-
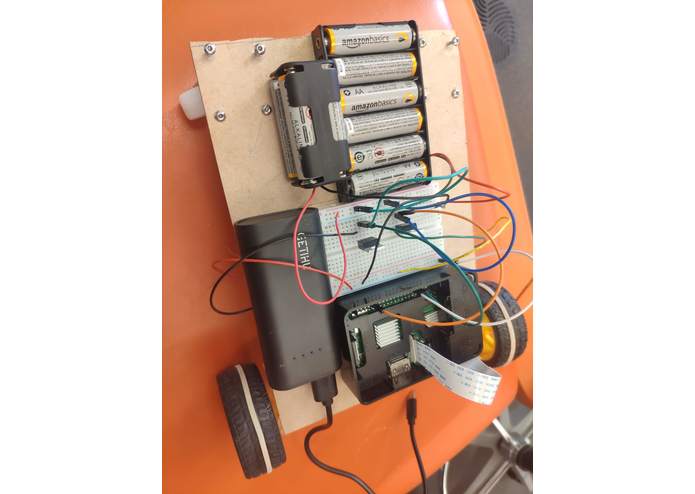
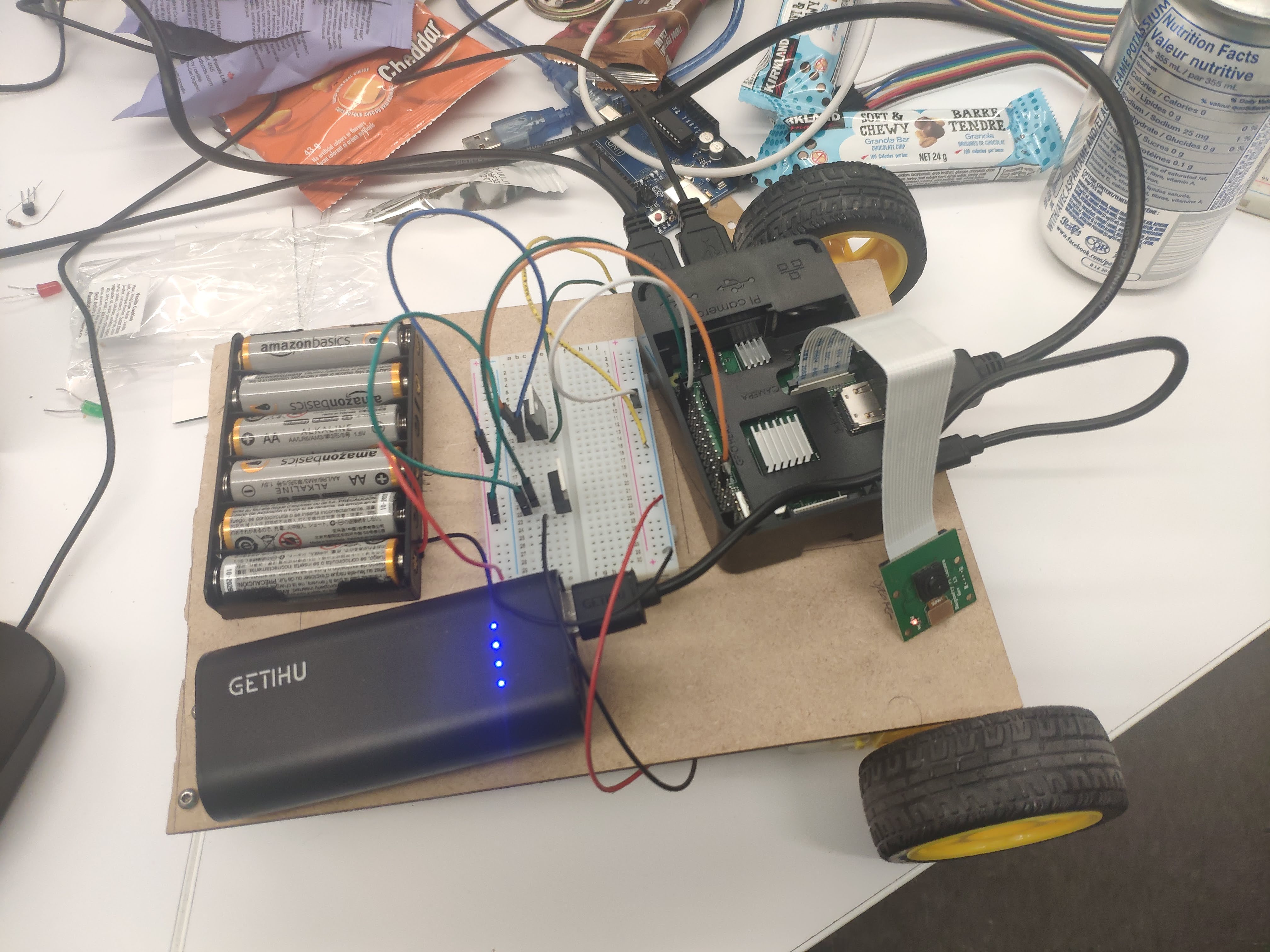
Essentially the final robot
-
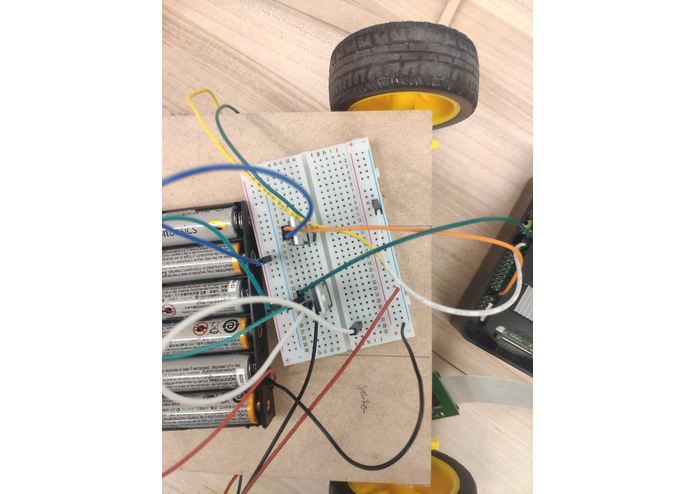
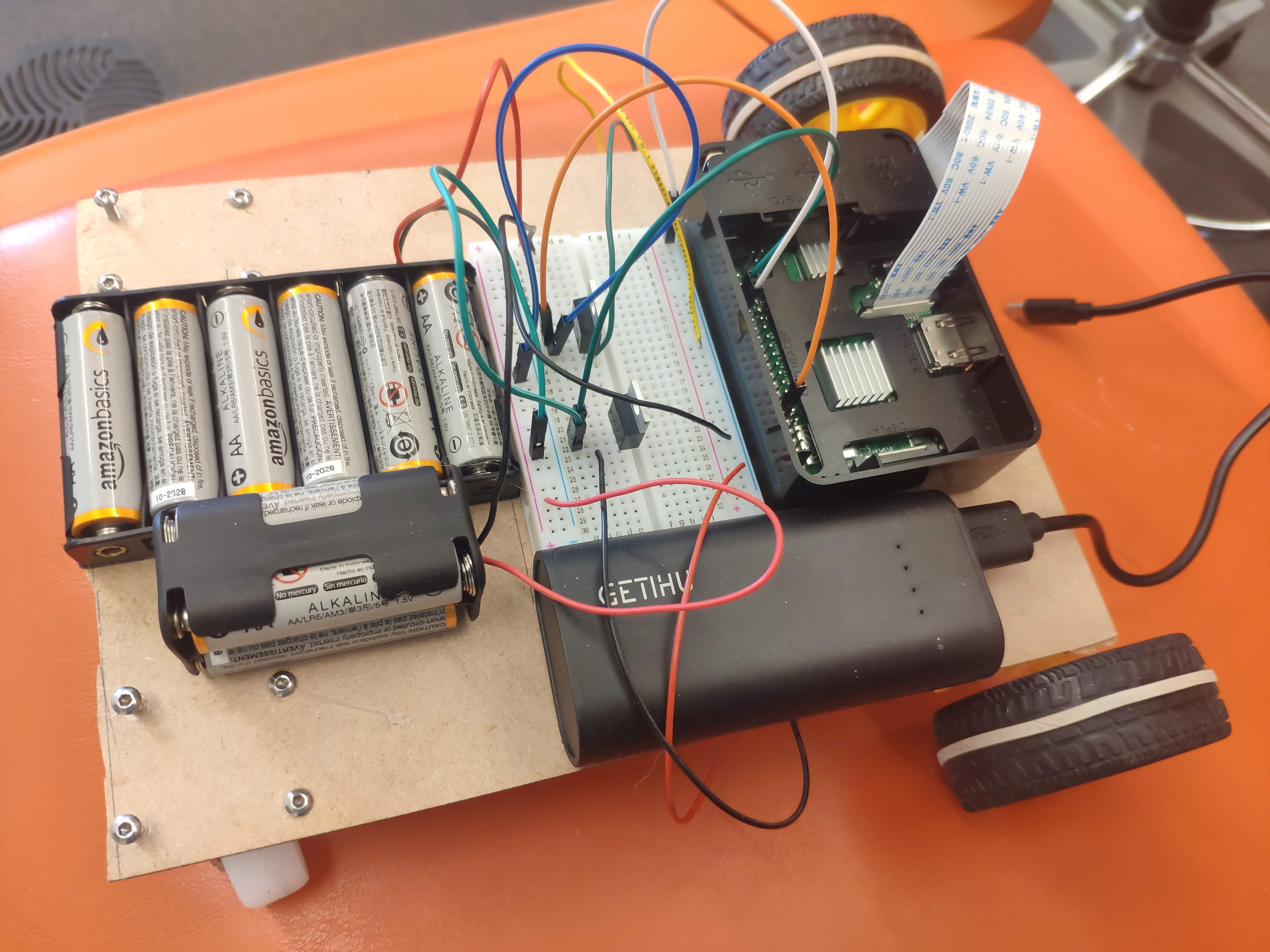
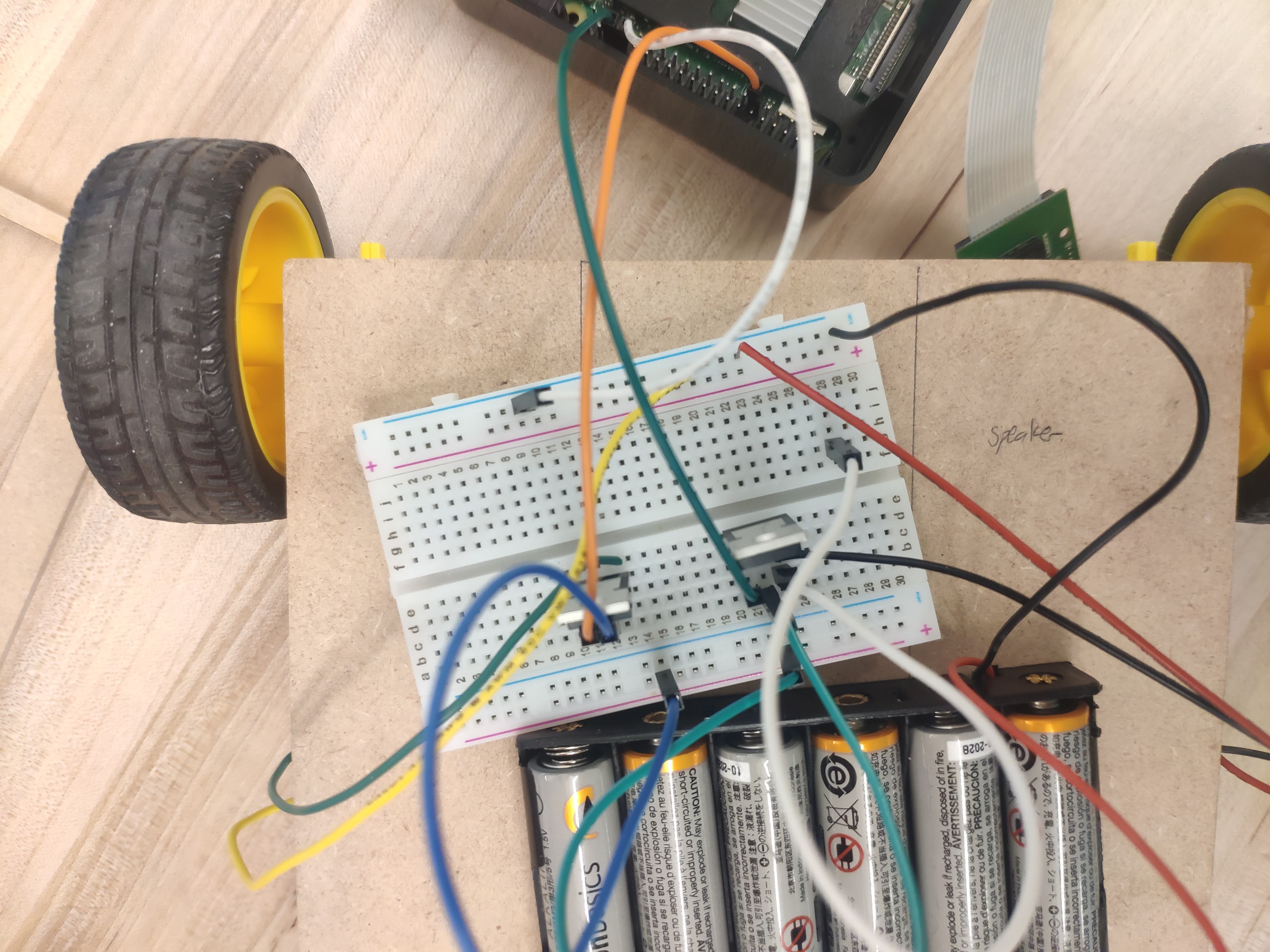
detailed wiring
-
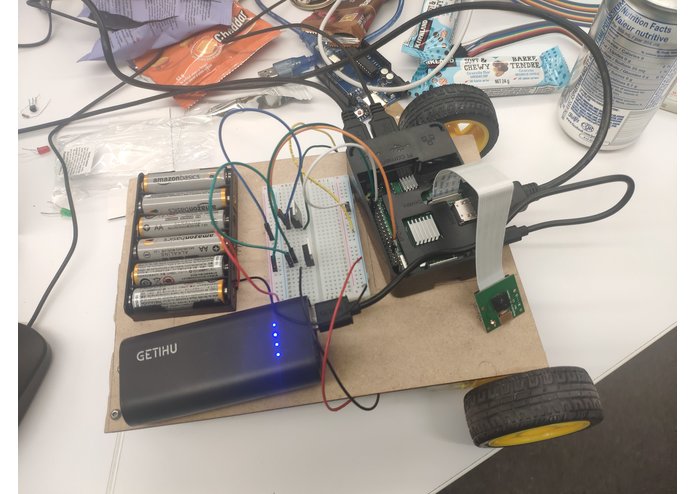
first time power on!
-

early in the morning, debugging

Inspiration
We wanted to make something that's functional and can find its place in real life. Initially we decided to use Arduino to make an encrypted texting device, but eventually we found that it's fun to make a toy - something we want to play with as well!
What it does
We made a remote-controlled car that has a webcam attached. It is able to launch the webcam capture application on startup, and send the video stream over either local network