-
-

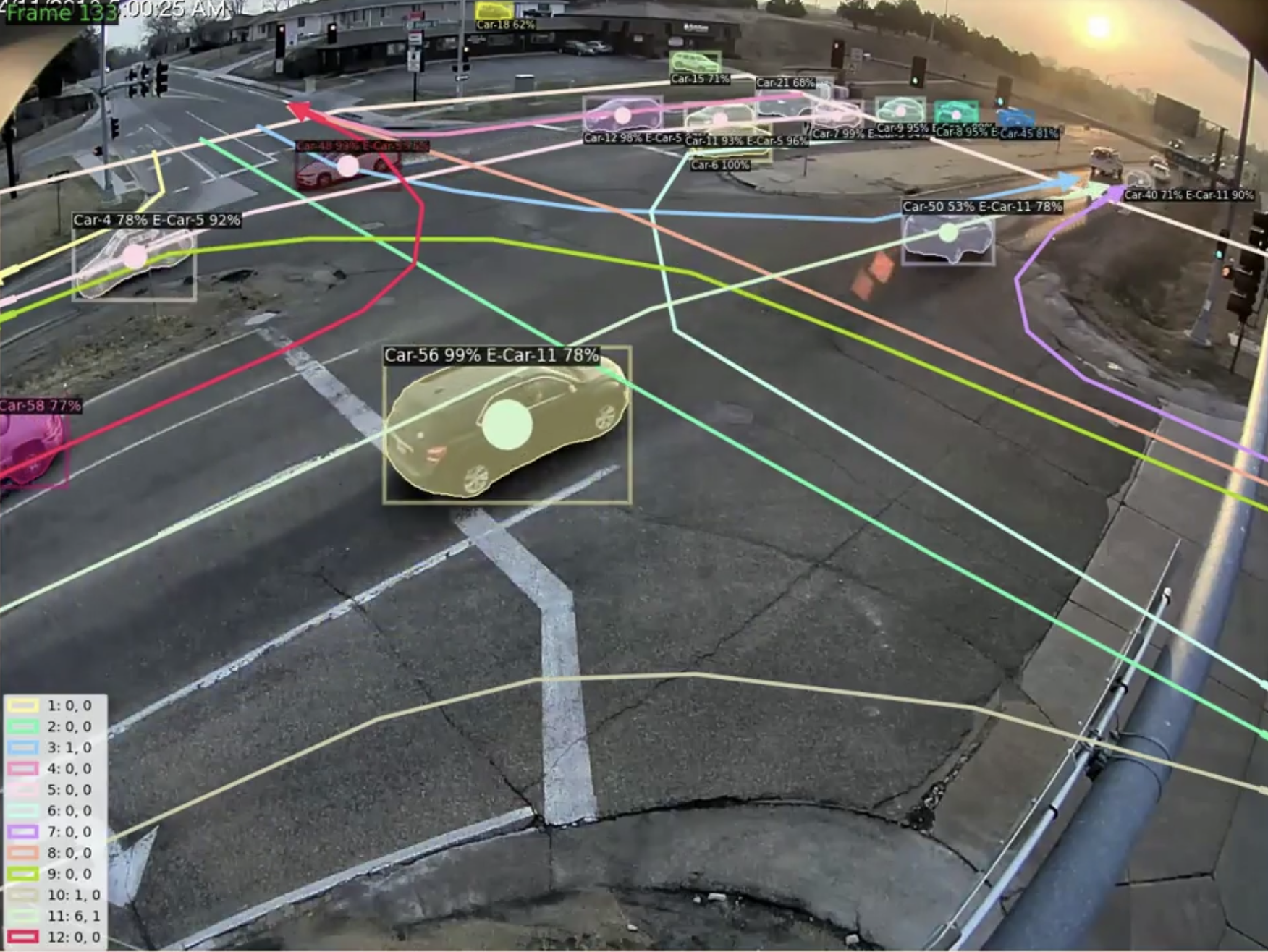
original video
-
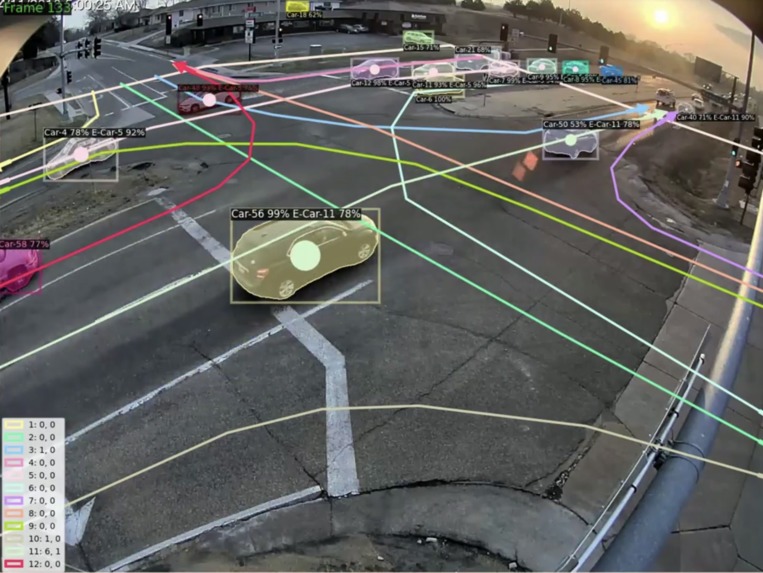
inferred video
-
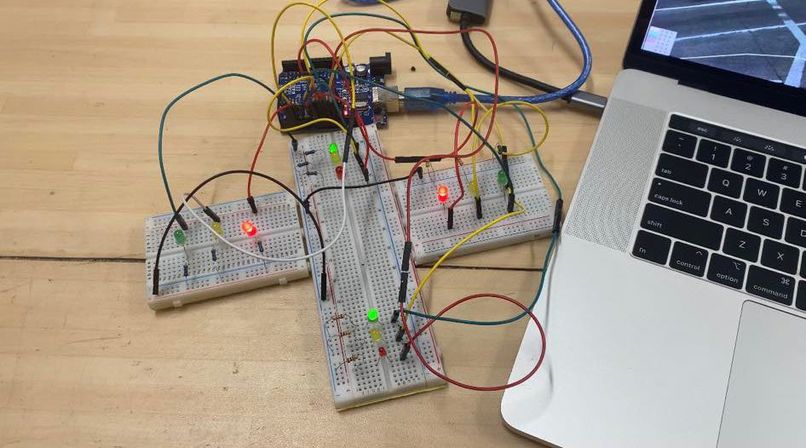
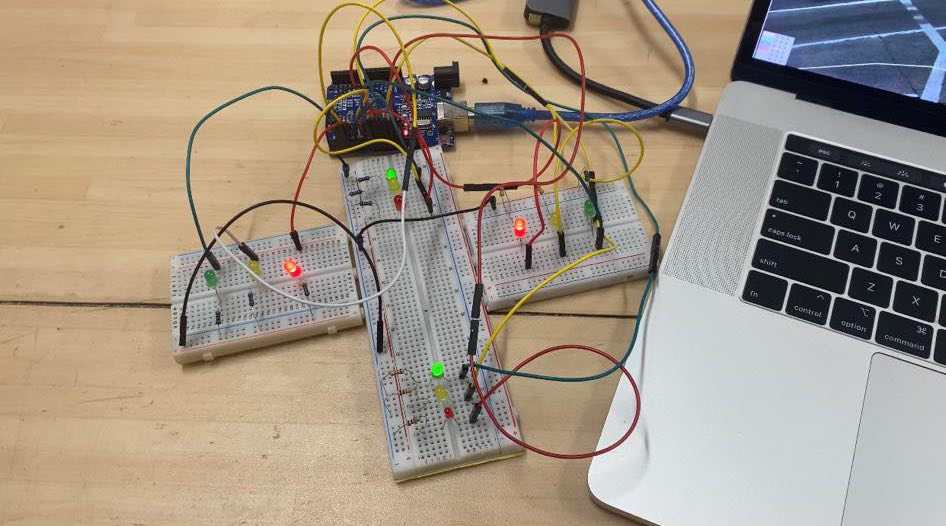
Arduino-controlled circuit
-
Slide 1
-
Slide 2
-
Slide 3
-
Slide 4
-
Slide 5
-
Slide 6
-
Slide 7






Inspiration
Traffic jam is one of the most serious problems that the process of rapid urbanization has created. It is not only the time wasted but also the carbon dioxide emitted by vehicles. But what if there was a way to use the data we can now collect on traffic cameras to reduce it? With that in mind, we want to introduce our solution, AATLaS, Auto-Adaptive Traffic Light System that deftly resolves the problem one crossroad at a time.
