Inspiration
"We had the technology!"
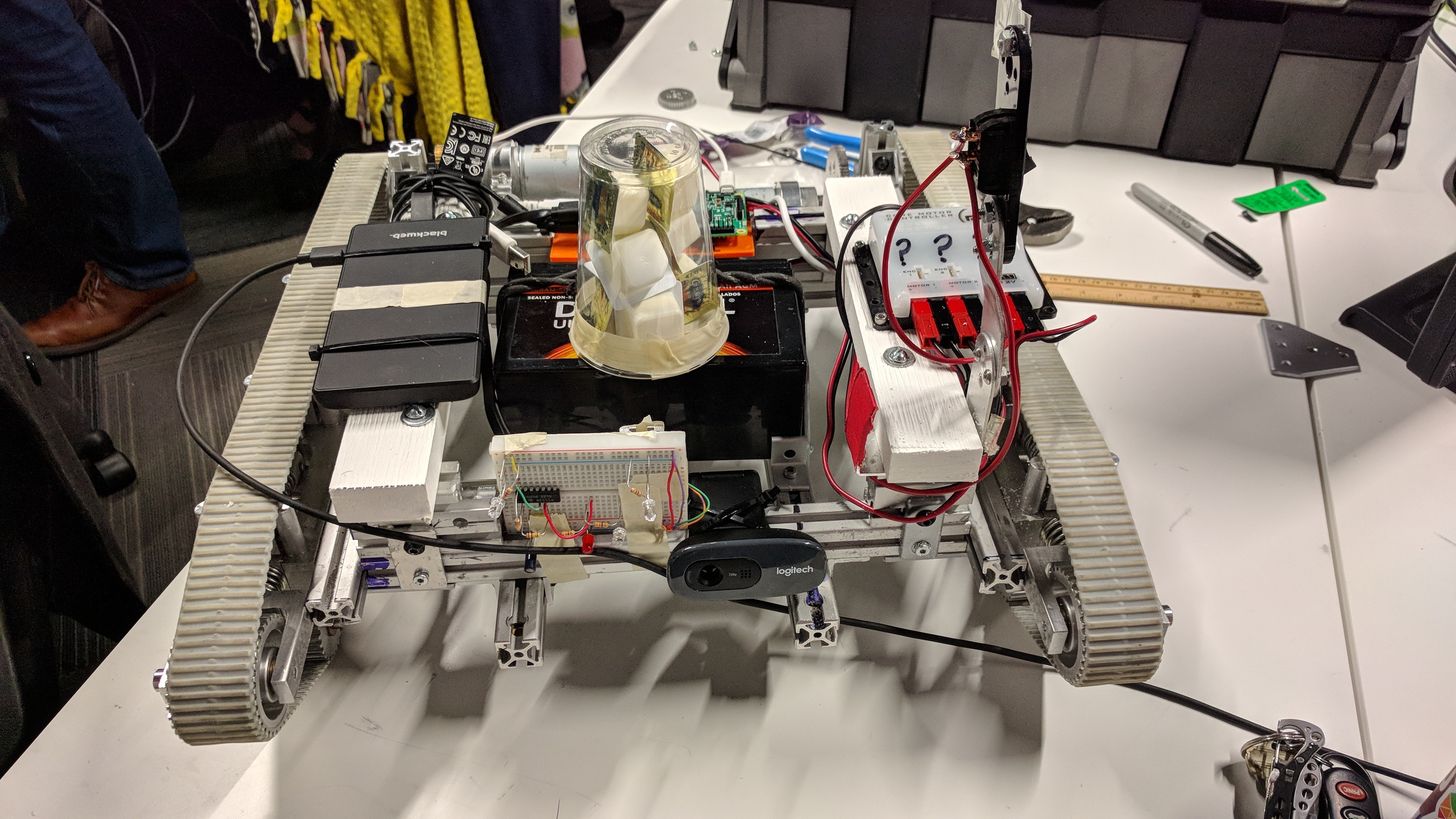
We had a bunch of spare parts laying around so decided to build a robot. Our robot includes a webcam for remote monitoring. We believe TOD could be the perfect companion for all your observation needs.
What it does
It moves, and it has a camera with which the user can observe what TOD is seeing. TOD is also well equipped to deal with butter movement scenarios due to its ability to overcome most obstacles, and move long distances.
TOD is controlled with a raspberry pi running raspbian Linux. The drive system is powered by a 12 V lead acid battery and the control system is powered by a portable 5V battery pack. TOD had a web cam hooked up to the pi. The Pi can be accessed wirelessly through the WiFi AP it broadcasts. Interactive Python programs allow us to control TOD via keyboard input.
TOD also includes expertly designed headlights that blink.
How we built it
We had a robot frame sitting around and decided to put a bunch of our electronics on it.
Challenges we ran into
Motor Controller
One interesting challenge we encountered was how to use FTC motor controller from a raspberry pi. The controller is exposed as a serial port over USB. The official software API for it is built on .NET framework and so would only run on desktop windows (not Linux on a raspberry pi).
We used WireShark to capture the USB IRPs sent through Windows to record what bytes are sent over the serial connection to make the controller power the motors. After that, we simply wrote a small application on the Pi to open the serial port and write the correct bytes to achieve the desired movement.
Use of Old Parts
A lot of the mechanical parts we used are old/retired from previous robots and barely worked. Our motor mounts had to be designed and built out of old mismatched robot parts. We encountered several instances of motor slippage and had to adjust our gear ratios accordingly.
Accomplishments that we're proud of
- Reverse engineering the motor controller protocol
- How quickly the robot was constructed
- Headlights
- How it looks
What we learned
- How to reverse engineer USB protocols
- How to use a 556 timer IC for headlights
- Building robots with friends is fun. 10/10 Would robot again.
What's next for tod
- Probably being dismantled since it is built from parts owned by different people.
Built With
- aluminum
- c
- hostapd
- motion
- python
- raspberry-pi
- wireshark



Log in or sign up for Devpost to join the conversation.