Inspiration
Looking at the future of robotics, it seems IoT dominates more than anything. IoT robotics is becoming an increasingly complicated and diverse field, but the interfaces cannot always keep up. Automation is limited by it's ability to adapt, while humans lack the physical prowress to perform in certain situation. We asked: Why not blend both? We're creating a glove that can connect the human with the machine.
What it does
Our glove interfaces with an IoT device in order to control it according to the humans movements. The glove can connect with a robotic arm or drone for instance, and then offer a more intuitive approach to technological control rather than rely on dated, bulky systems that do not have ths scalability to match the needs of the market. Not only is our glove able to control robotics, but it is integrated with Unity, offering potential in becoming the next controller for VR/AR platforms, allowing users to fully imerse and perform hand motions without the need for an external sensor. This means that you can take the glove with you to anywhere and seamlessly connect with devices to control them. Potential markets and opportunities include, but are not limited to: medical surgery (remote locations), industrial factories (heavy lifting w/ human's dexterity), space (human can control scalable robatic arm w/o joystick, less inaccuracy), drone (interface to precisely control flight), and VR/AR (next generation glove, not as bulky as haptic, easy to travel/bring with you).
How we built it
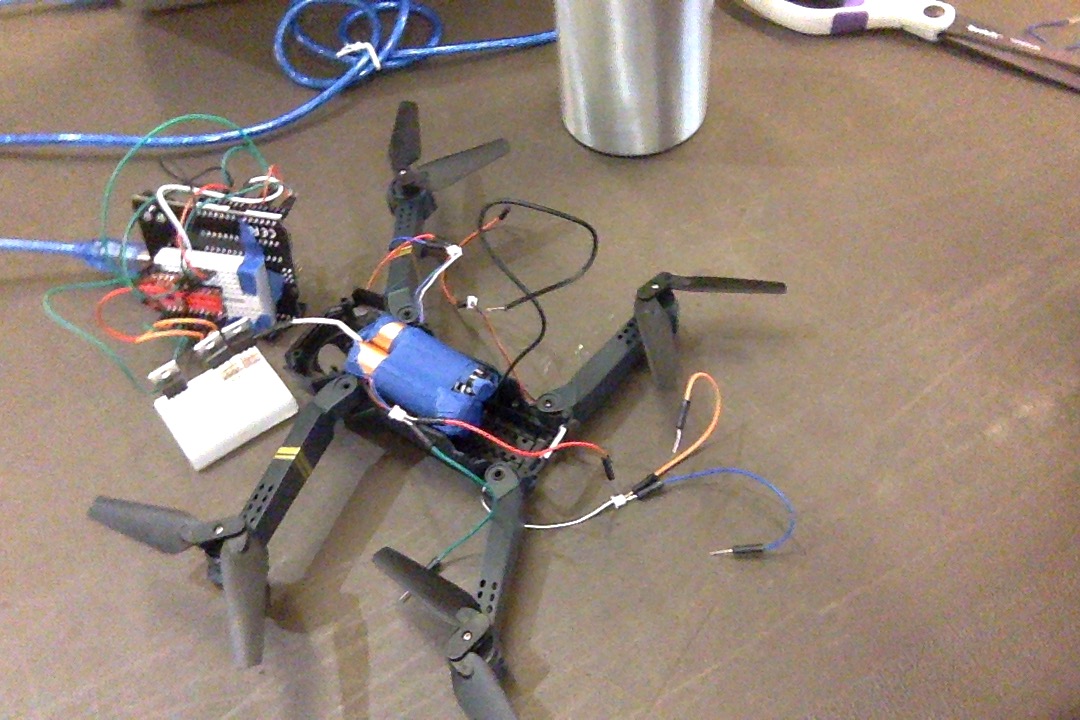
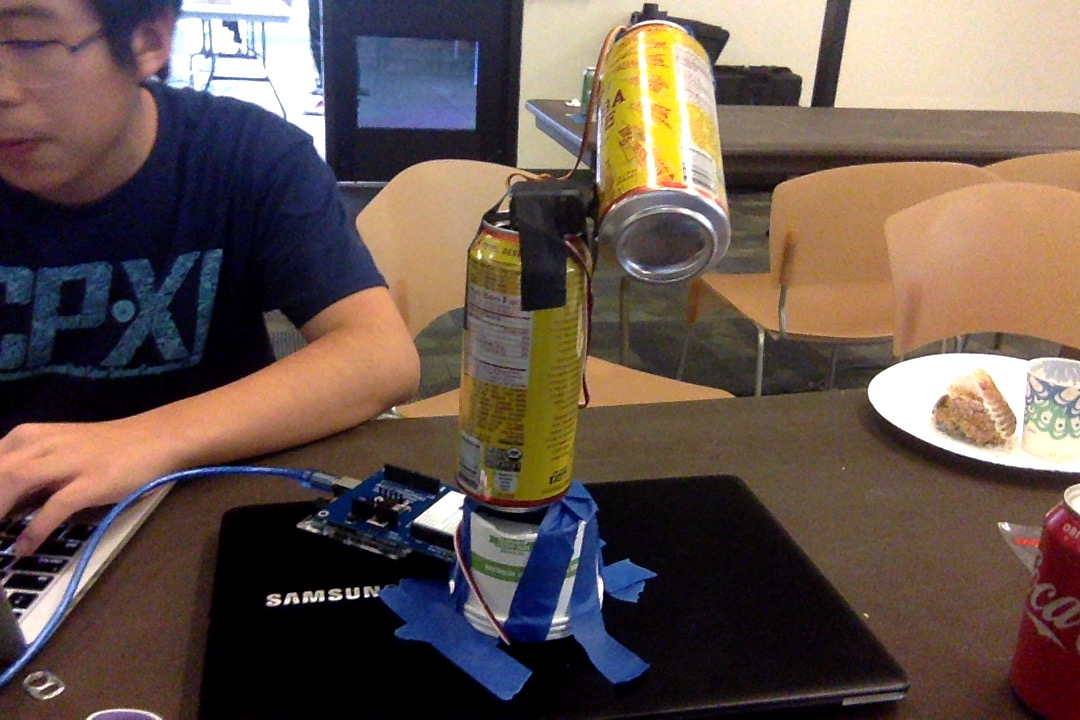
Over the weekend, we took time to explore a drone. The drone however was impossible to hack into in order to communicate with it. We tried listening to the wireless communication between the controller and the drone, but we were unable to decode the messages. It took us quite a while to try and add SPI wiring to our IMUs, add VR to our project, and communicate with the camera on the drone. With only a couple hours before the deadline, we decided to switch to a project that used our glove for a Robotic Arm. This robotic arm is a minimum viable product that highlights the communications between the Arduino, through Unity, and into the motors. Along the way, heavy amounts of c++ were used with the Arduino IDE, and we have learned about communications array between different boards. Unity development was also needed in order to polish the filter that is used on the IMU. The entire group has gained valuable insight into the field of electrical engineering, and if anything, has already won by coming out of the hackathon with so much new knowledge.
Challenges we ran into