What it does
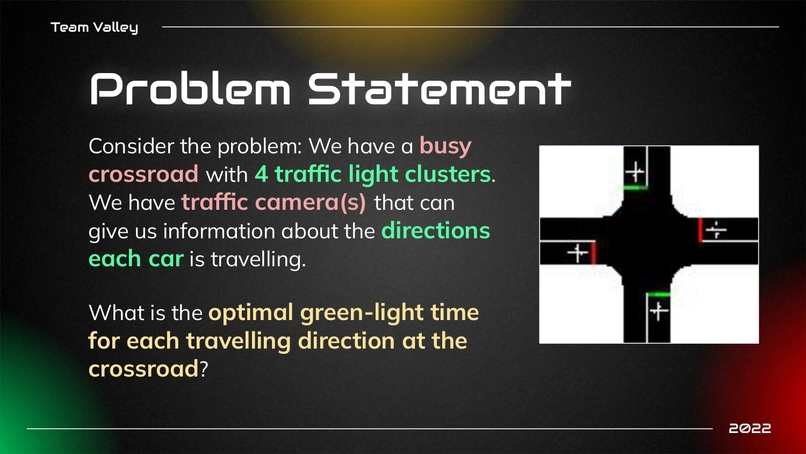
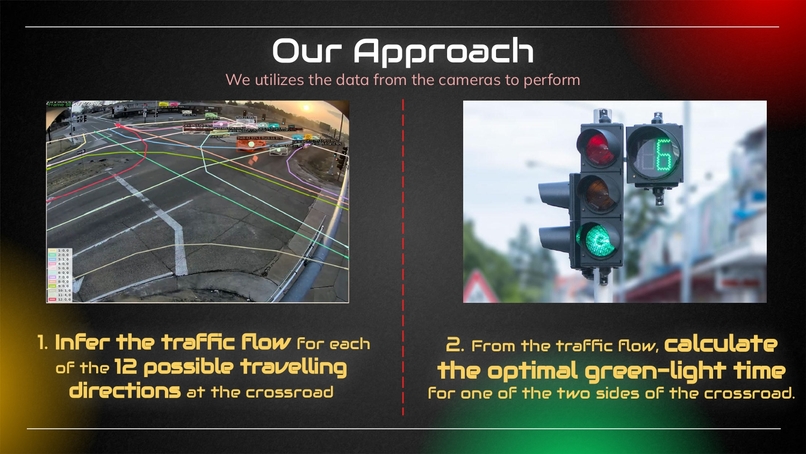
To reduce traffic jam, our team will tap on data from the traffic cameras. From these, the detectron will calculate and feed the traffic flow of each lane to SUMO. The deep reinforcement learning model will learn on this simulated environment to give the optimal green-light time for each traveling direction at the crossroad.
For instance, in the morning, road A has more vehicles moving than road B and our traffic camera will recognize that the traffic flow of A is larger than B. After that, the time display of red-light will decrease and green-light one will increase to reduce the total waiting time of vehicles on road A.
