-
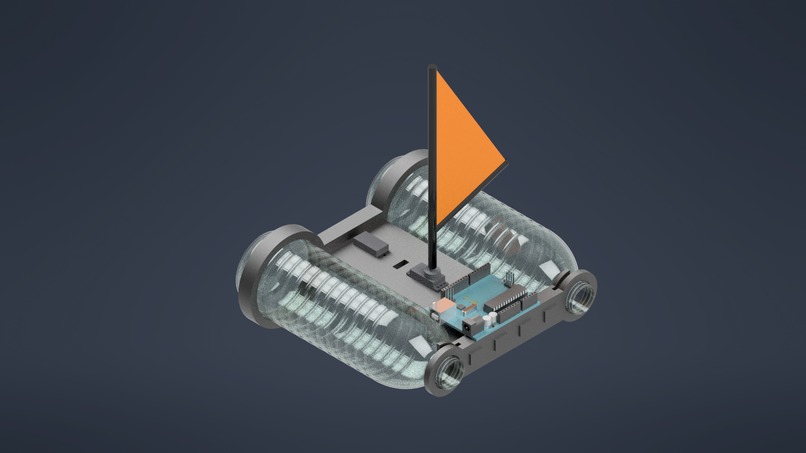
Our CAD rendering of the Slick Sailor (See a Video of the real thing in action in the linked Slide deck)

A Slippery Problem
The world runs on oil. Though it would be amazing for the environment and global sustainability if this was not the case, unfortunately it is the reality and will be for a while. Oil production creates greenhouse gas emissions, but spills also cause major environmental damage. Oil spills however are largely forgotten, until they become a massive problem, but by then it is far too late.
The Answer
Because oil spills are often undetected until they have become a large problem, we realized that there was an opportunity to make a massive difference in the environment's sustainability if we developed a way to catch spills quickly. We realized that one way to do this was to have a swarm of sailing bots that sensed for oil slicks on the surface of the water. Once an oil slick was detected, it the bots would alert a central system about the spill. Because of the swarm we would be sure to catch any oil spill quickly, which would allow response before large environmental damage was caused.
An Idea To A Bo(a)t
We started with our idea of swarm of oil slick sensing robots and realized that the first constraint of our design was the scalability - in other words we need an inexpensive and mass producible robot. In addition we realized that in order to help the world be more sustainable, we needed to incorporate recycled material into our bots. Under those constraints we settled on a catamaran style sailing robot built of 3D printed material and recycled water bottles. We decided it would use an Arduino base for sensing, as that is one of the cheapest sensing platforms available.
Then it was time to design the most important part: how we would detect the oil slick and alert a central system. Looking into sensors - we decided that using a light sensor and LED would allow us to detect easily and cheaply when the bots encountered an oil slick. Then we would send an alert by activating a siren, which would emit a frequency not replicated on the open ocean making it very easy for a central system to detect from a long range. From here we took our design to a physical circuit, and wrote the program that dictated how the bot would search and react to oil slicks.
Lastly, we needed to design the platform for the boat. We decided on a simple sail and rudder design, which has been proven to be effective for hundreds of years. Then we set about using CAD software to design a base which would integrate all sections of our boat, which we then 3D printed.
A final assembly of our components and we had our working prototype of a Slick Sailor!
A Future Voyage
The Slick Sailor is a great first step, however before deployment there is a way to go.
The first upgrade we need is to add a solar panel. The Slick Sailor currently runs off of a Micro USB, but to be autonomous, this would need to be replaced by a small solar panel. We have identified multiple candidates for this which provide the required voltage at amperage below $15. The second upgrade needed is waterproofing. Currently our boat should work, however in order to brave inclement weather, it would need additional waterproofing. A final upgrade is to refine the sail, rudder, and sensors. Our current version has suboptimal versions of the sail and rudder as we did not have time to optimize for the bot size and conditions. Additionally, we would need to do further testing to see if our sensing technique was the best, or if a water sensor or color sensor would perform better.
In addition to the upgrades needed, we would need to develop the central sensing system. We used a sound pattern as an alarm that does not occur in open water, so it would be easy to sense from far away. However, we would need to make this central system, which would alert responders if the swarm detected a spill. Additionally, in this design we would want to consider other cheap yet easy to sense alert systems such as a blinking infrared light.
The final step to taking this to deployment would be to develop an effective search algorithm. We started this process during the weekend, making a physics simulator that could track boats. However, we did not have time to develop the machine learning algorithm that we plan to use to refine the search pattern of our bots.
Thanks to Cornell Maker Club for providing hardware and Big Red Hacks for the overall support in this project!











Log in or sign up for Devpost to join the conversation.