or internet to a compatible browser (tested with Firefox). It can also be controlled remotely using a browser. While the top speed isn't very fast, it's definitely good for watching your house when you're away!
How we built it
We wanted to challenge ourselves, and what better way to do it than using a hardware and learning a software that we've never used before! Most of our team has prior Arduino experience, but we opted to use Raspberry Pie, believing that it will offer more flexibility and power. We started with a rough outline of the chassis and the components to include, then went about programming the magic that makes all these happen. We looked into different control ideas such as streaming to an Android phone or using a web server, and in the end decided that making our robot available on the web is much more versatile. Then, it's many hours spent on troubleshooting and fine-tuning, and wrapped up with this mornings final assembly.
Challenges we ran into
We had a really difficult catch-22 problem that seem simple at first: we required two separate terminal applications to be launched at startup, but referencing the Python files in the startup file means that we can only run one application at a time; however, the two programs cannot be run in the same terminal. We troubleshooted for 2 hours, in the end created many shell scripts that called each other in order to launch two separate terminal applications.
Accomplishments that we're proud of
We're definitely proud of the fact that we have (mostly) finished what we set out to do! Integrating software and hardware like this is fun and rewarding, and we all jumped in joy when the robot first moved! We're also very proud to solve the one-application launch issue above, and are very glad that we have taken part in this Hackathon!
What we learned
We learned a lot - all of us started as Pi beginners, but we gained much better understanding of this board by using it for 24 hours. We also learned to integrate multiple programming languages together, something that we have never done. It's definitely something extremely useful and rewarding!
What's next for The Roaming Watchman
Well... Because all of the parts are sponsored, we have to let the Watchman go. However, the next time we're at MakeUofT, we are looking forward to make something even better!
 Wang")
Log in or sign up for Devpost to join the conversation.