How we built it
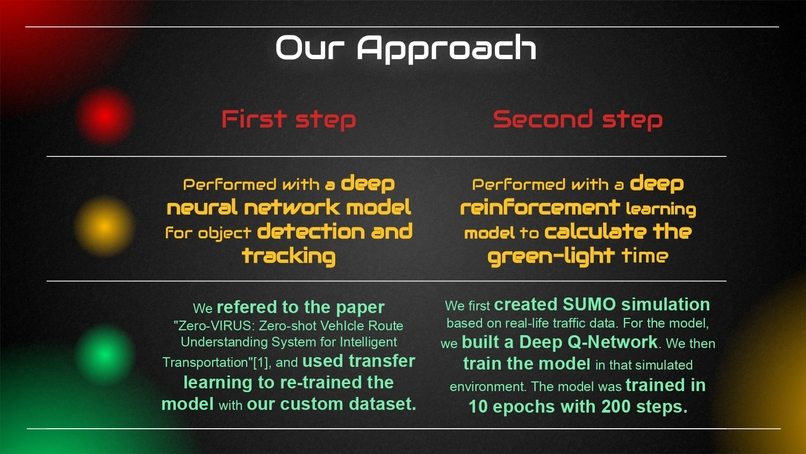
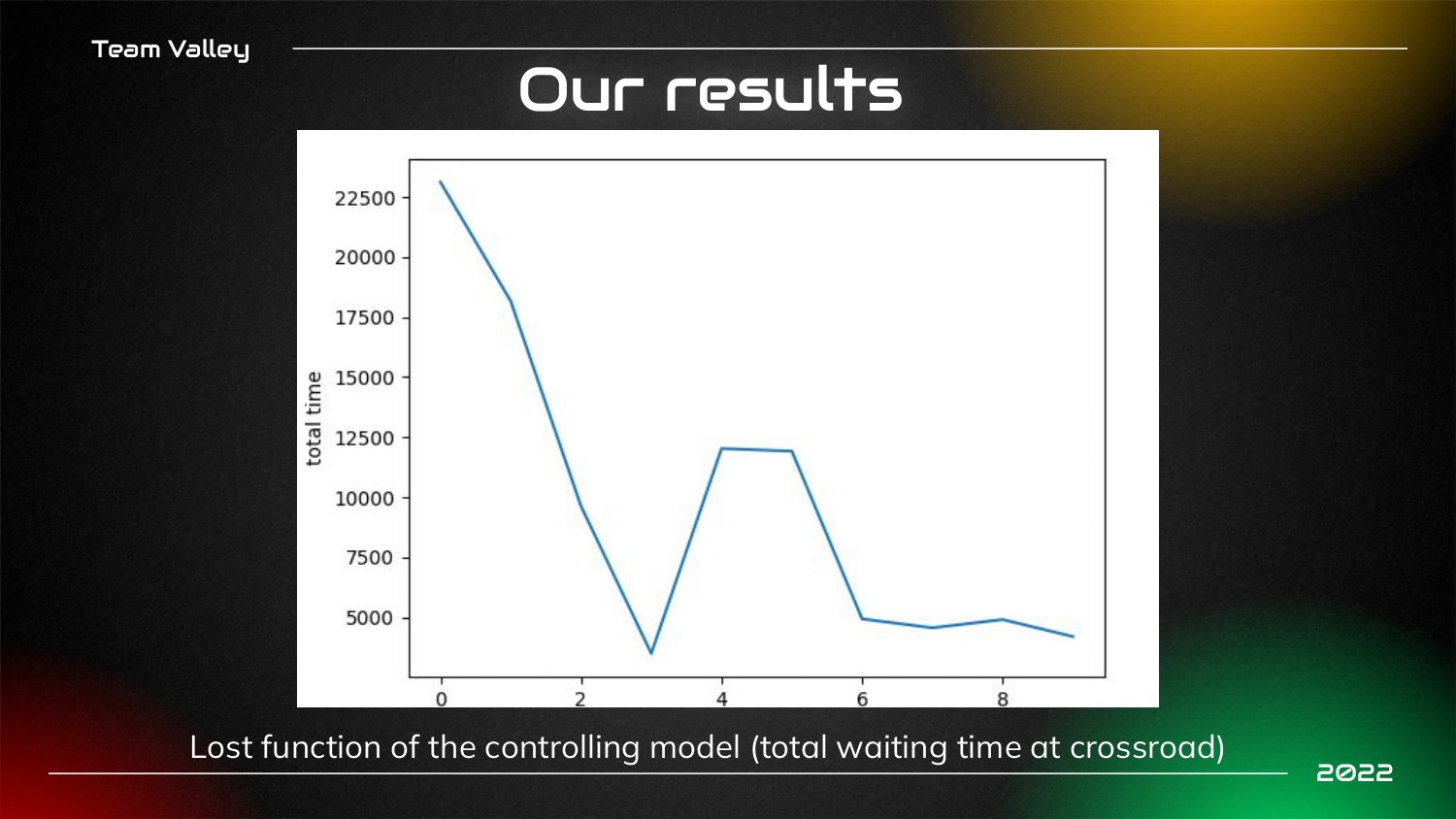
Firstly, for vehicles detection and tracking, we used the deep neural network approach to infer the traffic flow for all of 12 possible traveling directions at the crossroad. We referred to the paper "Zero-VIRUS: Zero-shot Vehicle Route Understanding System for Intelligent Transportation"[1], and used transfer learning to re-trained the model with our custom data set. Many models could perform vehicle detection, but we specifically chose this architecture for its additional abilities of tracking and calculating traffic flows reliably at crossroads. Secondly, to calculate the optimal green-light time for both sides of the crossroad we used deep reinforcement learning model. For the model, we built a Deep Q-Network that trained in the simulated environment. The particular problem of determining green-light time was a complex task with no clear-cut answer, where reinforcement learning is the most effective. The model was trained for 10 epochs with 200 steps. Lastly, we used Arduino to perform the traffic light system.
Challenges we ran into
- Having a model that track vehicles accurately.
- Hardware to perform Traffic Light Drivers.
- Perform only 9 fps but expect to perform 15 fps.
