
Inspiration
We wanted to remake a childhood classic as well as explore applications of the Leap motion controller in robotics
What it does
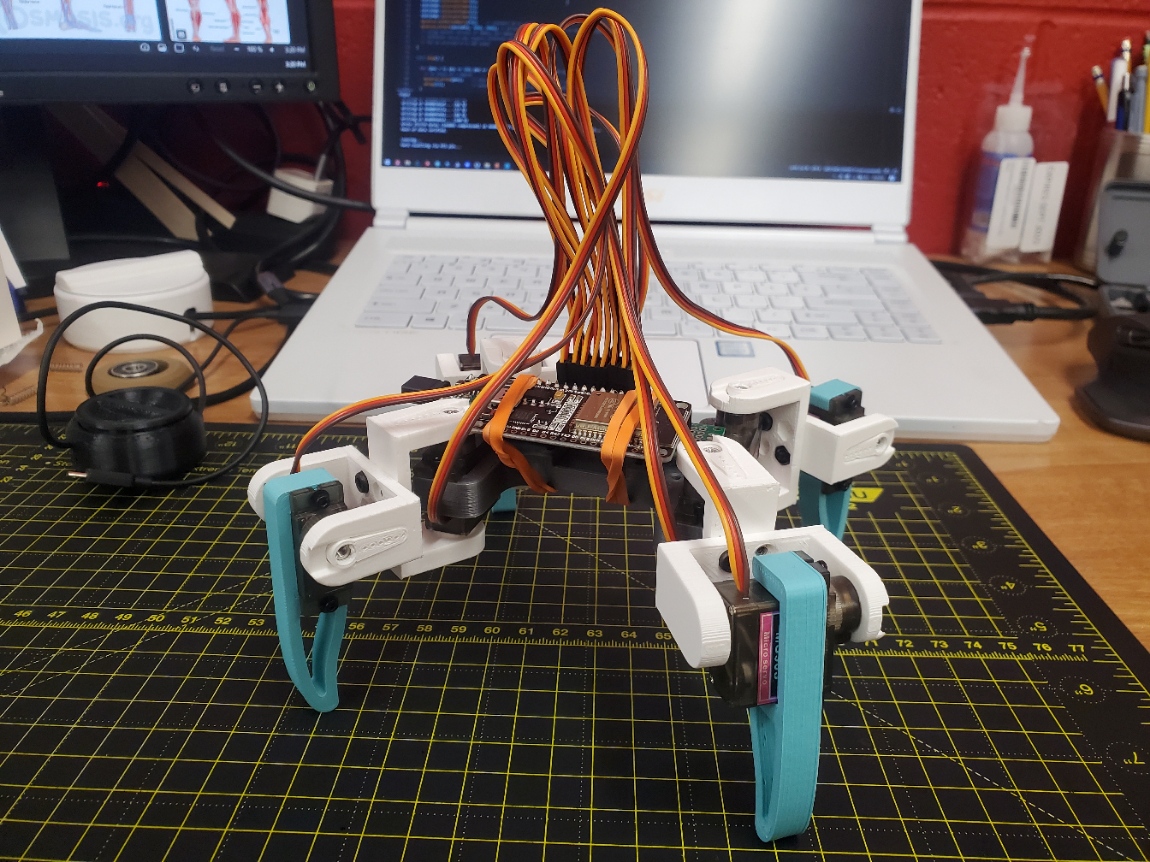
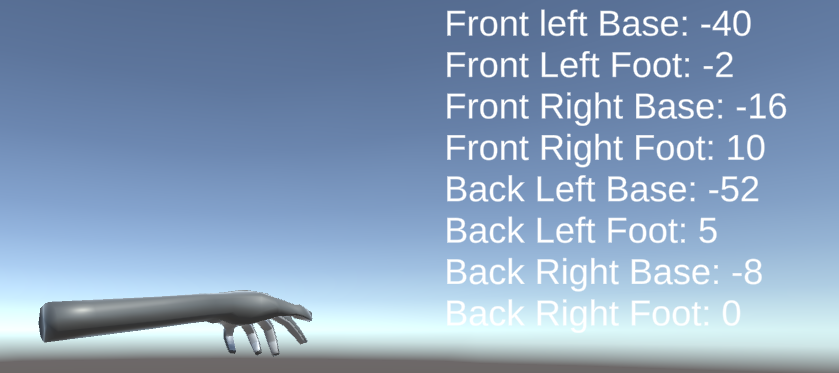
Attempts to map several finger joint angle data to the 8 servos on a quadrupedal robot
