Inspiration
This project was inspired by the challenge of creating autonomous robots capable of navigating complex environments. The assignment provided an opportunity to apply theoretical knowledge to practical scenarios, pushing the boundaries of robotics development.
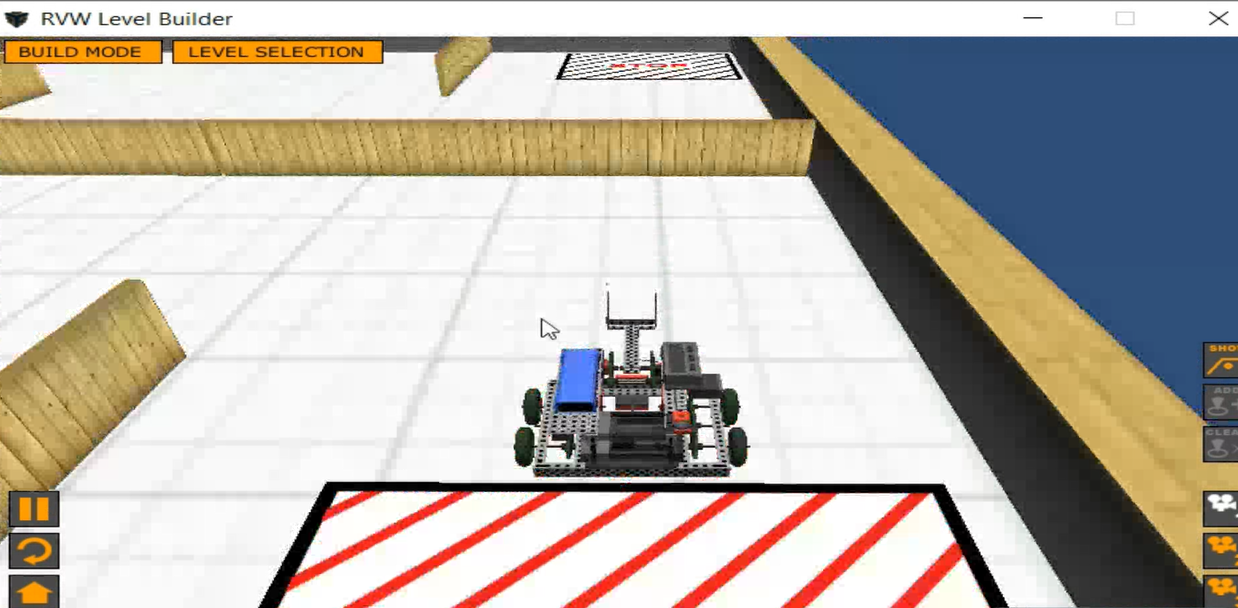
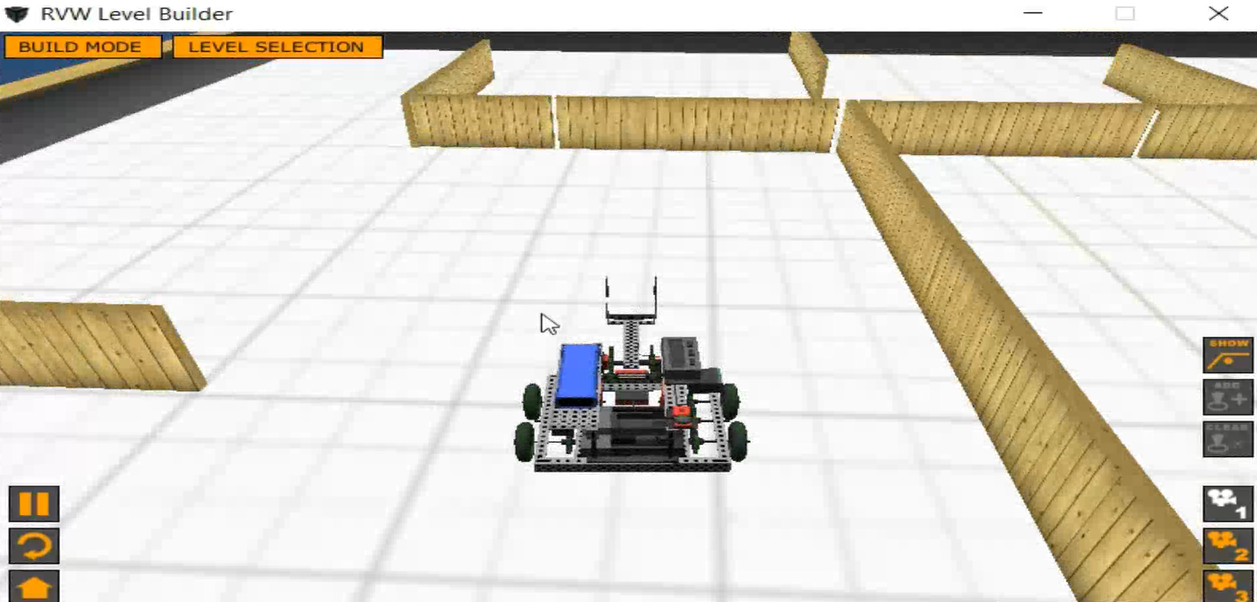
What it does
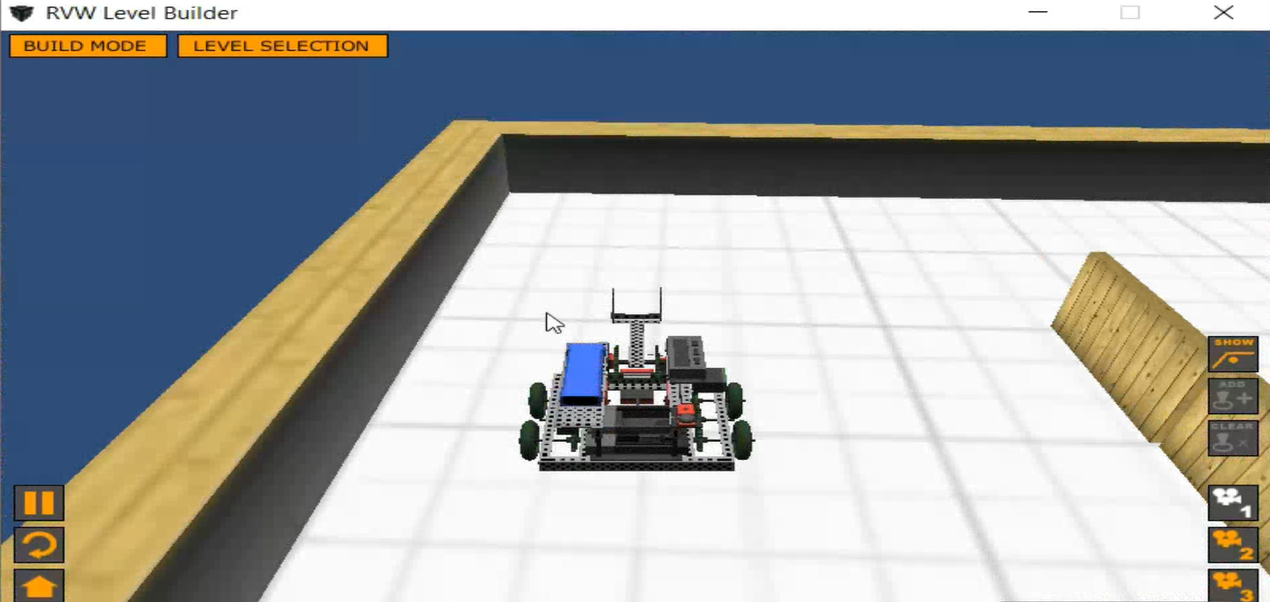
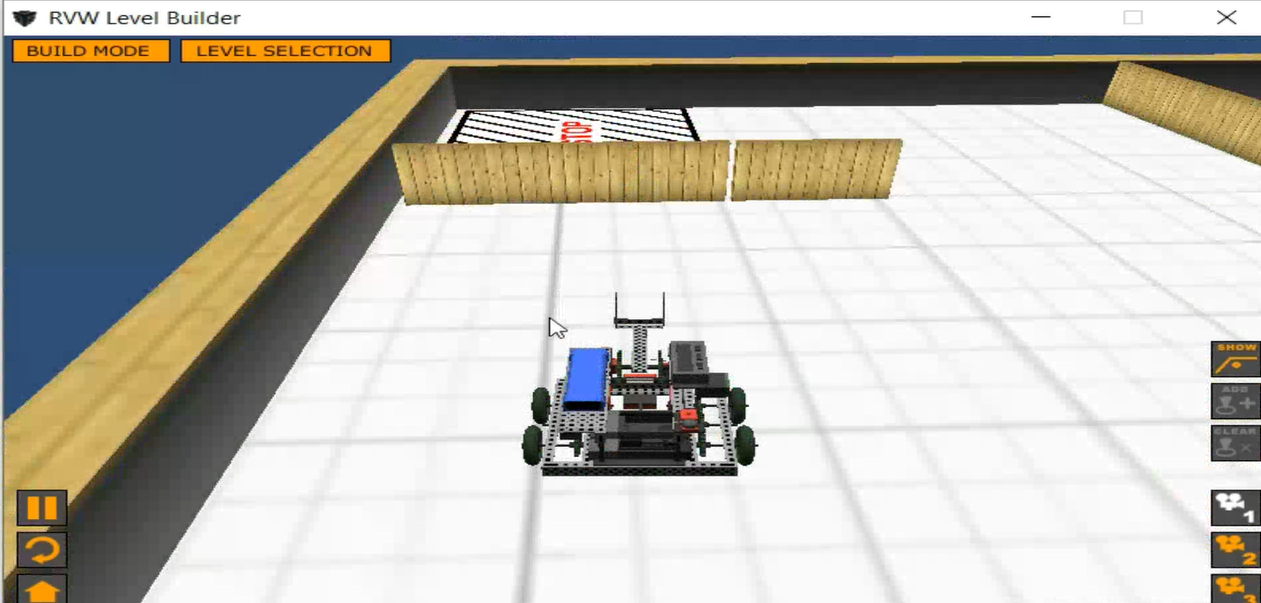
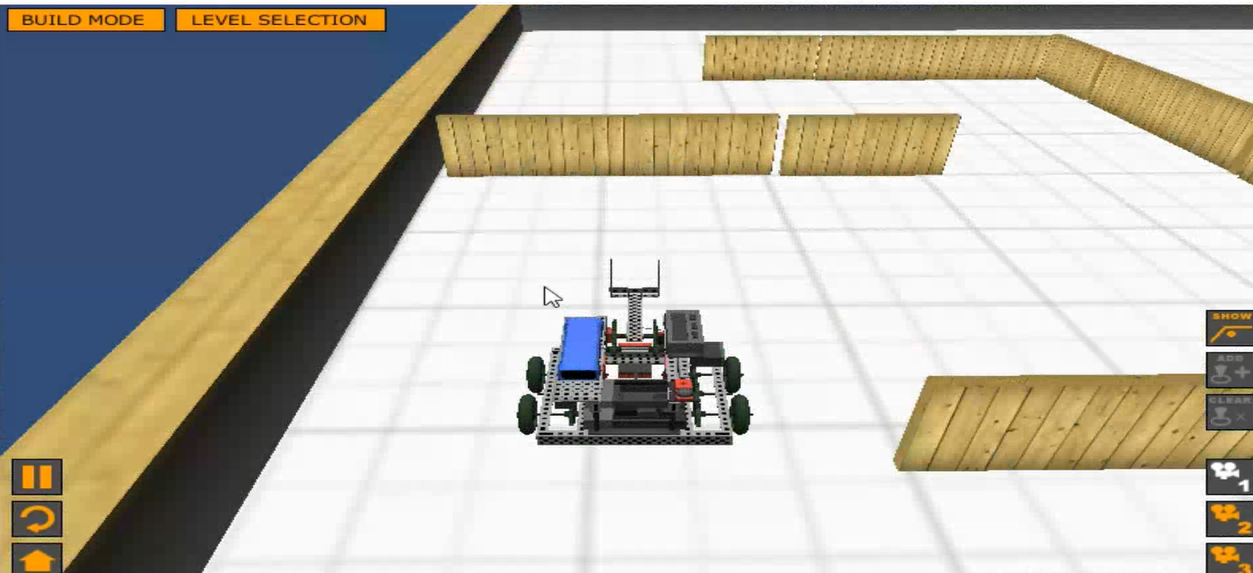
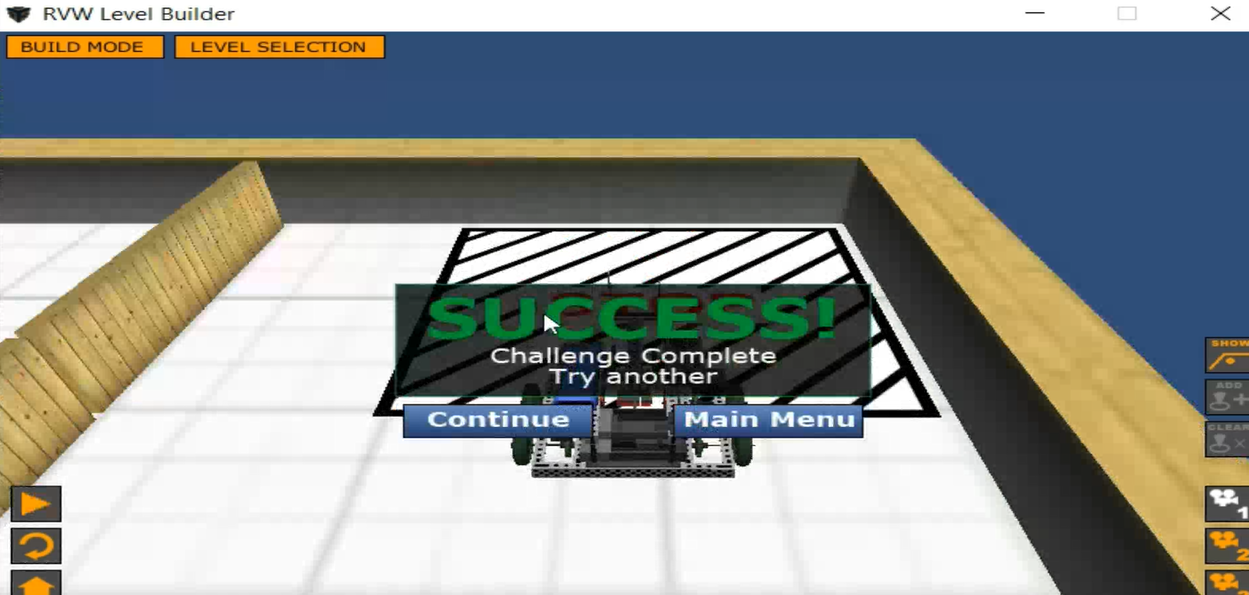
The Robotics Project showcases simulated robots performing key tasks:
