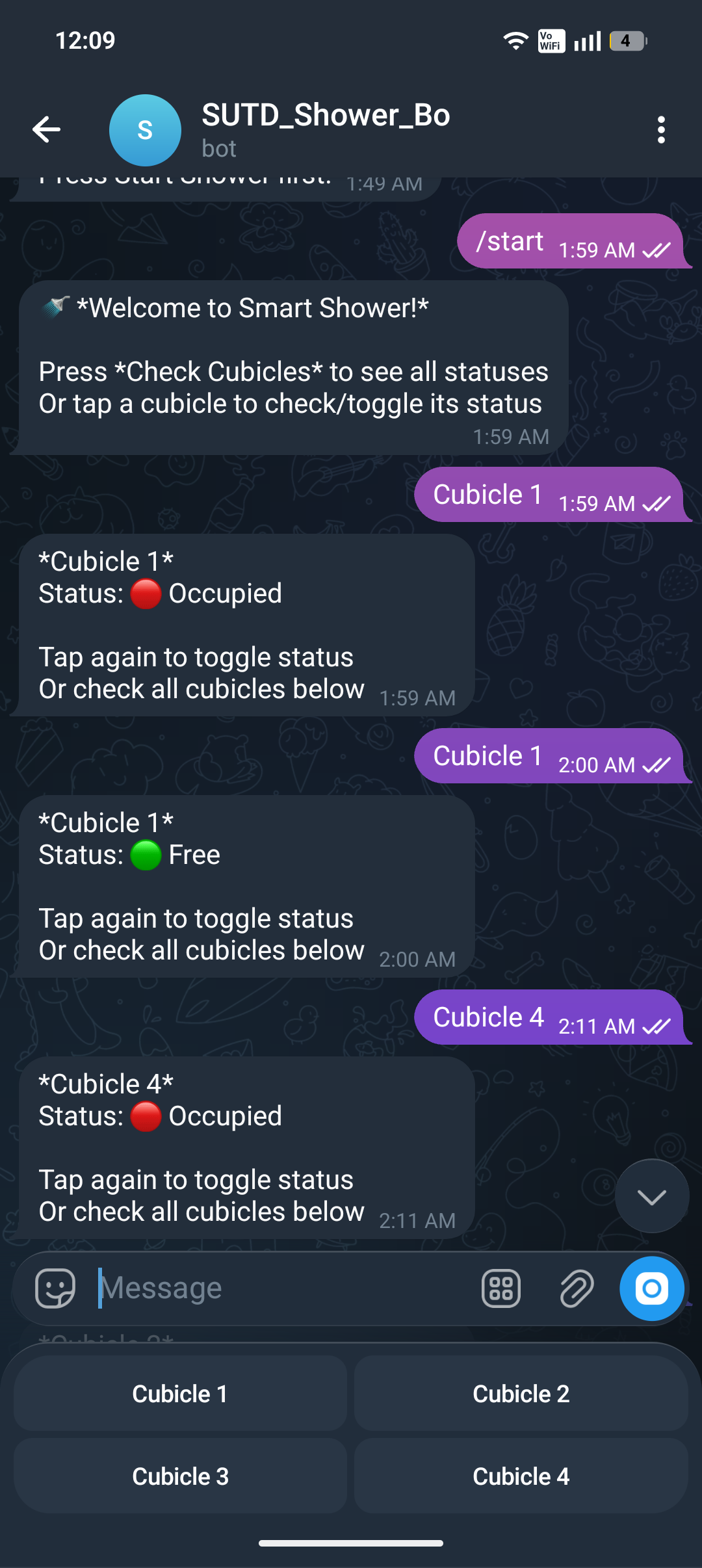
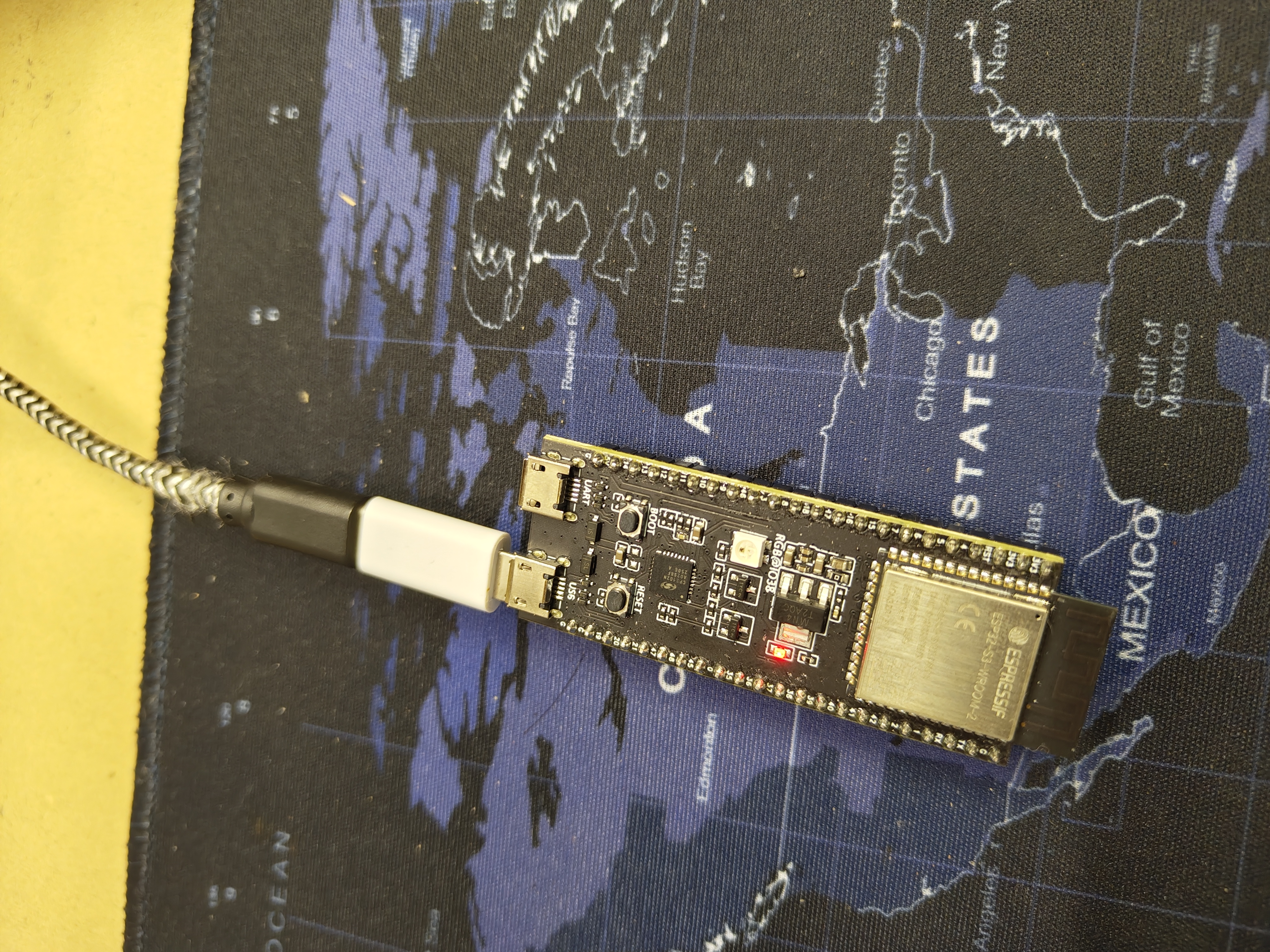
Inspiration We all know the struggle: dormitory showers are a war zone. But it’s not just about finding a shower—it’s about getting The One. The specific cubicle with the perfect water pressure, the working lock, and the least amount of "mystery hair" on the wall. Walking all the way to the bathroom only to find your favorite throne occupied is a tragedy. We wanted to end this injustice. We built The Cubicle Cop to stake out the crime scene (the bathroom) so you don't have to. What it does The Cubicle Cop is an IoT surveillance system for your favorite shower stall. Stakeout Mode: It uses sensors (simulated via buttons/distance sensors) to monitor if the cubicle is "Occupied" or "Vacant." The Raid: When the "suspect" (the current user) leaves, the system instantly triggers. Dispatch: It sends a high-priority Telegram alert to your phone: "Suspect has fled! Cubicle 1 is secure. Breach and clear!" Visual Status: An RGB LED indicates the threat level (Red = Occupied, Green = Go, Go, Go!). How we built it We engineered this solution using the ESP32-S3 microcontroller as the brains of the operation. Firmware: We flashed the board with MicroPython for rapid prototyping and real-time control. Connectivity: We utilized the utelegram library to interface directly with the Telegram Bot API over WiFi. Logic: The code runs a continuous loop checking sensor states while maintaining a persistent socket connection to the Telegram servers to listen for the /start command. Hardware: We used the built-in NeoPixel RGB LED for status indication and handled hardware interrupts to detect occupancy changes. Challenges we ran into The interrogation room (debugging) was tough. The "Zombie Code" Issue: We faced a critical bug where the ESP32 would refuse to update its code, running an old "zombie" version from internal memory despite our saves. We