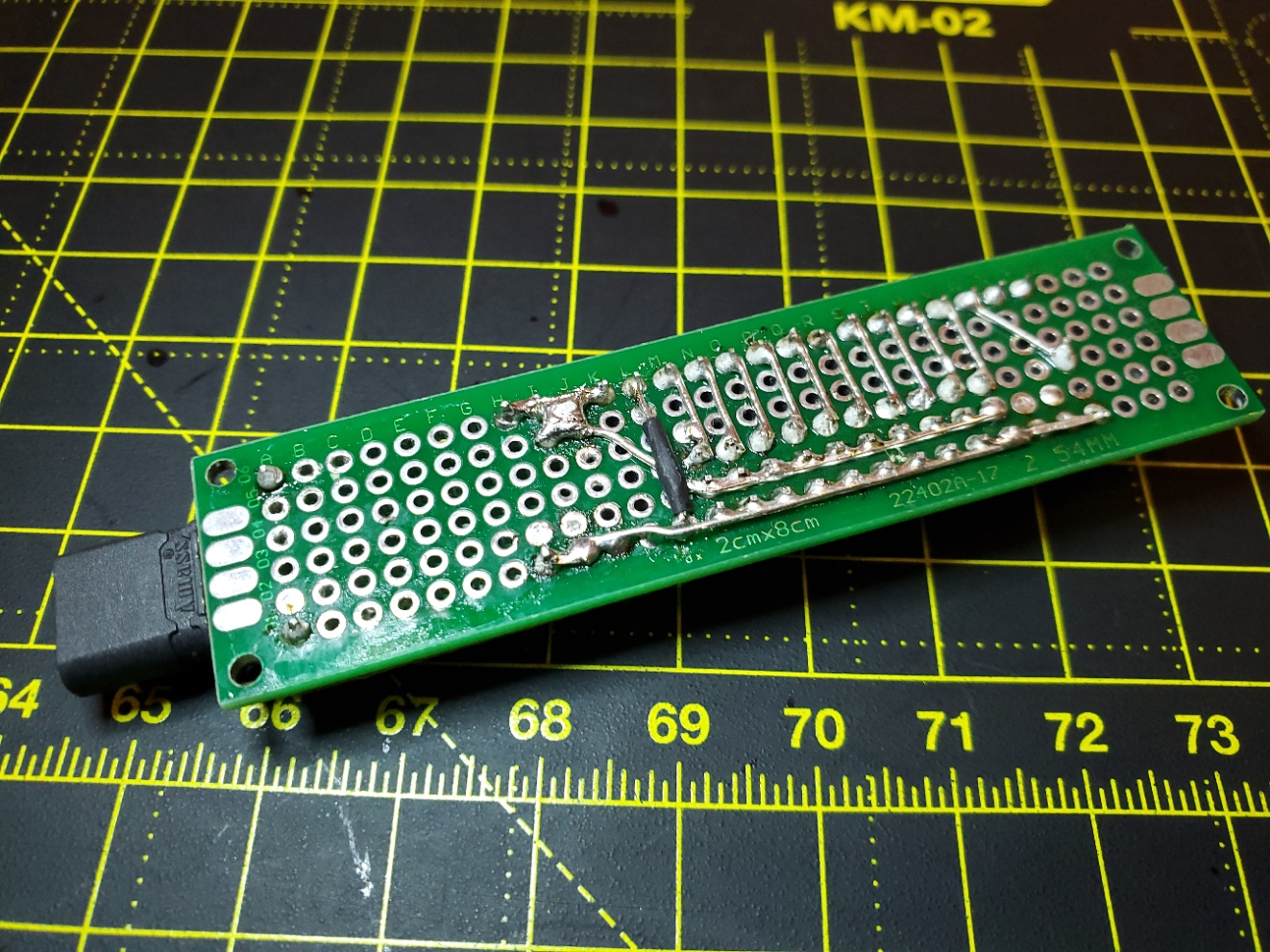
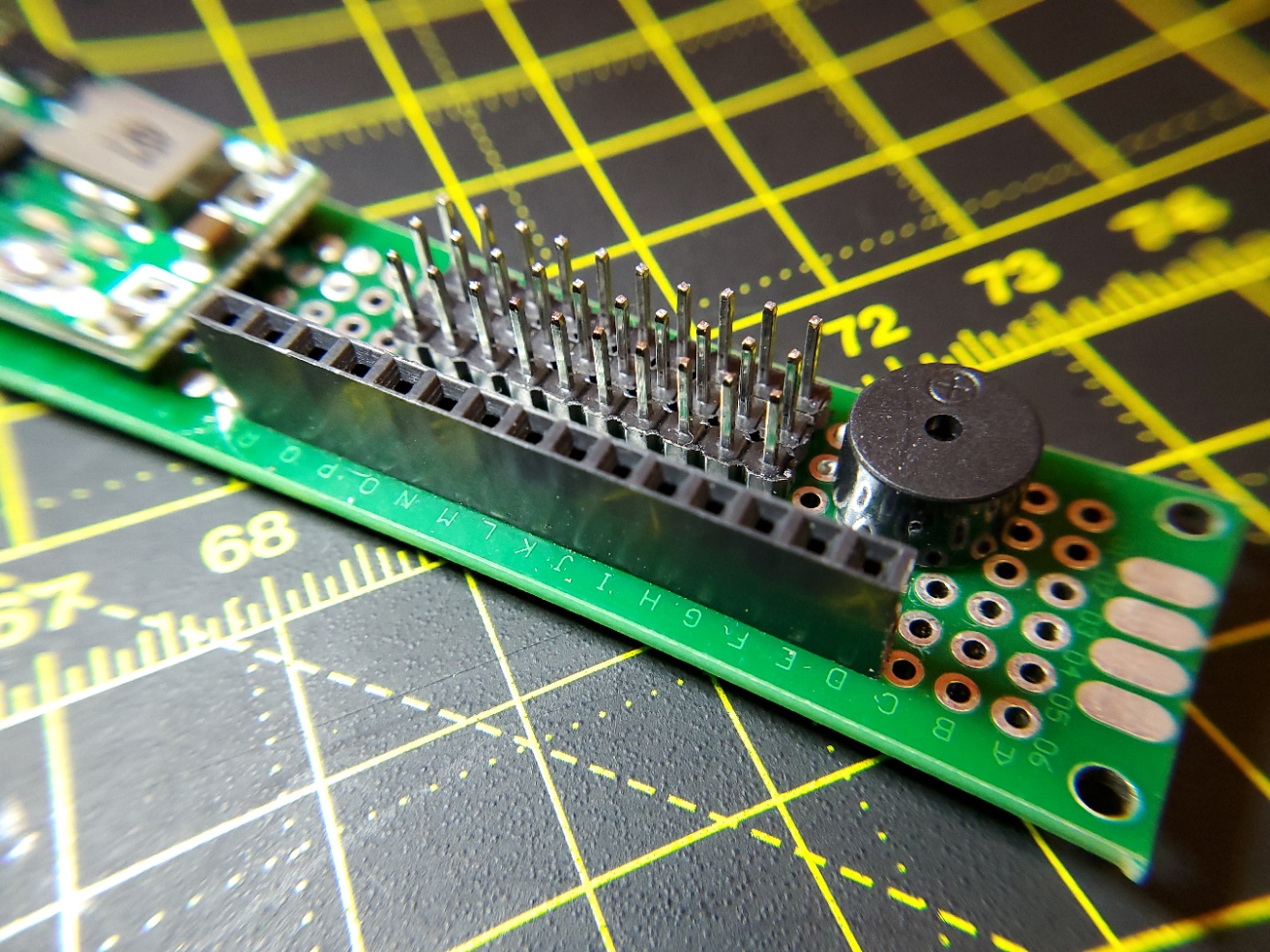
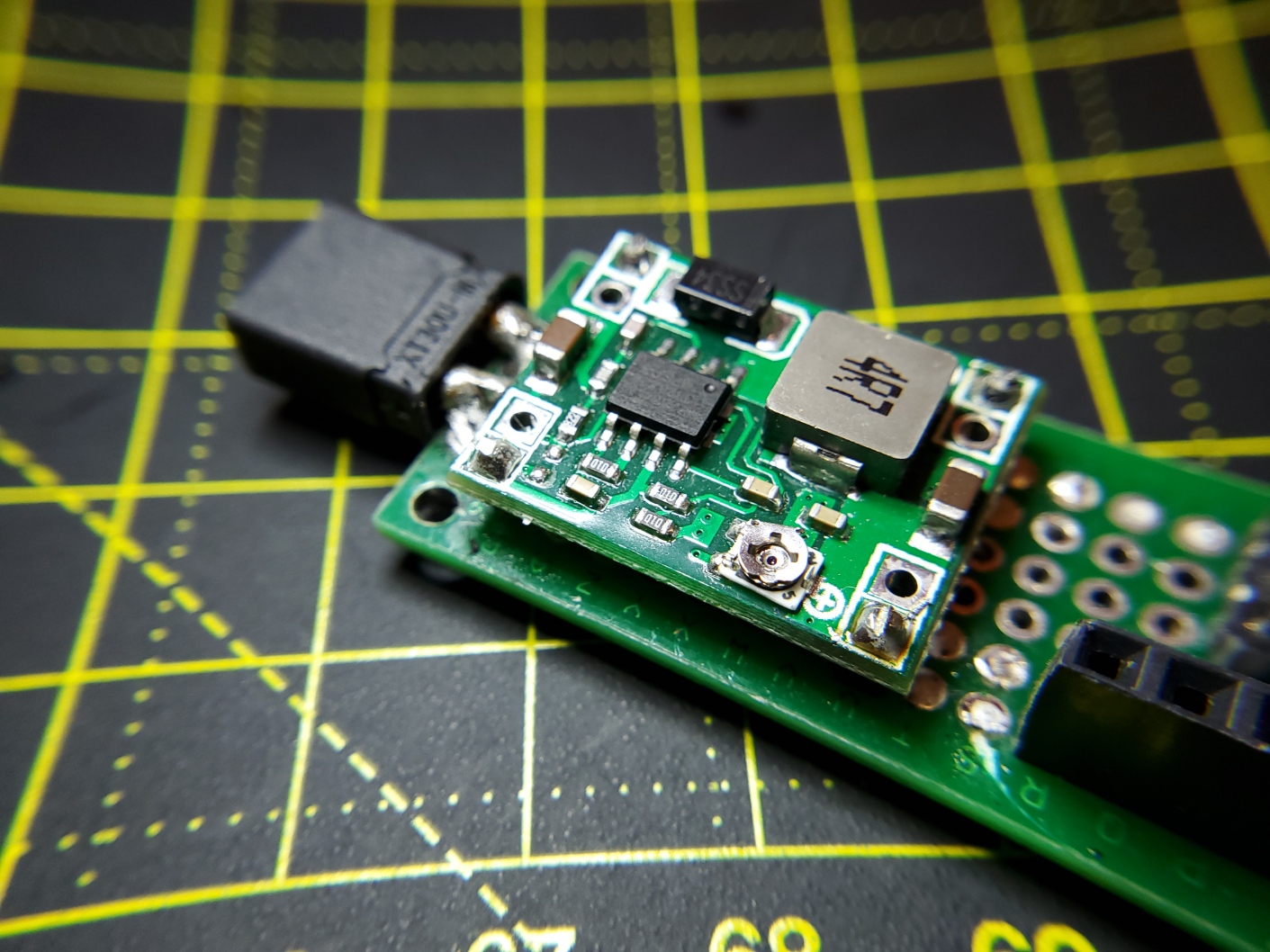
How we built it
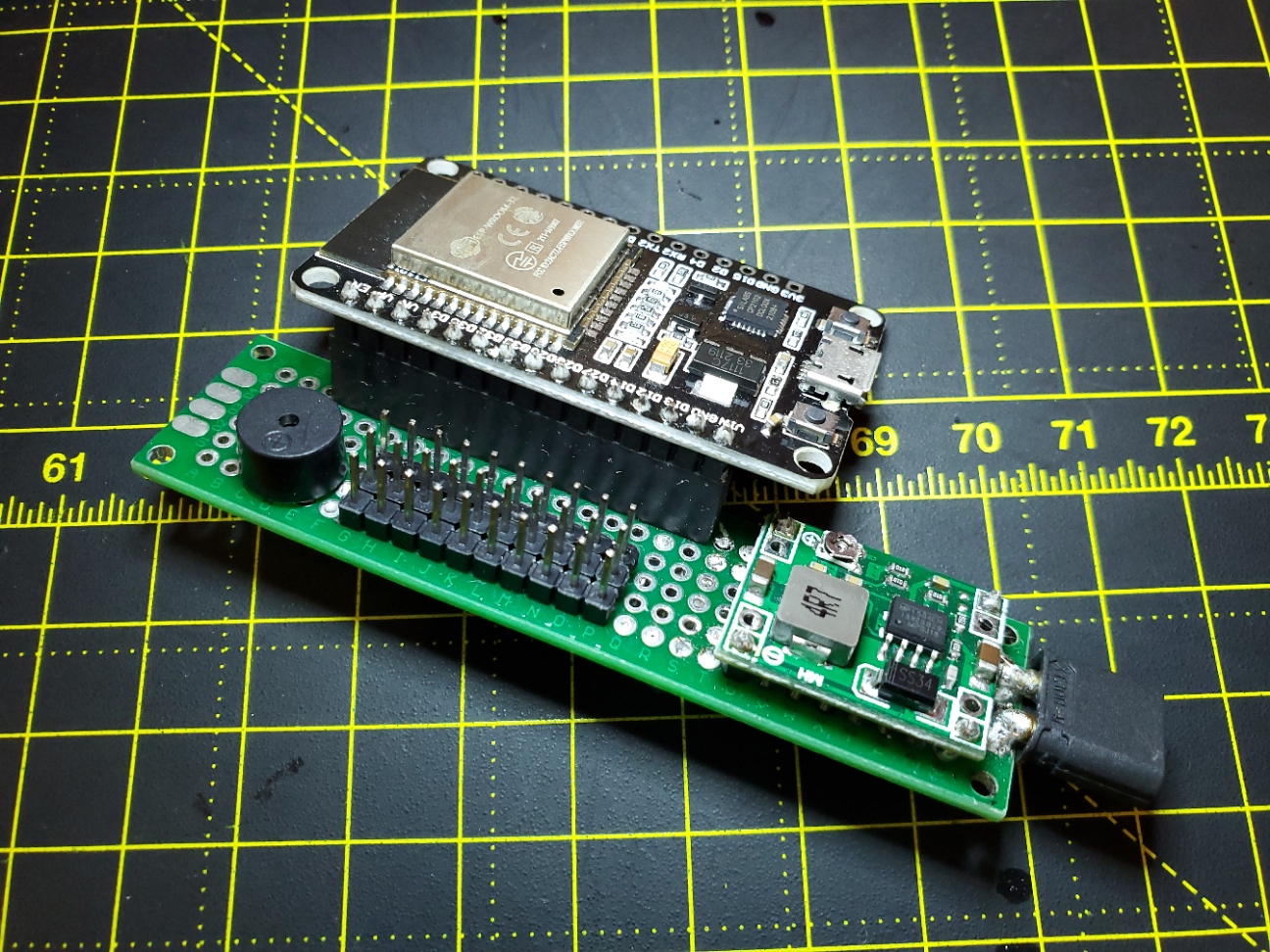
