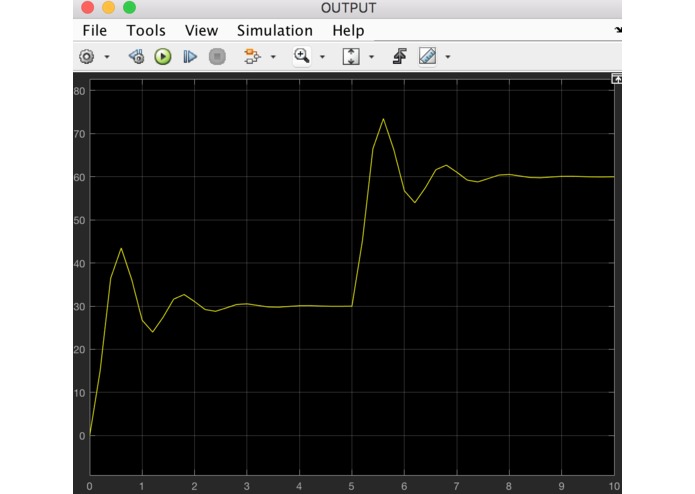
Output for intermediate gains
-
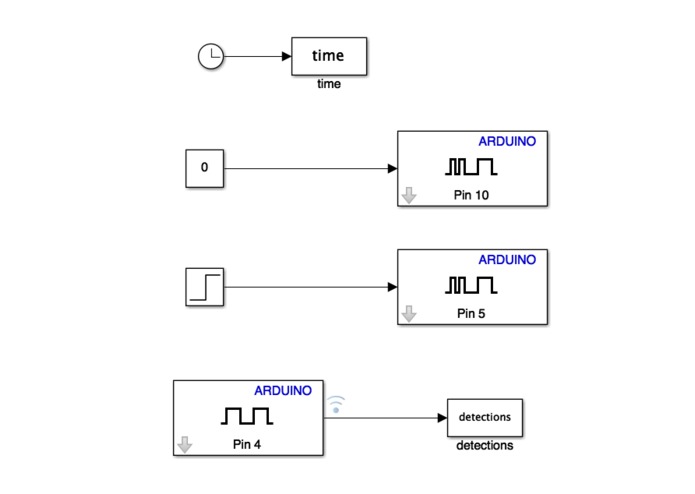
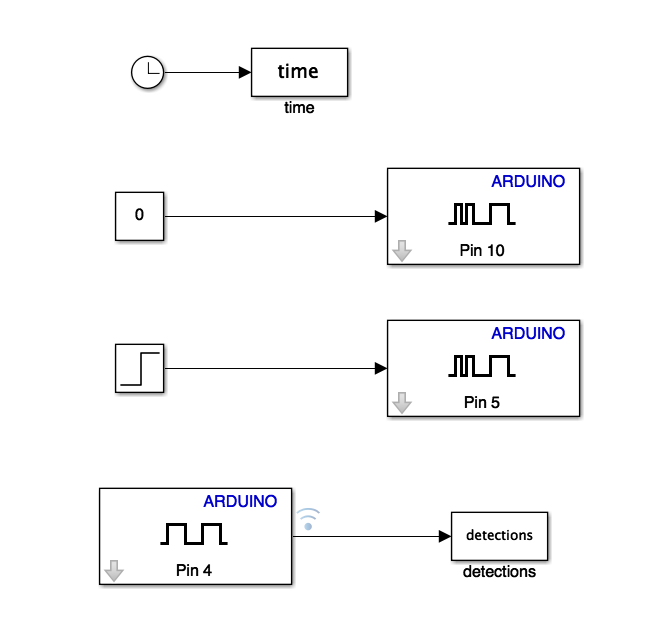
Model generation
-
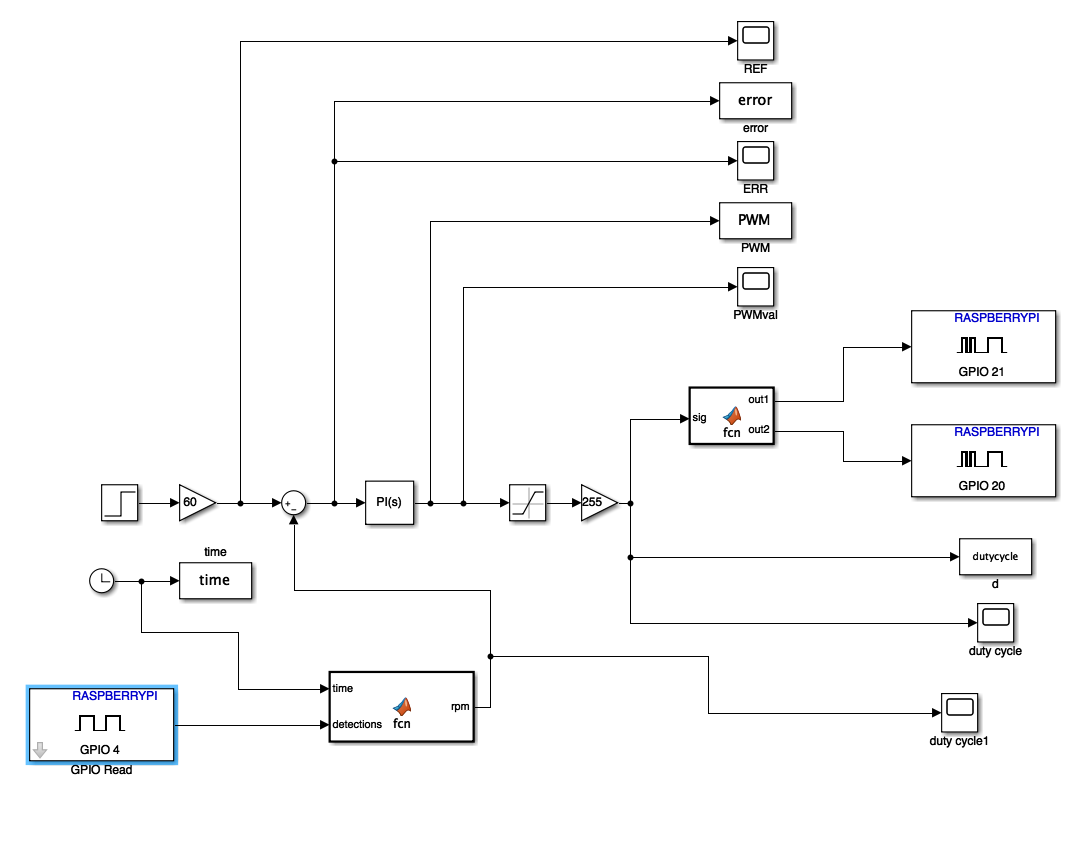
Iteration of feedback loop



Inspiration
Object tracking by drones, but also limitations of drones! Drones cannot fly through dense forests, need a pilot (for now) and are pretty expensive. All these limitations would be removed with the Trackline, a simple and cheap solution.
What it does
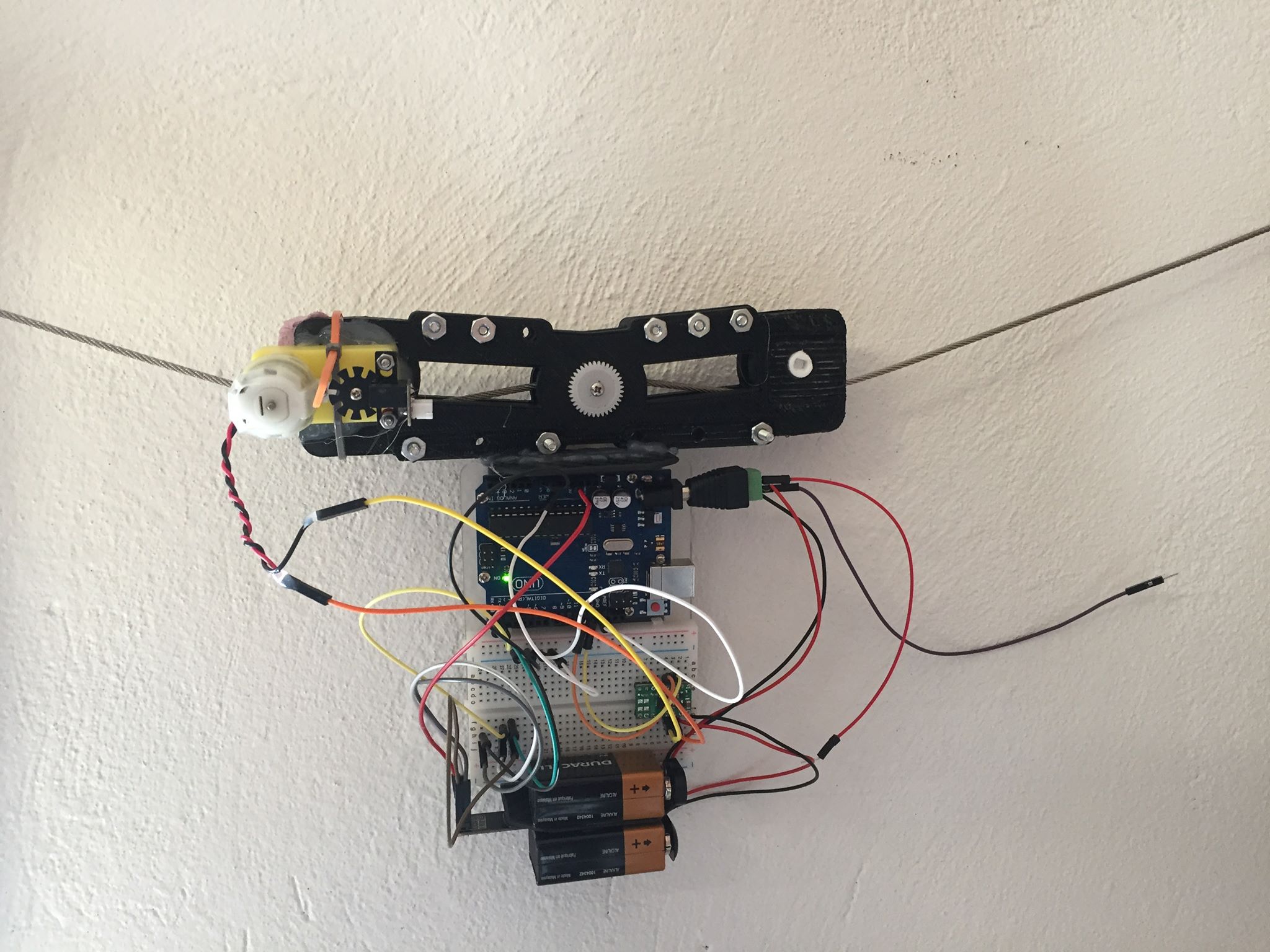
TrackLine is an easy to install and low cost system to create awesome pan shots with any desired camera. It is simply a matter of hooking a wire to two ends and the camera will track you wherever you go. With our robust solution, the user will be able to take the perfect shots to capture any experience.