We tried to take apart the drone and hack it's hardware, but there was no possible ports to access it as the entire system was closed loop. During the process, we managed to fry the motherboard of the drone and so had to resort to other means to communicate with the drone. We spent the next 20 hours trying to set up the drone with arduino boards and raspberry pi in an attempt to create a modular IoT drone that we could control. Setbacks in the electrical wiring and our lack of hardware did not contribute to the drone salvaging process. We especially had major problems trying to figure out how to connect Arduino Uno with the motors, as Arduinos can only handle 200mA of current while our motors needed around 1A. This meant we had to make a whole new drone from scratch that would use the arduino and also would communicate with our pid functions. Next, we decided to go for a raspberry pi as it has a built-in wifi feature, but nobody at the hackathon had one. Someone from our group had to personally drive downtown to meet somebody from the hackathon (who went back home) in order to borrow his rasp pi. We tried to add MOSFETs in order to bypass this problem, but the wiring was also rigged with errors. It was our first time working with one, and even though we asked for help and searched online, we were unable to successfully connect the drone motors with the uno. Having only a couple hours left until the deadline, we had to pivot and entirely trash our old idea for a new one.
Accomplishments that we're proud of
Taking apart our drone and frying it was probably the best thing we did at te hackathon. Taking apart the drone allowed us to peer into its inner workings and try to integrate our own hardware into it's mainframe. Frying it was interesting as we learned the hard way what not to do. The integration part was definitely a pain, but worth it, as we got to experiment with different ways to approach solving the problem. We now better understand how to wire things together and how to operate on network protocols.
What we learned
Having taken apart the drone, everybody in the group now understands how the drone works and what happens under the hood. By attempting to rebuild a drone using parts we could interface with, we could do our own wiring and even though we never finished, we understood how different electrical parts work and what it takes to complete them. The drone was especially hard as it was a consuer product, not an IoT one. Afterwards, once we pivoted towards a robotic arm, we had to trash a lot of our ideas and create new code for our project. It was definitely a hectic morning.
What's next for The Glove.
We plan to continue on with our project, especially with the drone. We felt like we were limited by the time and not our potential in completing this project, and we feel that if we spent a little bit more time researching and bought the materials, we can definitely finish our drone project and show our awesome product.







Log in or sign up for Devpost to join the conversation.