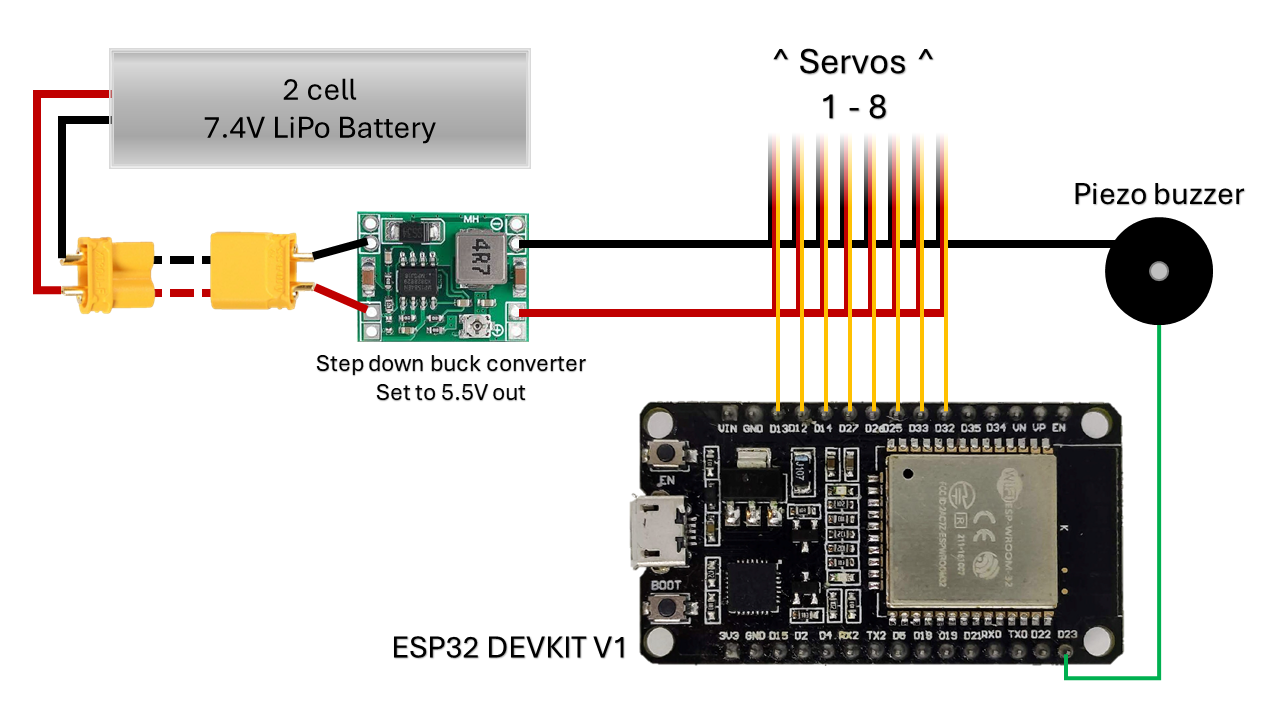
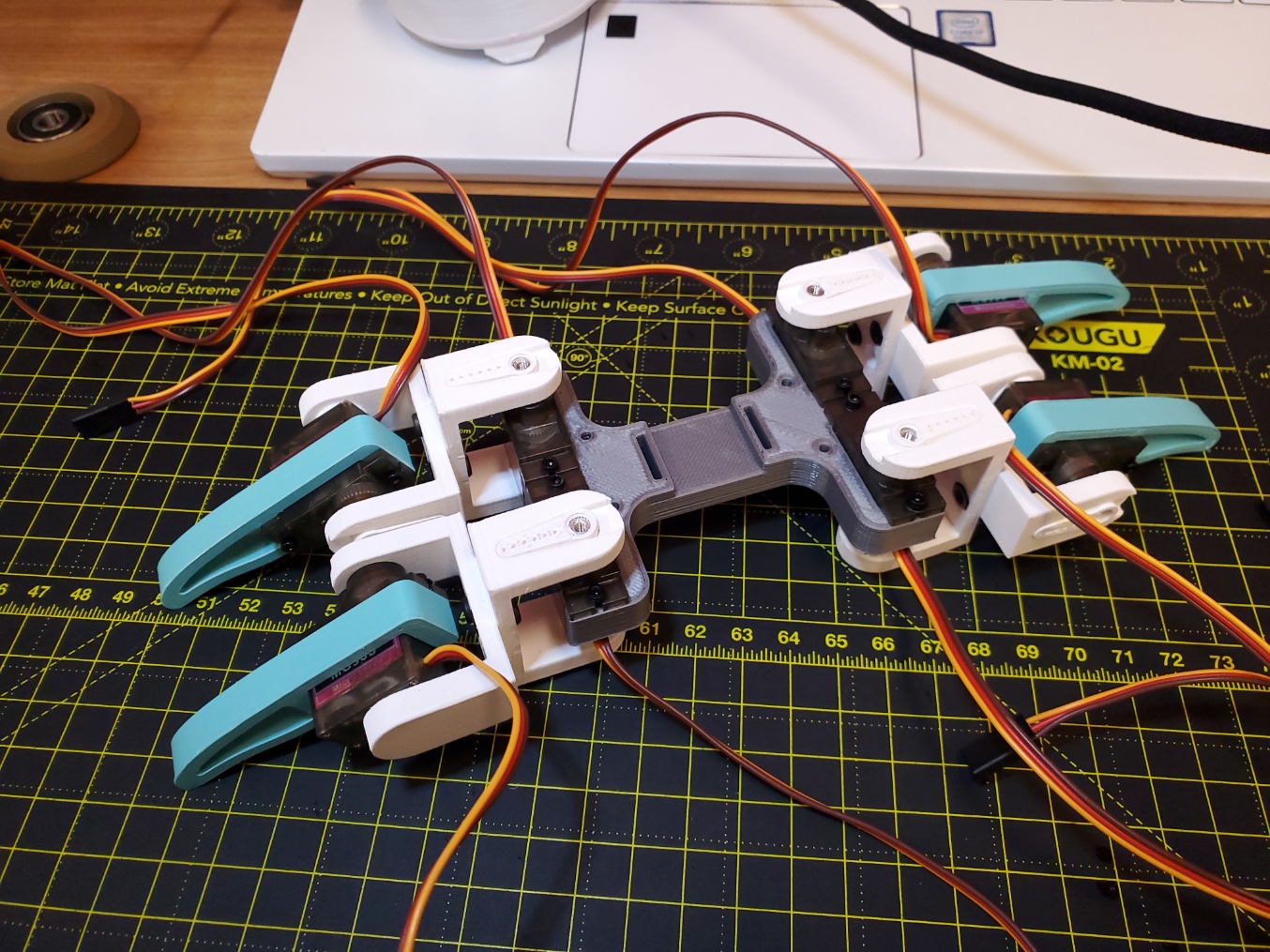
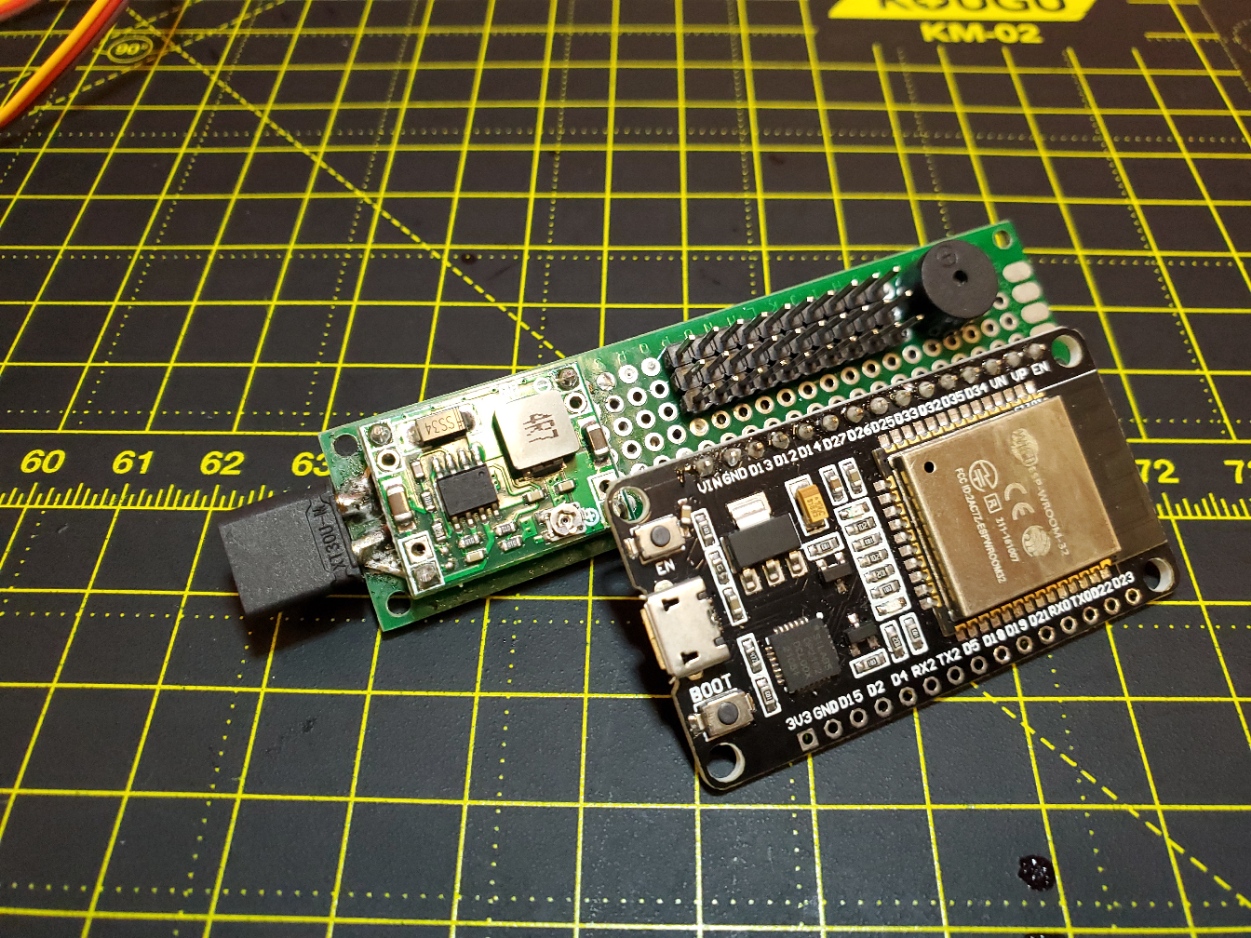
