-
-

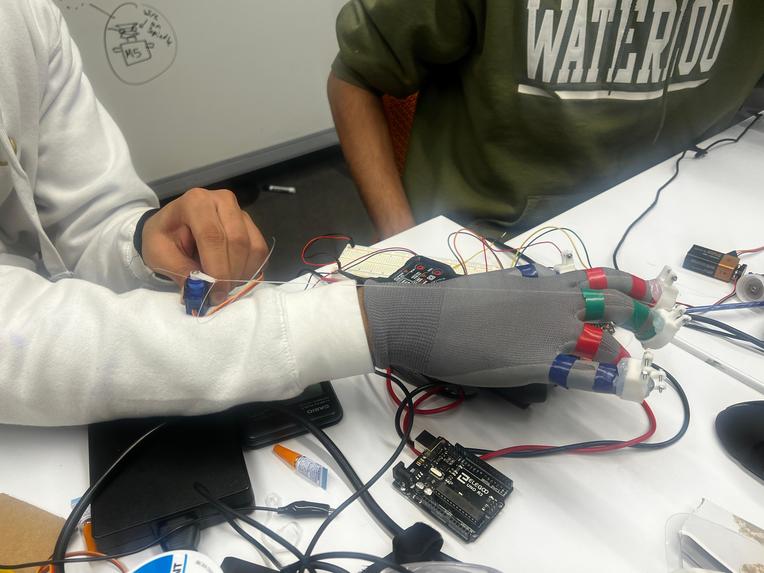
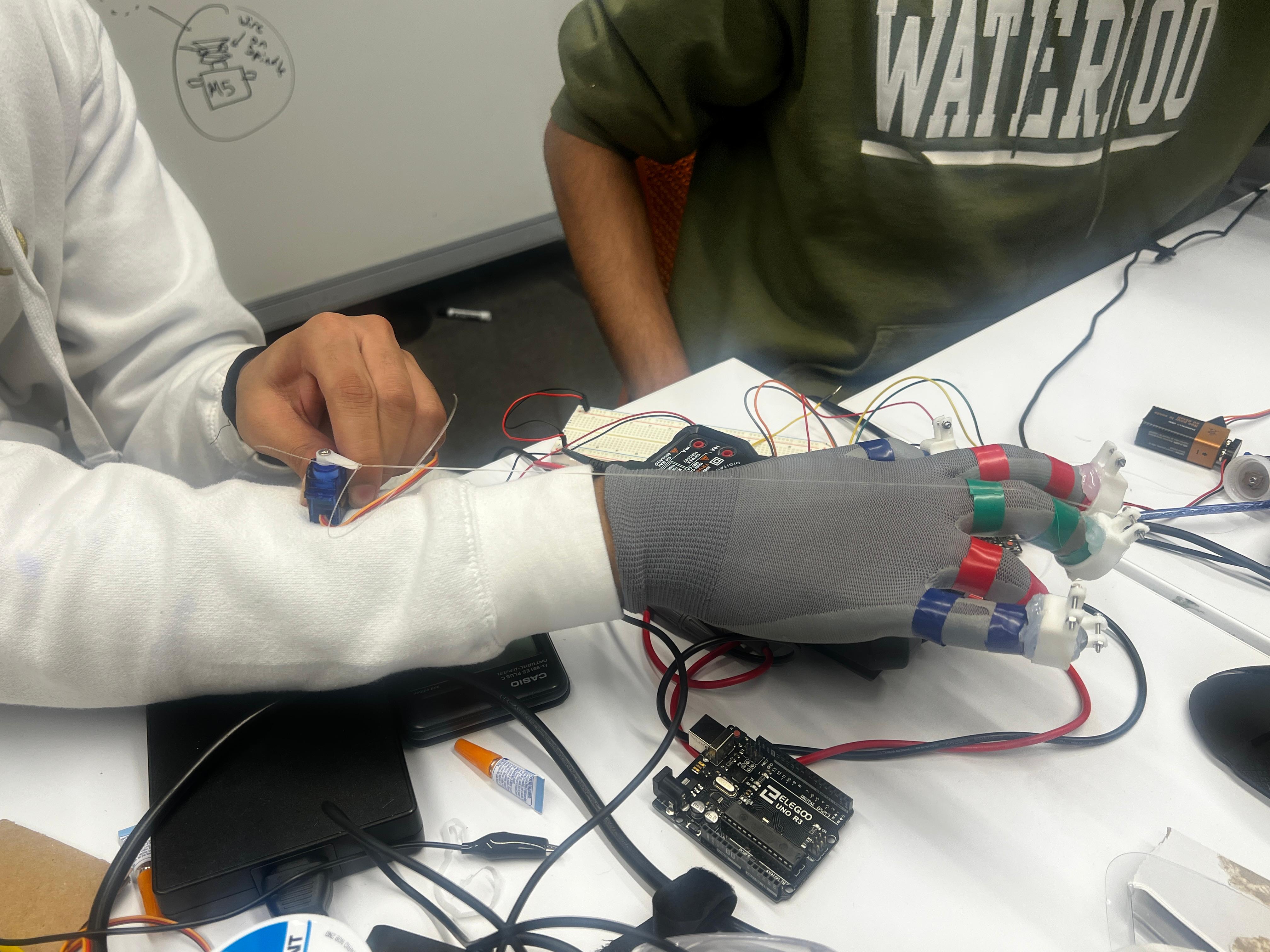
The final product on an arm!
-

