-
-

That's okay Todd, you'll get them next time
-
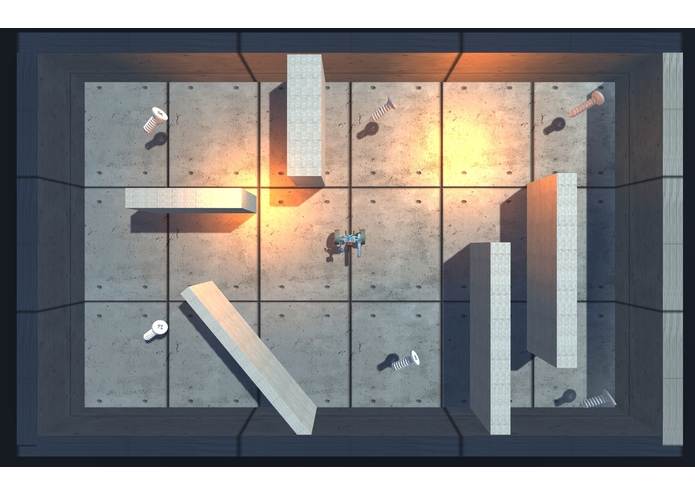
The virtual Todd, about to embark on his journey
-

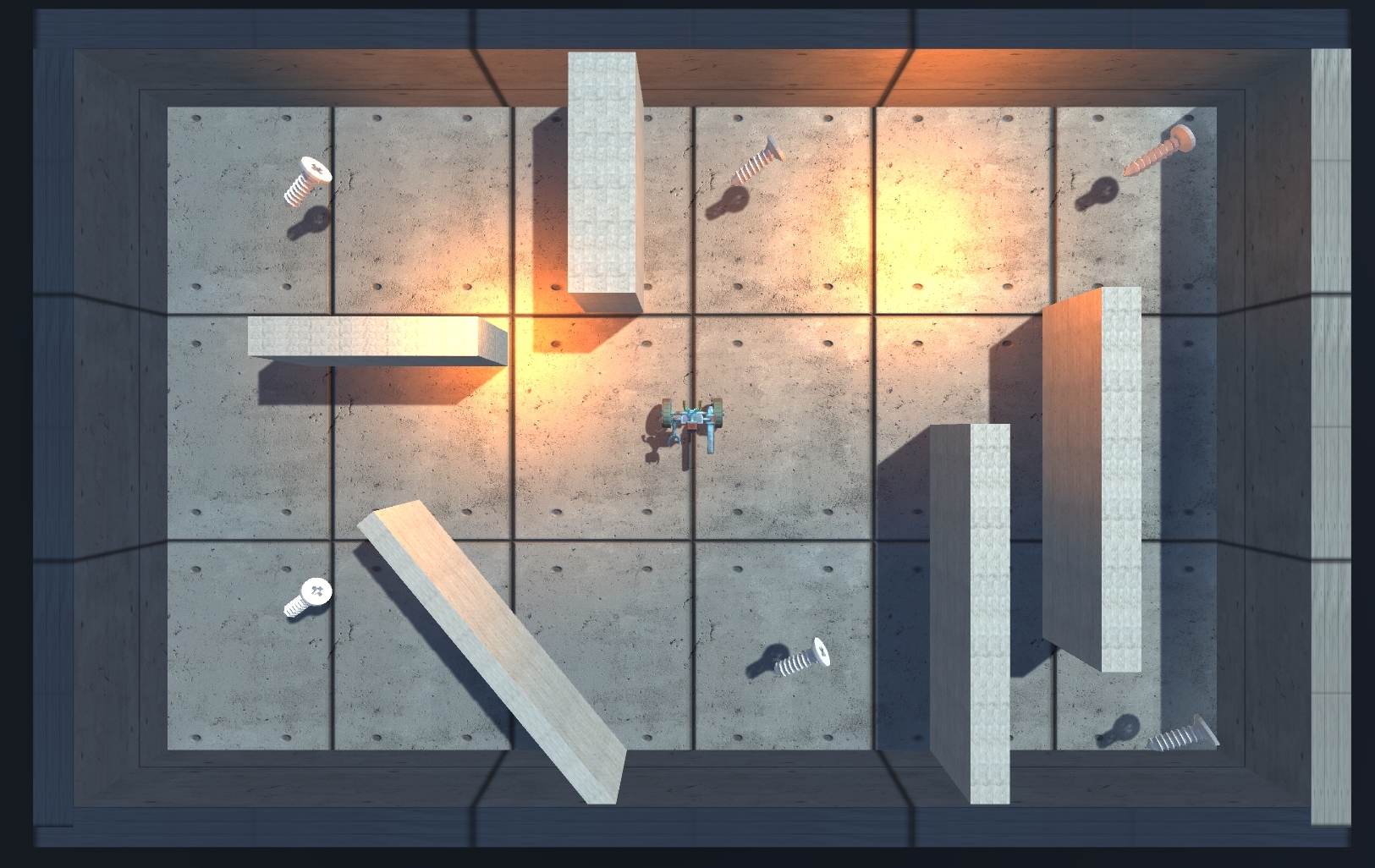
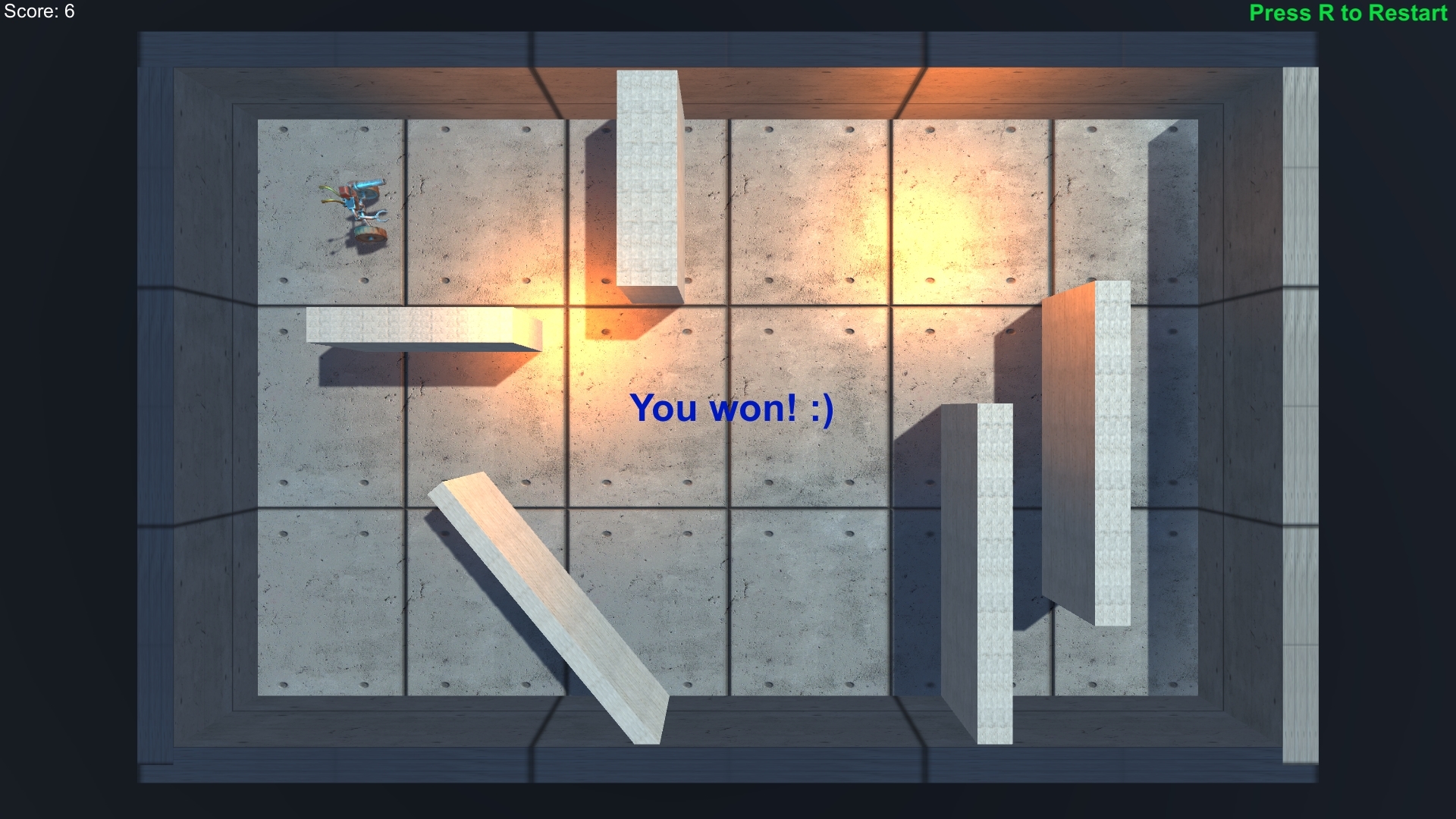
A victorious virtual Todd celebrates
-
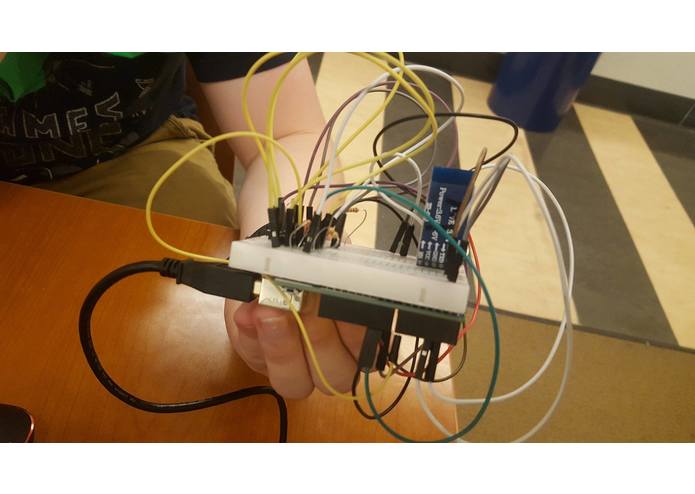
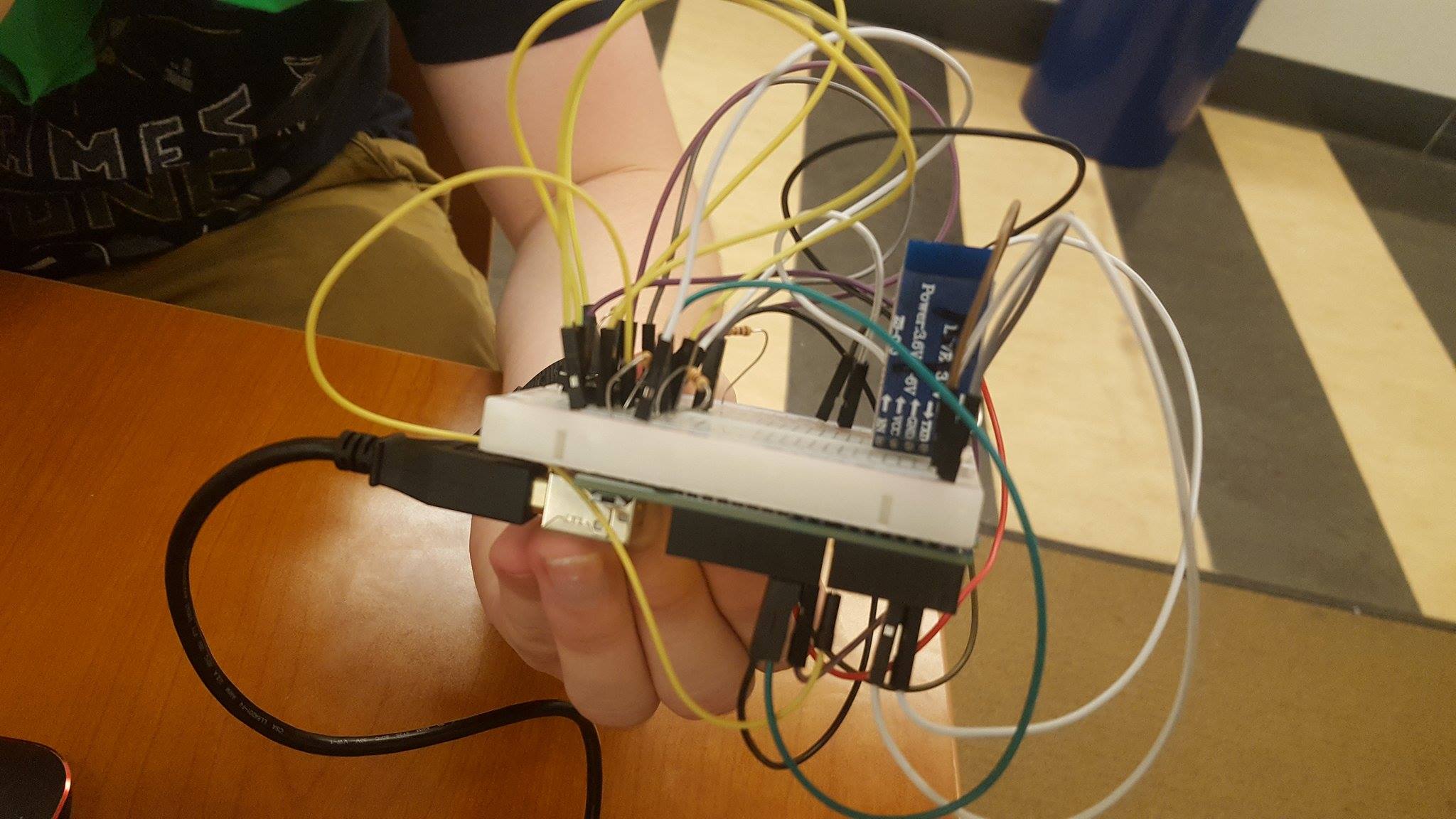
The custom built Todd Controller
-
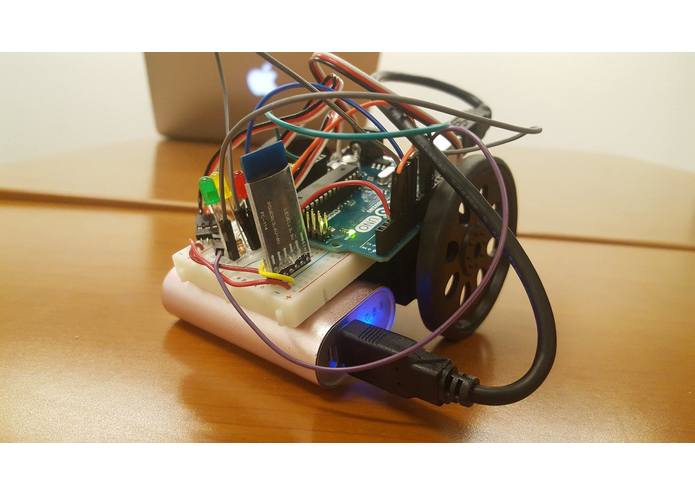
Todd in all his glory


Inspiration
We wanted to make something that linked the virtual and real worlds, but in a quirky way. On our team we had people who wanted to build robots and people who wanted to make games, so we decided to combine the two.
What it does
Our game portrays a robot (Todd) finding its way through obstacles that are only visible in one dimension of the game. It is a multiplayer endeavor where the first player is given the task to guide Todd remotely to his target. However, only the second player is aware of the various dangerous lava pits and moving hindrances that block Todd's path to his goal.
How we built it