- Decision of machine learning architectures.
Accomplishments that we're proud of
- After retrain the model during 10 hours, we successfully track the vehicles at the intersection.
- Creating a minimum viable product and demonstrate it on hardware (Arduino - traffic light driver).
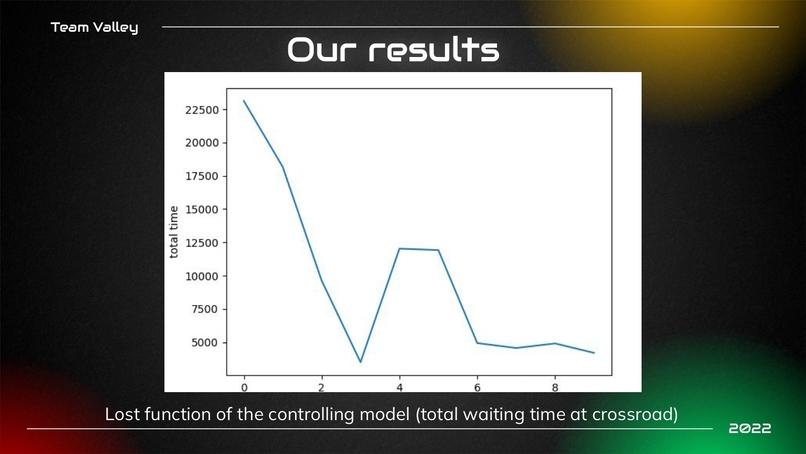
- Timing controlled by the traffic light is optimize to solve the real world problem.
What we learned
During more than two days, we have learnt a lot of things. Our team has gone through many discussions and workings to put on the best performance we could. We already estimated the challenge level of our project and faced so many problems but we never gave up and stuck to what we chose. At the end of day, we did not regret because what we gained were of more importance, our learning opportunities, teamwork, and the result paid off.
What's next for AATLaS - Auto-Adaptive Traffic Light System
In the future, besides vehicles tracking to calculate the traffic flow we will also utilize the emission calculation on each lane. We also want to develop the model to deploy on a larger number of junctions over a city and move towards a system that fully controls the traffic light over a city.




Log in or sign up for Devpost to join the conversation.