had to perform a "hard wipe" of the filesystem to fix it. Library Mismatches: The utelegram library was sending two arguments (topic, msg) to our handler function, but our code only expected one. This caused immediate crashes upon receiving a message. We had to reverse-engineer the library call and write a "bulletproof" *args handler to make it crash-proof. The "Device Busy" Loop: Our WiFi connection loop was so aggressive it locked up the USB serial port, preventing us from stopping the code. We had to master the timing of the physical "Boot/Reset" buttons to break the loop. Accomplishments that we're proud of "Bulletproof" Polling: We wrote a robust message handler that can accept any number of arguments, making the bot resilient to library updates or API changes. Zero Latency: The alert moves from the hardware trigger to the Telegram notification in under 2 seconds—faster than anyone can walk down the hall. Recovering from a Brick: We successfully unbricked the ESP32-S3 after it got stuck in a boot loop, proving we can handle low-level hardware debugging. What we learned MicroPython Interrupts: We learned that time.sleep() blocks the processor, so we had to structure our main loop carefully to keep the bot responsive. Serial Communication: We gained a deep understanding of UART/COM ports and how the ESP32 handles USB serial connections during soft reboots. API Limits: We learned how to manage Telegram's polling limits to avoid getting "rate limited" (kicked off the force). What's next for The Cubicle Cop Heat Mapping: Logging data to find the "peak hours" so you can schedule your shower strategically. Multi-Stall Support: expanding the precinct to monitor an entire bathroom row. The "Siren": Adding a piezo buzzer that plays a police siren when you successfully claim the spot.
The Cubicle Cop
An IoT solution for the dormitory shower war zone.
Updates

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.