Todd was built with style, grace, but most of all an Arduino on top of a breadboard. On the underside of the breadboard, two continuous rotation servo motors & a USB battery allows Todd to travel in all directions.
Todd receives communications from a custom built Todd-Controller^TM that provides 4-way directional control via a pair of Bluetooth HC-05 Modules.
Our Todd-Controller^TM (built with another Arduino, four pull-down buttons, and a bluetooth module) then interfaces with Unity3D to move the virtual Todd around the game world.
Challenges we ran into
The first challenge of the many that we ran into on this "arduinous" journey was having two arduinos send messages to each other via over the bluetooth wireless network. We had to manually configure the setting of the HC-05 modules by putting each into AT mode, setting one as the master and one as the slave, making sure the passwords and the default baud were the same, and then syncing the two with different code to echo messages back and forth.
The second challenge was to build Todd, the clean wiring of which proved to be rather difficult when trying to prevent the loose wires from hindering Todd's motion.
The third challenge was building the Unity app itself. Collision detection was an issue at times because if movements were imprecise or we were colliding at a weird corner our object would fly up in the air and cause very weird behavior. So, we resorted to restraining the movement of the player to certain axes. Additionally, making sure the scene looked nice by having good lighting and a pleasant camera view. We had to try out many different combinations until we decided that a top down view of the scene was the optimal choice. Because of the limited time, and we wanted the game to look good, we resorted to looking into free assets (models and textures only) and using them to our advantage.
The fourth challenge was establishing a clear communication between Unity and Arduino. We resorted to an interface that used the serial port of the computer to connect the controller Arduino with the unity engine. The challenge was the fact that Unity and the controller had to communicate strings by putting them through the same serial port. It was as if two people were using the same phone line for different calls. We had to make sure that when one was talking, the other one was listening and vice versa.
Accomplishments that we're proud of
The biggest accomplishment from this project in our eyes, was the fact that, when virtual Todd encounters an object (such as a wall) in the virtual game world, real Todd stops.
Additionally, the fact that the margin of error between the real and virtual Todd's movements was lower than 3% significantly surpassed our original expectations of this project's accuracy and goes to show that our vision of having a real game with virtual obstacles .
What we learned
We learned how complex integration is. It's easy to build self-sufficient parts, but their interactions introduce exponentially more problems. Communicating via Bluetooth between Arduino's and having Unity talk to a microcontroller via serial was a very educational experience.
What's next for Todd: The Inter-dimensional Bot
Todd? When Todd escapes from this limiting world, he will enter a Hackathon and program his own Unity/Arduino-based mastery.

Log in or sign up for Devpost to join the conversation.