Inspiration 💡
The inspiration behind our project was driven by the need to address the challenges and risks associated with dangerous tasks that humans often face, such as firefighting or inaccessibility to surgery. These activities involve hazardous environments where human presence can be life-threatening. By utilizing a computer-aided vision system in conjunction with a robotic arm, we sought to create a solution that can perform these tasks with precision and efficiency while keeping humans out of harm's way.
What it does ✅
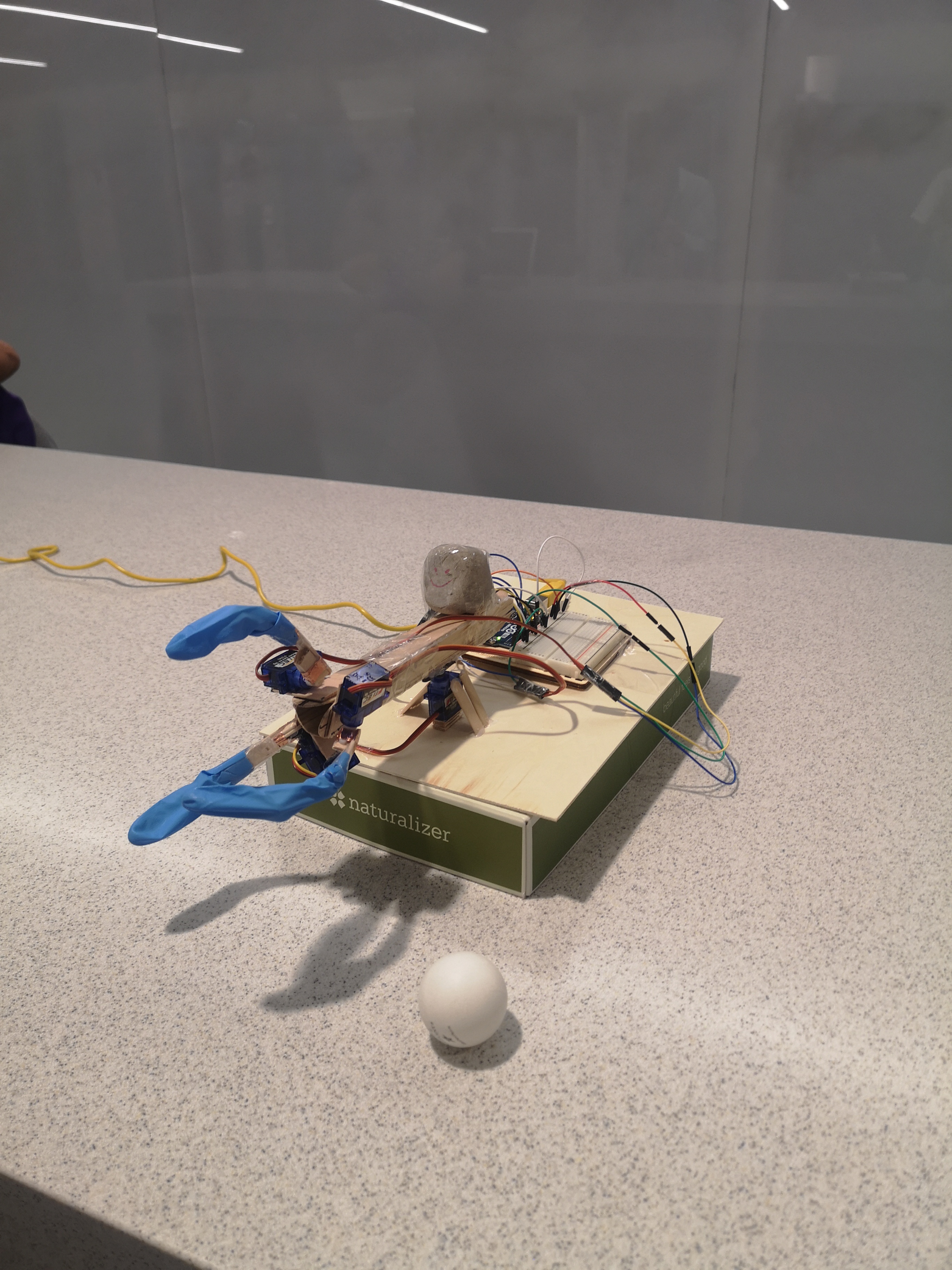
The helping hand is essentially a hand which helps people from afar. It uses computer vision which maps out the points on the user's hand and then translates that information in the robotic arm. It uses servos to accurately and precisely mirror the user which helps maintain consistency and efficiency.
How we built it 🛠
We built it using OpenCV and Arduino where the computer sends a value to the Arduino depending on the location/joints on your finger. This is then used to determine the angle on the servos to accurately move and grab things.
Challenges we ran into 🚧
Challenges we ran into was mounting the arm on the servo, it was a lot of weight to handle on a small motor. We also accidentally broke one of our motors when we were about to finish up which left crying trying to troubleshoot this problem at 4 am. The arm would keep spasming and we struggled to find a root why, we eventually resolved this problem and left us empty as we had 2 hours of sleep left.
Accomplishments that we're proud of 🏔
For many of us, it was our first time working with OpenCV where when it finally worked we were ecstatic. The whole project was really fun to make, seeing our innovation work in full glory was truly worth the 2 hours of sleep this weekend.
What we learned 🎓
We've learned a lot throughout this hackathon, from computer vision to assembling hardware it was a treacherous journey for all. We've learned how important sleep is as it can totally affect your mood and productivity throughout the day, we should all be grateful for the amount of sleep we get outside of hackathons and appreciate it while you can.
What's next for the helping hand ➡️
The next steps for the helping hand is to provide more functionality on the robot arm itself, we are planning to expand on a 3d axis where it can move forward too. Once we can create a more functional arm, we are planning to broaden my helping hand and ultimately create a helping friend.










Log in or sign up for Devpost to join the conversation.