The robot was 3D printed and the circuit boards were soldered by hand
Challenges we ran into
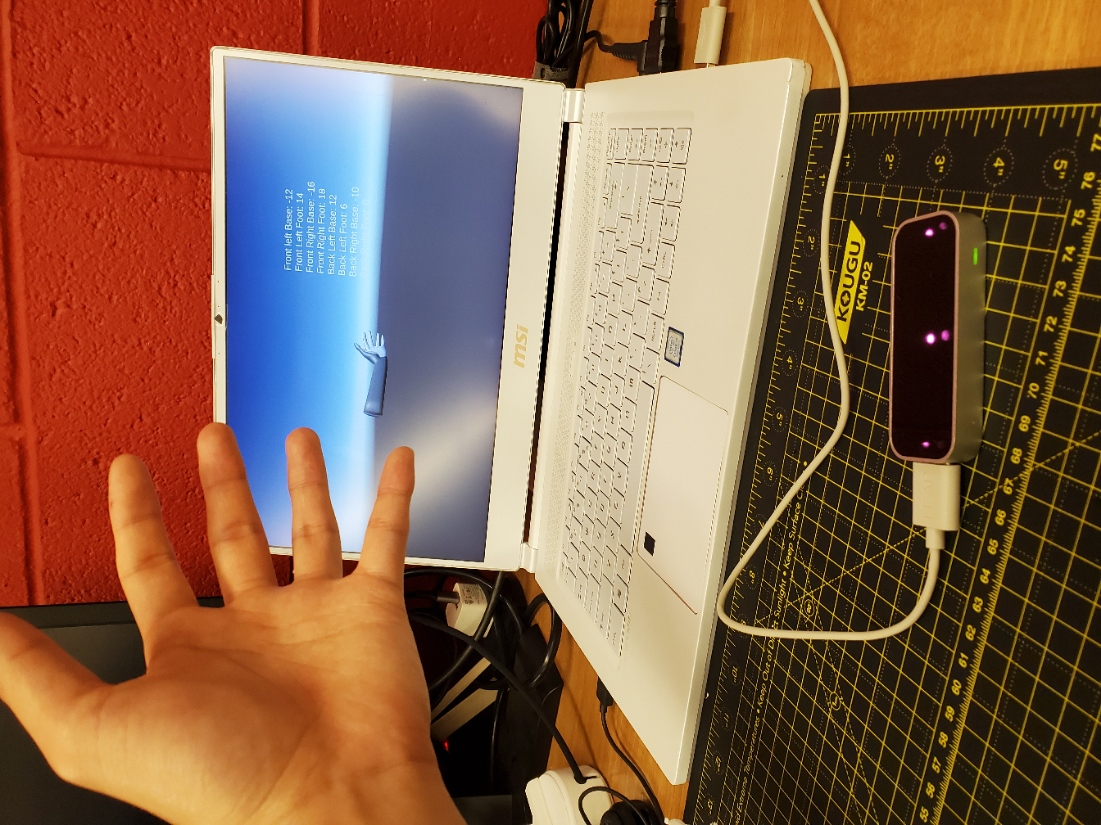
Using UPD to send the hand data from our unity game to the esp32. Both sides ran without sending any errors, but the message seemingly was never received.
Accomplishments that we're proud of
The robot is pretty cute and is fully functional on the hardware side
What we learned
Thumbs are weird and hands are complicated
What's next for TIMR - QWOP but WORSE
Get the data transfer working right, build an obstacle course, and have people attempt to beat TIMR





Log in or sign up for Devpost to join the conversation.