Every year hundreds of millions of birds migrate to and from their wintering and breeding grounds, often traveling hundreds, if not thousands of kilometers twice a year. Many of these individuals make concentrated movements under the cover of darkness, and often at high altitudes, making it exceedingly difficult to precisely monitor the passage of these animals. However one tool, radar, has the ability to measure the mass flow of migrants both day and night at a temporal and spatial resolution that cannot be matched by any other monitoring tool. Weather surveillance radars such as those of the OPERA and NEXRAD networks continually monitor and collect data in real-time, monitoring meteorological phenomena, but also biological scatters (birds, bats, and insects). For this reason radar offers a unique tool that has the potential to observe large-scale biological movements.
Using radar measures of bioscatter (birds, bats, and insects) researchers can begin to understand the distribution of migrants within the atmosphere; recording the density, speed, and direction of these movements. However visualizing these data products in a single, comprehensive manner has remained difficult. Given this challenge we worked towards an intuitive visualization tool under the guidelines of the 3-day ENRAM hackathon challenge. We developed a visualization that maps general bird migrations to illuminate behaviors unforeseen in previous radar visualizations.
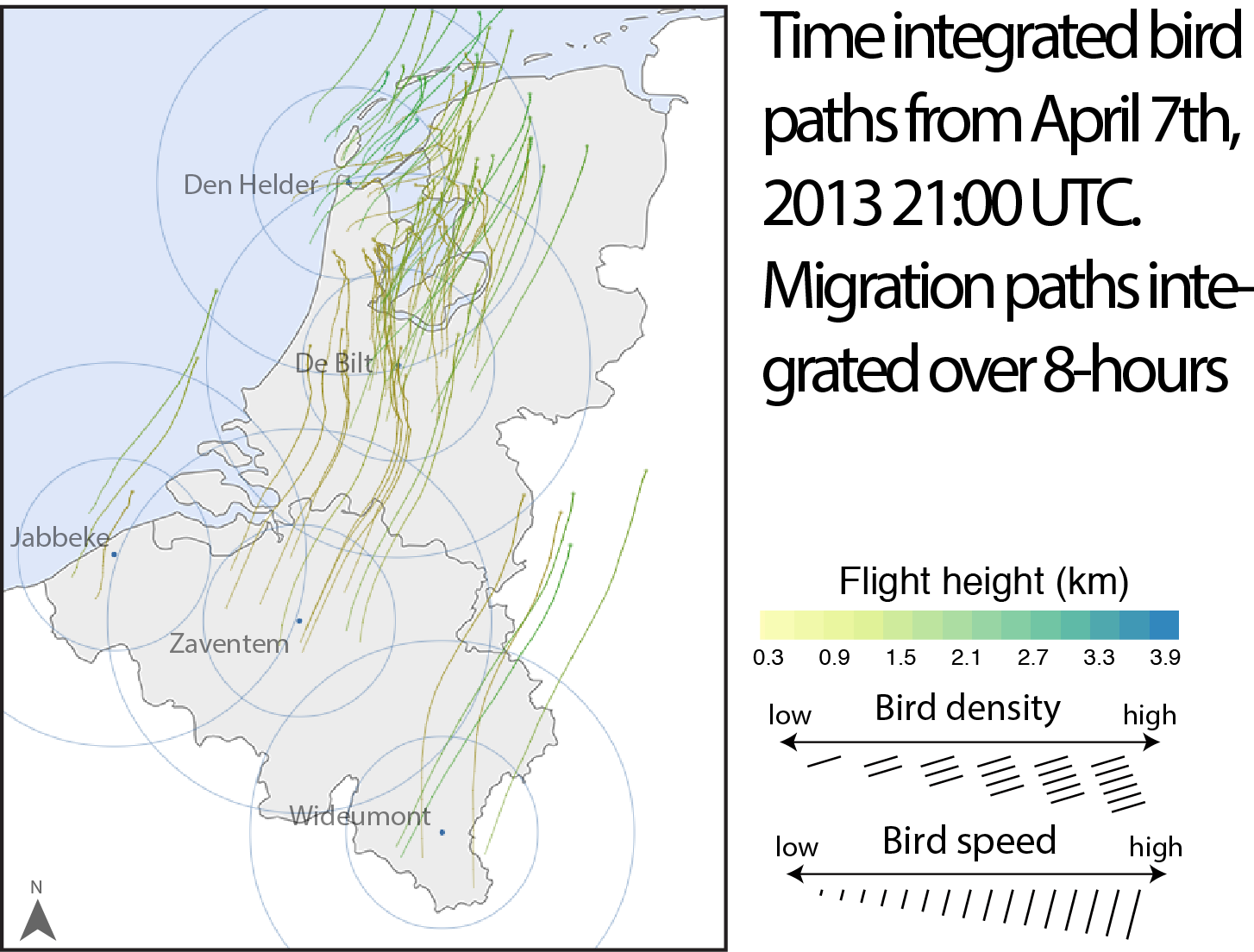
We've generated two different visualizations: 1) showing linear migrant paths and 2) time integrated migrant paths. In each of the visualizations data are from five radar locations from The Netherlands and Belgium; Den Helder, De Bilt, Jabbeke, Zaventem, and Wideumont. Our linear path animations depict general migratory patterns from radar measures interpolated across 20-minute time windows, at 5-minute intervals (i.e. rolling average). Line color indicates height of observation (0.3-3.9 km), density of lines reflective of bird density (birds km3), line length reflective of ground speed (m/s), and direction of line segments the average track position (degree). All lines are initialized from random positions within the radar domain (radius 100 km), and regenerated for every interval. Our time integrated visualizations display path integrated movements with relative density measured approximately 1-hour after local sunset, and paths projected 8-hours after initialization.


Log in or sign up for Devpost to join the conversation.