How we built it
We used OpenCV to track an object or person. Behind the smooth motions, a robust PI control system was also tuned by creating a model of the motor using simulink and step responses. Finally to hold everything together, the chassis was carefully designed on Siemens NX CAD software with weight distribution, weight relief, stability and easy assembly in mind.
Challenges we ran into
Due to a lack of hardware availability and experience on specific libraries/software, the design choices had to change a lot throughout the 24 hours of the event (until the last 2 hours!)
Accomplishments that we are proud of
Achieve wireless operation of device
Realize tracking
Obtaining an accurate model for the motor
Tuning a PI controller to be robust to model uncertainty and disturbances, and have an error converging to 0
Combining 3D printed parts and carbon fiber to create a solid assembly
Integration of IR range finder to detect the end of the Trackline
What I learned
Low level communication protocols
Compiling models from simulink to arduino/raspberry pi
Working with limited hardware
Open CV
Team work under tight constraints (this was an ambitious project for us..)
Multidisciplinary coordination (Mechanical design, control systems, computer vision, telecommunication )
What's next for TrackLine
Configure openCV on the raspberry
Ratchet mechanism
Make the whole system smarter (eg. target goes out of frame)
Work with a high rpm motor
Aim to reduce power consumption
Real time simulation with digital inputs
Safety protocols
Testing
More testing
Business plan ?







Log in or sign up for Devpost to join the conversation.