-

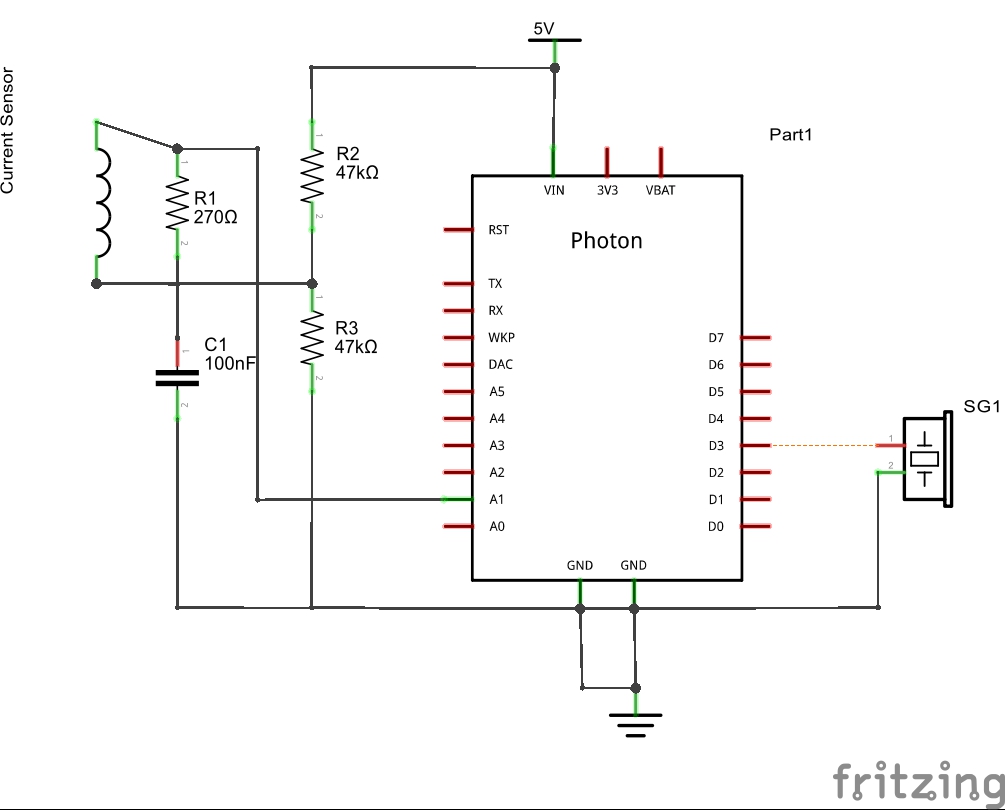
Schematic Vers. 1
The Safe Kitchen
Inspiration
Hardware for a Safer Life
Over 162,000 Home fires every year in the U.S. involving cooking equipment - National Fire Prevention Assoc. (NFPA)
Ranges account for greater than 60% of the fires, and 86% of the deaths!
Unattended equipment is the leading cause
What it does
OvenOn:
Embedded system to detect and alert users of appliances left on!
Web Application for data logging and user messaging
How we built it
Embedded System - Photon Particle, Sparkfun clamp-on current sensor (transformer)
Web Application
Ruby on Rails on private server
Mandrill e-mail services
Challenges we ran into
Nonexistant/Poor pinout documentation for some components
Not developing with a real oven/stovetop during the Hackathon
Apple MacBook Pro Graphics Card failures during Web App Development
Accomplishments that we're proud of
Building a strong/talented team --Jim Beck --C Cantello --Jim Cifarelli --Eric Robrigado
What we learned
Photon programming
Resources offered by the Center of Gravity
What's next for The Safe Kitchen
Next Generation Project The Smart Spoon Rest -- added sensors, advanced detection/alerting algorithms
Built With
- photon-particle







Log in or sign up for Devpost to join the conversation.