-

First Primary Source
-

Second Primary Source Demo
-

Soil Samples from Second Primary Source
-
Tilled Soil Sample from Second Primary Source
-

Tilled Soil from Second Primary SOurce
-

Grassland Soil Sample to show cleaner water with this type of soil
-
Grassland Soil from Second Primary Source
-

Grassland Soil from Second Primary Source
-

2nd Primary Source Main Exhibit
-
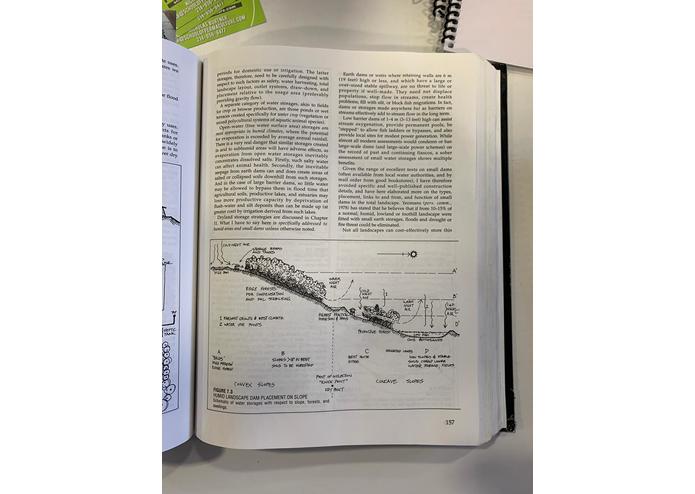
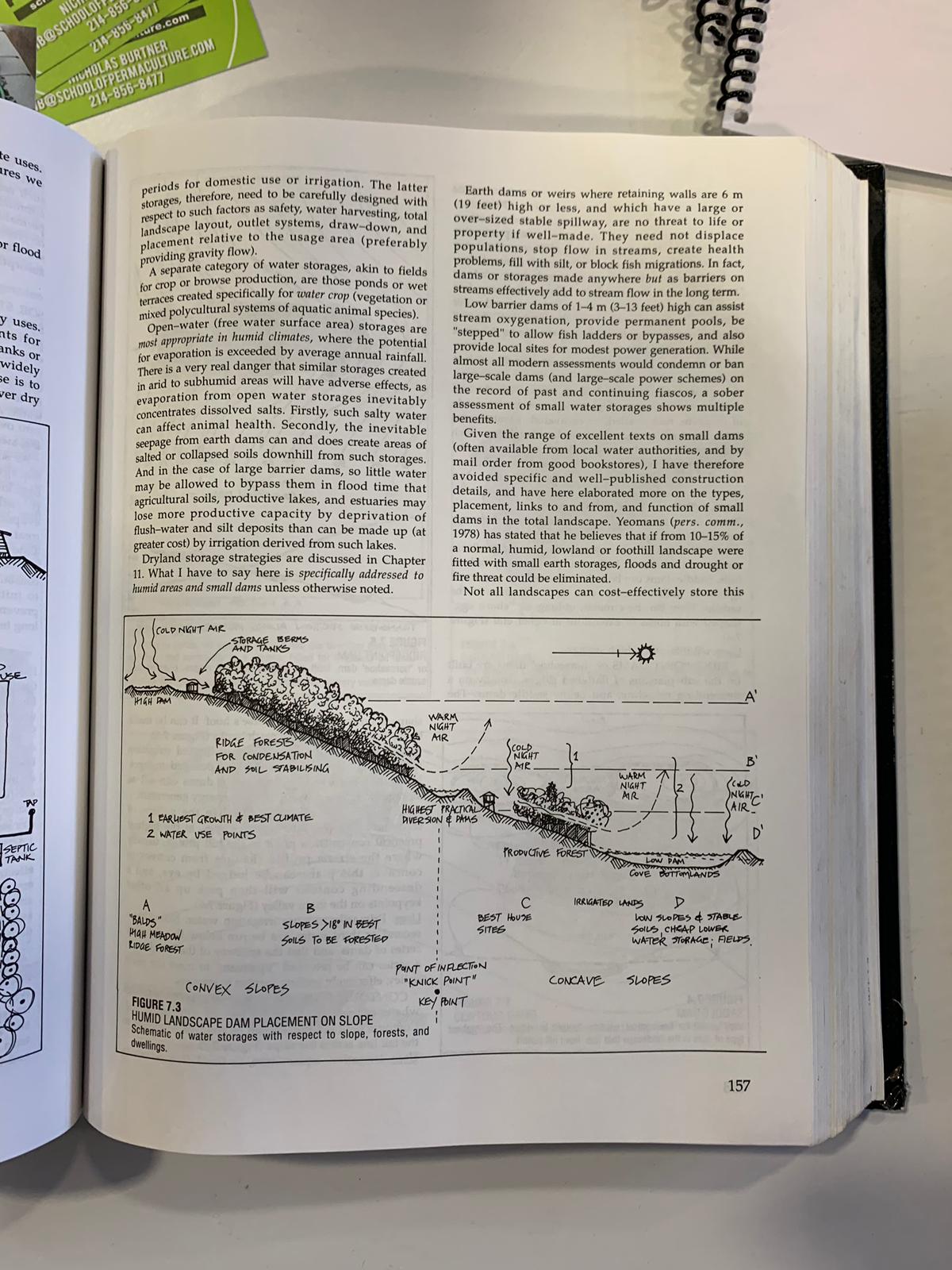
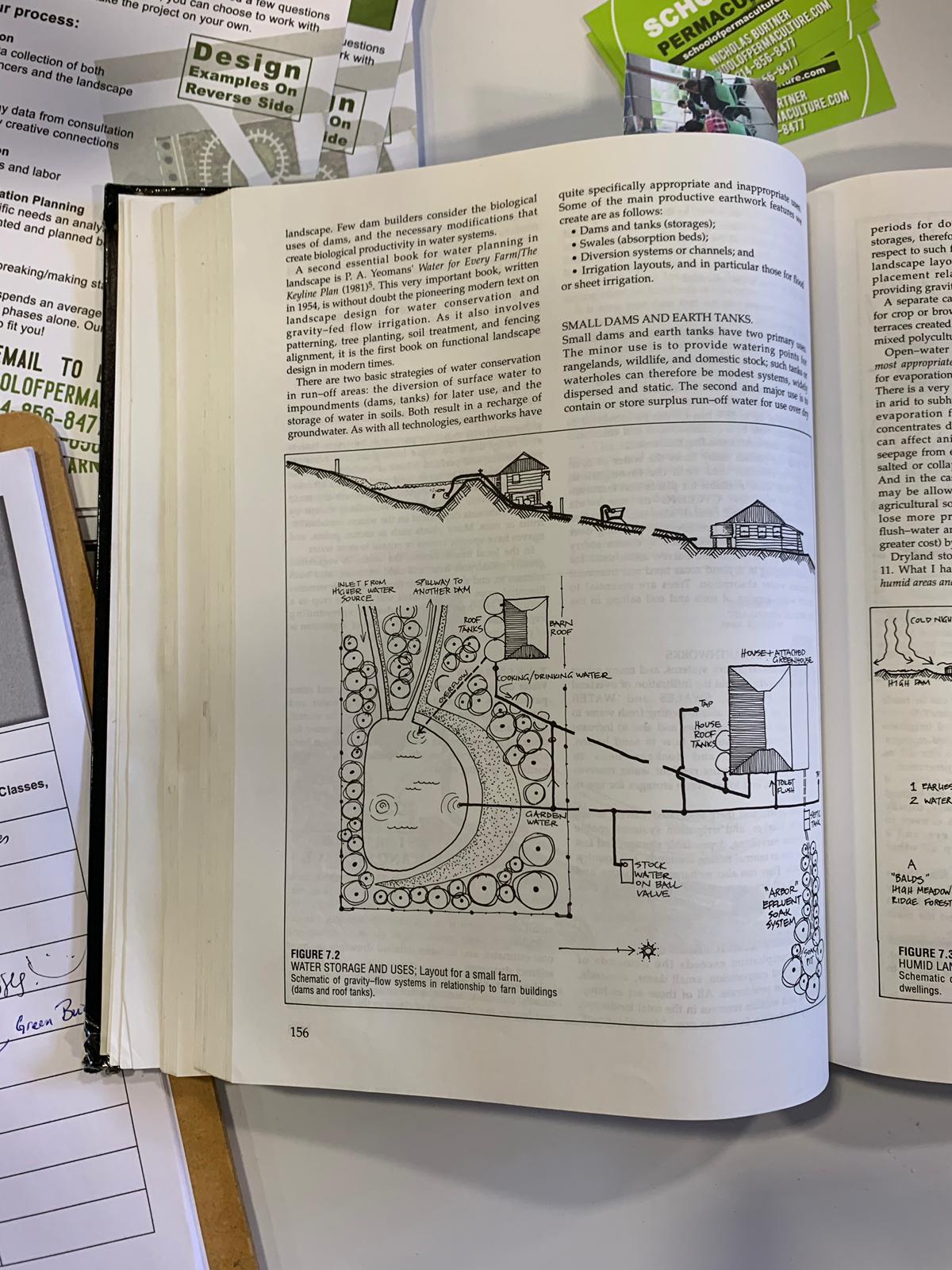
3rd Primary Source -- Book Used for Permaculture (Technique 1)
-
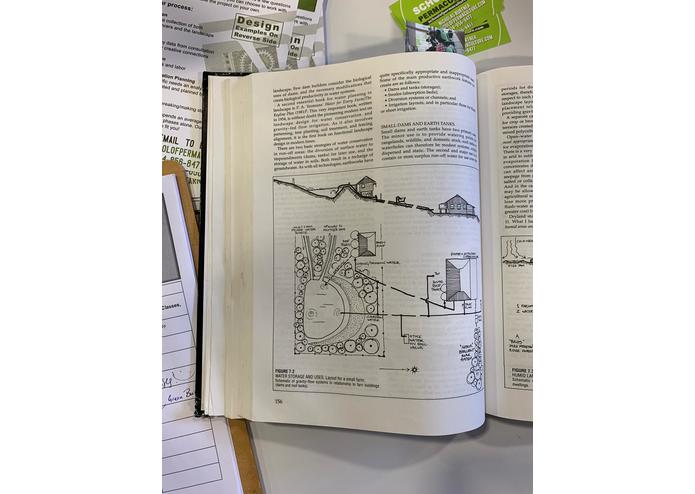
3rd Primary Source -- Book Used For Permaculture (Permaculture Technique 2)
-