- Line-Following Simulation: The robot is programmed to follow a virtual line on the simulator, maintaining its path with precision.
- Maze Navigation Simulation: The robot autonomously navigates through a virtual maze, utilizing pathfinding algorithms to reach the goal.
- Obstacle Avoidance Simulation: The robot detects and avoids virtual obstacles in its path, dynamically adjusting its movements to navigate around them.
These simulations demonstrate the capabilities of the robots in a controlled virtual environment, using RobotC to test and validate the algorithms without physical hardwar
How I built it
I built the robots using a combination of C and RobotC. Each robot was designed to accomplish specific tasks: following lines, navigating mazes, and overcoming obstacles using sensor data and programmed logic.
Challenges I ran into
One of the biggest challenges was fine-tuning the robot’s decision-making processes to ensure accurate and efficient navigation in real-time. Debugging the code and calibrating the sensors to work effectively in different environments were also key challenges.
Accomplishments that I'm proud of
I'm proud of successfully developing and programming simulated robots using RobotC. This project involved creating sophisticated algorithms that enabled the robots to autonomously follow lines, navigate through mazes, and avoid obstacles. The achievement lies in effectively simulating complex robotic behaviors and refining the algorithms to work seamlessly in a virtual environment.
What I learned
Throughout this project, I learned how to integrate various sensors and actuators with microcontrollers, how to develop algorithms for real-time decision-making, and how to troubleshoot and refine our designs based on performance.
Built With
- c
- robotc
- ros



Log in or sign up for Devpost to join the conversation.