Ideation and planning stage
-

Getting the glove prepared for OpenCV parsing
-
Testing cable lengths for servo spools



Inspiration
During STV100, a Society, Technology, and Values course at UWaterloo that discusses the relationships between the bleeding edge of technology and societal progress, a class discussion turned towards how the most exciting technology isn’t necessarily the most heavily adopted. When asked about how many people had used VR in the last month, the class of nearly 100 students had 0 people raise their hands. VR, despite seeing rapid advancements and significant drops in price over the past decade. Pondering over the question ourselves, we realized that the key reason we never felt terribly interested in VR was the lack of immersion. Despite being more visually involved, the controls and feedback from VR were simply lacking compared to other methods of playing video games. Hence, we decided we’d incorporate one of the most important, yet often overlooked sensations into VR: touch.
What it does
Our haptic feedback arm is designed to add the missing element of touch to virtual reality by simulating physical sensations through controlled force application. Using tensioned strings attached to a glove with custom 3D-printed finger mounts, the system adjusts string tension via servo motors to replicate the feeling of interacting with virtual objects. An anti-movement torque feature simulates reaction forces, enhancing realism by mimicking the resistance of solid surfaces. By translating virtual object properties such as width and shape into precise force feedback through mathematical modeling, the system creates an immersive touch experience. Designed as a slide-on device with adjustable straps, it accommodates various hand and arm sizes, making VR interactions more lifelike and engaging.
How we built it
We built a haptic feedback arm that replicates the sensation of touch using tensioned strings to apply force to the fingers. The system features a glove with custom 3D-printed finger mounts, guiding the strings through a series of pulleys that leverage mechanical advantage to direct force efficiently. Servo motors dynamically adjust string tension, while an anti-movement torque feature simulates reaction forces for a more realistic touch experience. We fabricated custom mounting plates to house the servos and pulleys, integrating an Arduino-based control system that adjusts tension based on virtual object interactions. Using mathematical modeling, we established the relationship between string length changes, the shape of a virtual 3D object (width), and servo rotation, ensuring precise force feedback. The assembly incorporates various fasteners, including screws, adhesives, and adjustable straps, creating a slide-on device that fits different hand and arm sizes while maintaining accuracy in force application.
Challenges we ran into
One of the main challenges was the bluetooth module. We had never worked with it before and were not accustomed to how to connect the part with our Arduino. Although we were able to learn along the way, we also faced difficulties in connecting with the bluetooth module. It seemed as though the HC-05 was not consistent in terms of connecting with different laptops, it was great at connecting with phones running an Android software as opposed to an iOS device. In fact, our first successful test involving the HC-05 was a simple app designed for an Android phone. Connect with a laptop was troublesome as the laptop at first wouldn’t recognise the bluetooth module as a device it could connect to, and once connected, the laptop would automatically disconnect after a few minutes. Additionally, the servo motors provided were inconsistent and did not work. We could hear the motor working however, the gears in the block did not move making it almost impossible to test code, and made it very difficult to use the motors to tense the fingers for our vr glove.
Accomplishments that we're proud of
We're proud of how we tackled the challenge of learning and integrating various APIs, including Flask, FastAPI, and WebSockets, while also working with hardware components. This project was a significant learning curve, helping us bridge the gap between software and mechanical systems—something we can all appreciate as mechatronics engineering students. It pushed us to step outside our comfort zones, strengthening our understanding of both front-end and back-end development while maintaining a hands-on approach to hardware integration. As a team, we are incredibly proud of the progress we've made while working with the HC-05 Bluetooth module, despite the many challenges we've faced. One of our biggest struggles was getting the Arduino to successfully upload code, as we repeatedly encountered the "avrdude: stk500_getsync()" error. We worked together to systematically troubleshoot the issue, checking the COM port, baud rate, and wiring connections, demonstrating our ability to problem-solve and adapt under pressure
What we learned
We learned that if we push hard enough for a long amount of time, you can actually progress alot further than you can ever imagine. Throughout the course of this MakeAThon, we were able to produce a VR glove prototype which can read signals provided from a laptop using the HC-05 bluetooth module integrated with an Arduino. Additionally, we also learned you can’t get batteries at 7-11,.
What's next for The Handholder
Have more sensor integration and instead of having PLA parts, we can solidify our design with better more durable materials. 3D printed parts proved to be less durable and broke quite easily, meaning that it could be better to have a larger infill or to machine the parts. Sensor integration can improve the force feedback of the VR glove such as flex sensors, linear actuators or vibration motors to enhance the user experience.





Log in or sign up for Devpost to join the conversation.