-
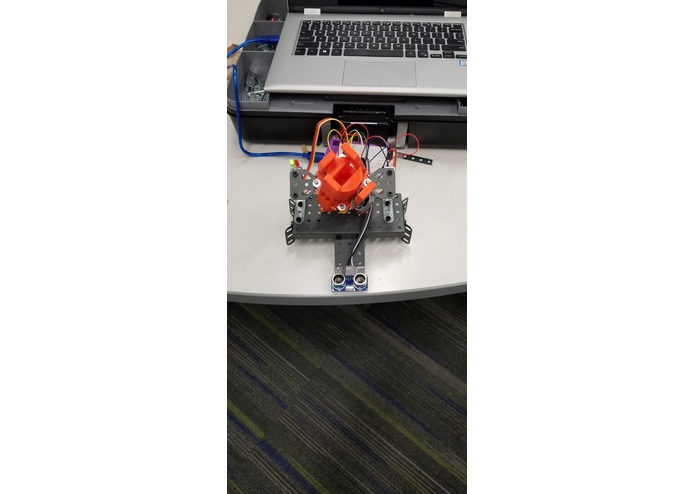
A Helping Hand holding a 3D-printed cylinder.
-
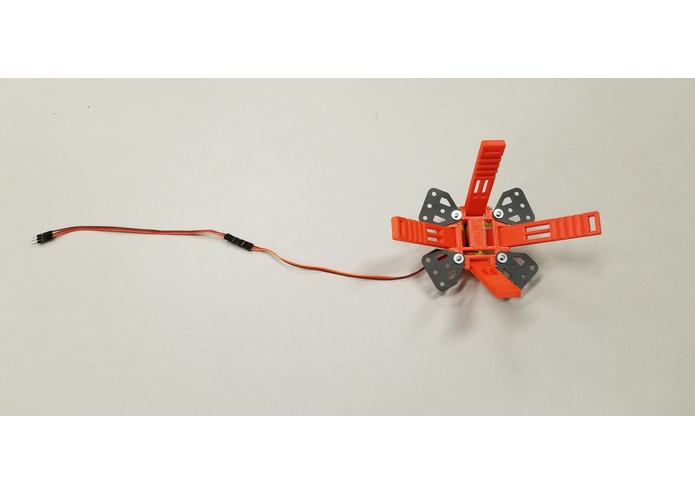
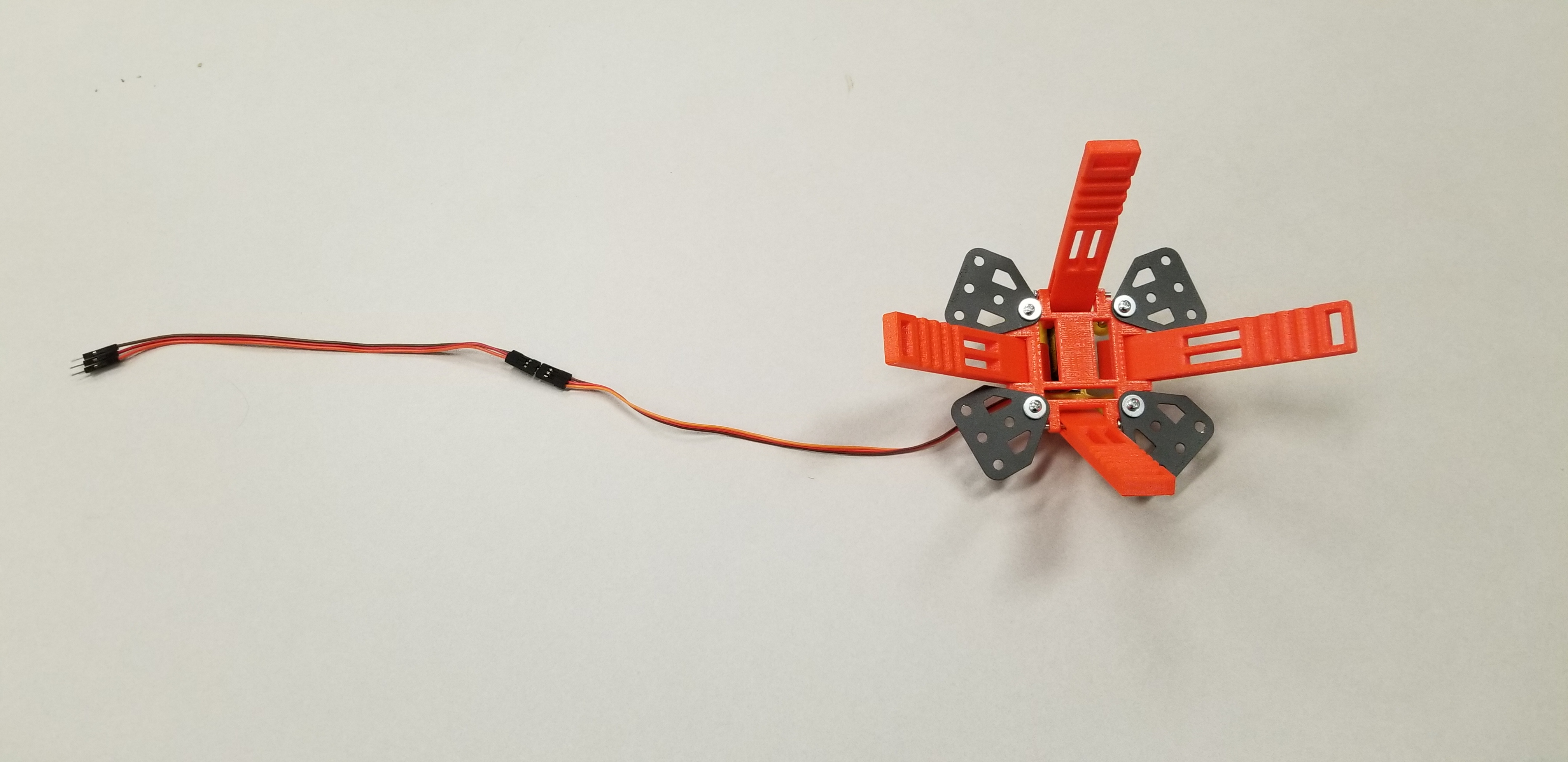
The grasper of the system.
-

A mechanism that created a twisting action that allowed grasping with only one servo.
-
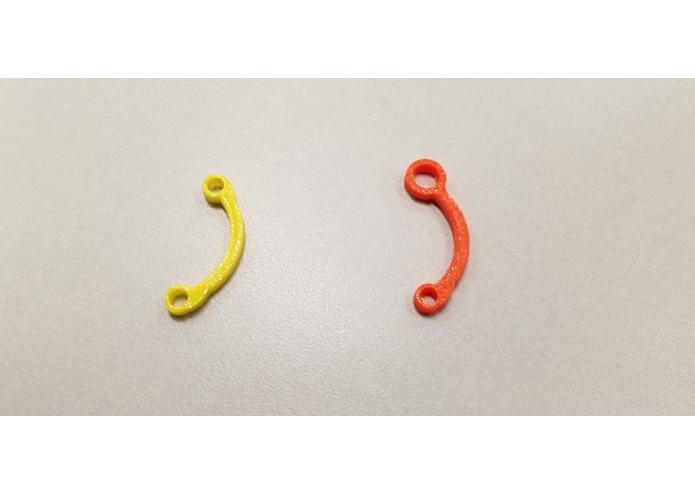
Two versions of the same component –– one faulty (left), one not (right).


Inspiration
Whenever you carry things or are holding many items at once, it can be frustrating having to hold all these things without being able to put them down or have someone else hold them if no one else is around. If only there were some place to quickly set something until you can grab it and keep going. Enter A Helping Hand, an auxiliary grasping device.
What it does
This device provides that extra hand in the phrase "Give me a hand!" by being able to sense, grab and hold onto anything you give it. All the times that our team was carrying many bags or couldn't set something down to pick up something else could have been solved by A Helping Hand, making it so important that we created it and invested time in building this solution to a universal problem.