What is Permaculture (3rd Primary Source)
-

NRCS -- 4th Primary Source









Inspiration
After identifying we wanted to work on the State Farm challenge, our team worked to find an effective solution or method of water conservation in Texas. Our initial discussions revolved around two divides: creating something that could be implemented locally and globally. The second divide we had was whether we wanted to create a product that focused on purification of contaminated water vs building something that allowed for easier access of water. We decided that instead of thinking of specific ideas at first, it might have been a better idea to think of the project from a more broad perspective. With this broad perspective, we decided to go back to research and development. Within an hour, our research led us to find the two largest groups which use the most water in Texas: industries that use water thermochemically and irrigation. After exploring the feasibility of each of making an attempt to decrease the consumption from both of these fields, we settled on irrigation.
What it does
The goal of our software is to create an algorithm which optimizes water usage based on a variety of regional topological factors. The water optimization portion of the project includes helping farmers have an initial irrigation point a particular location that will allow for the runoff generated by the crop to be cleaned as it makes to the downstream portion of the plantation or crops. Our project uses software to pull information on plant types from pre-existing databases and uses hardware from the Kinect sensor in order to sense gradients, slopes, and general changes in topography. With these characteristics of the region, we will be able to create the optimal method to optimize water usage through surface irrigation. Specifically our program will generate the relative locations where one should place there plants and what types of plants should be placed in different parts of the region. With this information, the farmer will be able to use a variety of plants to help clean runoff and thus minimize the amount of water lost.
How we built it
In order to build this, we used a Microsoft SDK for the X-Box Kinect. This portion allowed us to visualize the gradients. The team used a simulation environment as a cellular automaton. Further, the group used a genetic algorithm to optimize crop layout.
Challenges we ran into
The Kinect sensor did not initially work because the resolution and the firmware on the Kinect were not syncing up. Furthermore, it took several hours to set up the right position in order to accurately observe all of the gradients. It was too computationally expensive to run flow real world simulations.
Accomplishments that we're proud of
In the end, we we were able to use the Kinect sensor to accurately map topography and generate an algorithm that helps layout plants effectively.
What we learned
Implementing concepts such as Fluid Dynamics was harder than it seems.We needed more physical objects such as Jenga blocks for support and what we thought were "minor adjustments" but ultimately significantly helped our project.
What's next for TopSoil
Eventually, the team would like to see TopSoil integrate more features that could better evaluate the regional conditions such as precipitation and evaporation rates in order to increase the efficiency.
Built With
- c#
- kinect
- processing
- python
- software
- xamarin




Log in or sign up for Devpost to join the conversation.