How we built it
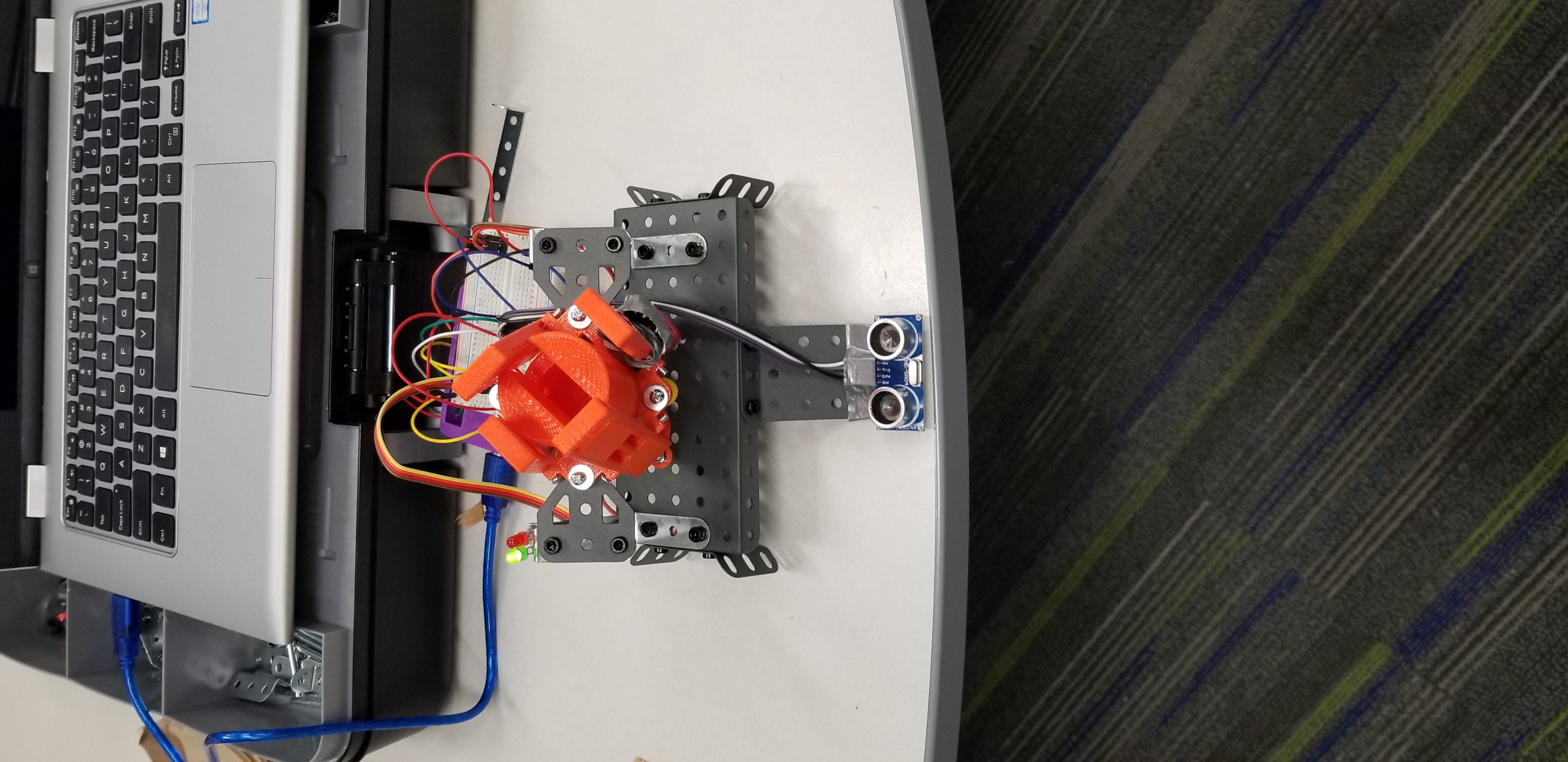
We first brainstormed ideas for mechanisms and structures that would allow us to create the most useful device with the least amount of power and servos. We then designed and 3D-printed all of our components while simultaneously designing software that would relate the input of an ultrasonic sensor through an Arduino chip to the output of a single servo that would give the power for a grasping motion with four phalanges.
Challenges we ran into
Multiple times the 3D-printed components were too small, too large, did not fit correctly or were flimsy. This forced us to reprint modified versions of multiple components several times. In addition, creating a reliable program that would produce a smooth relation between the continuous input of the ultrasonic sensor and an accurate and discrete output by the servo required hours and hours of brainstorming and modification.
Accomplishments that we're proud of
That we were able to get past both of the above challenges and create a functioning robotic grasper whose structure and components we designed and assembled. In addition, that we were able to do all this as only a two-person team.
What we learned
How to program effectively in Arduino's C++ variant, use Onshape, the online CAD software tool and assemble an electronic system that had sensory inputs, motor outputs and can produce productive human-robot interaction.
What's next for A Helping Hand
Being able to reach up and around to provide more interaction on the side of the robot in the relationship between it and humans, being able to be stuck onto any surface to hold objects and even acting as tool-holding assistants for technicians, artists, architects and even surgeons. No more must a he or she call to a nurse "Scalpel!". Now he or she need only ask, and from A Helping Hand they shall receive.
Built With
- arduino
- onshape

Log in or sign up for Devpost to join the conversation.