-
-
-
-
-

-
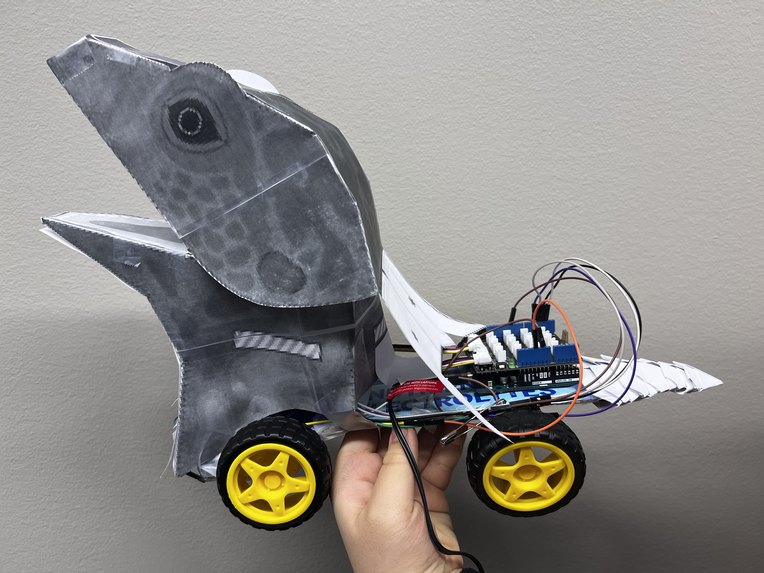
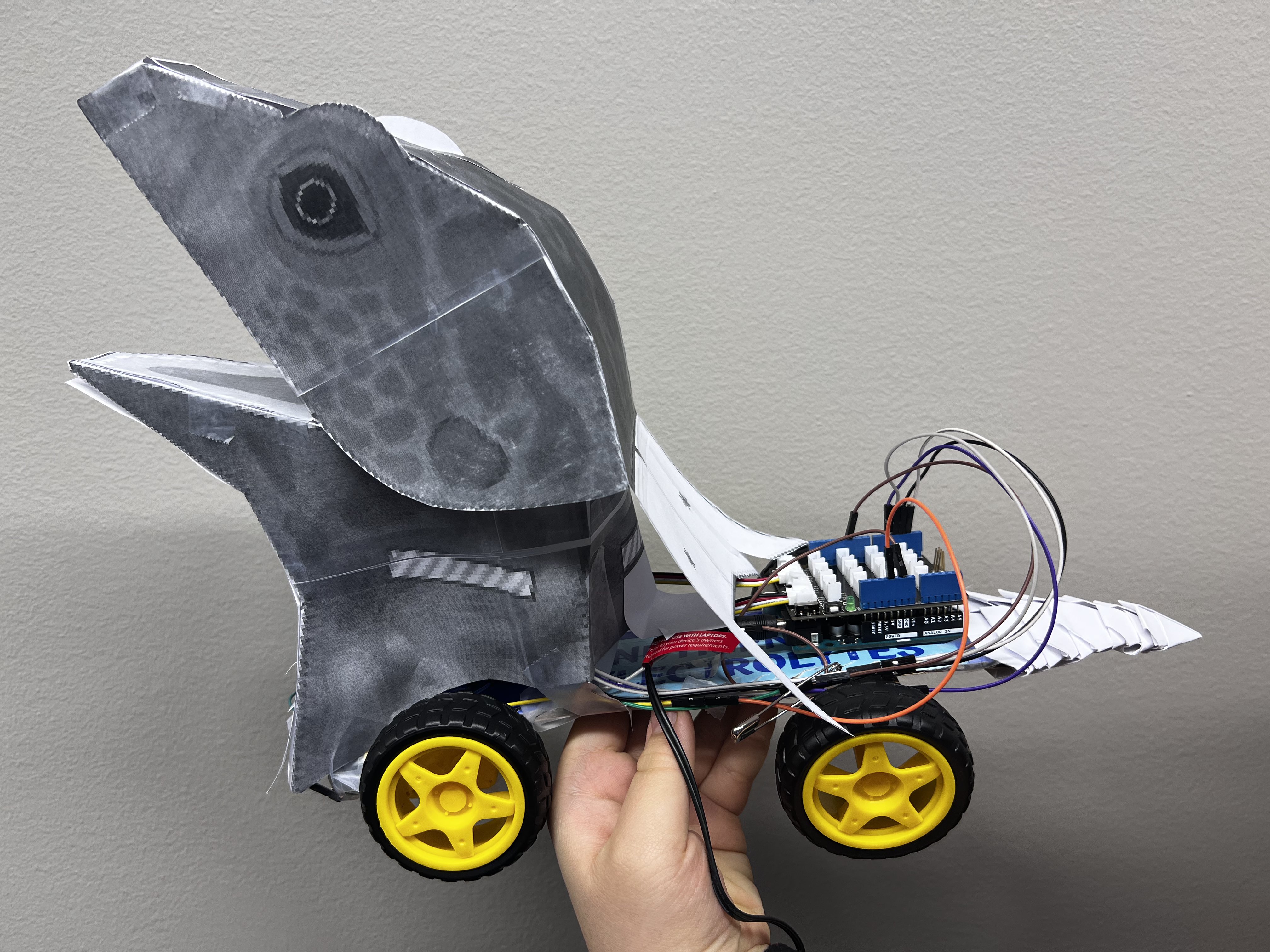
Complete finished project!


Inspiration
This was our first time doing hardware so we wanted to do something fun and silly! We took inspiration from Arduino Bluetooth-controlled cars and changed it so light sensors control the motors.
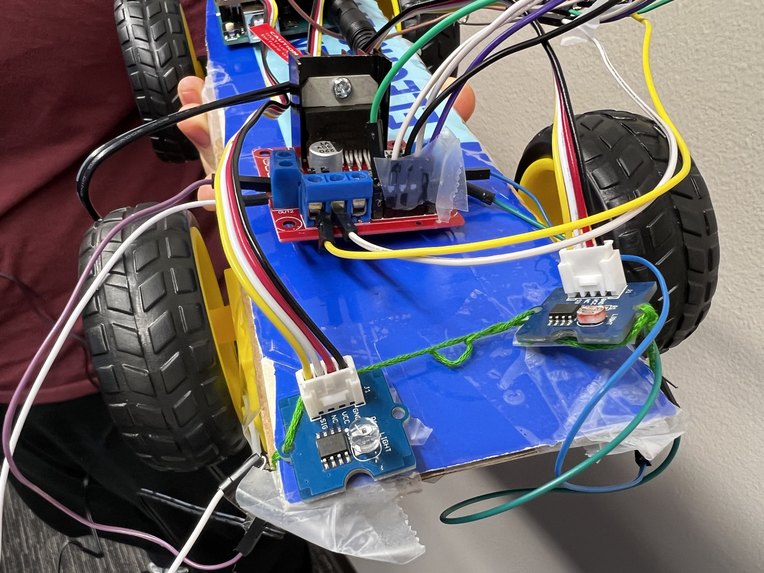
What it does
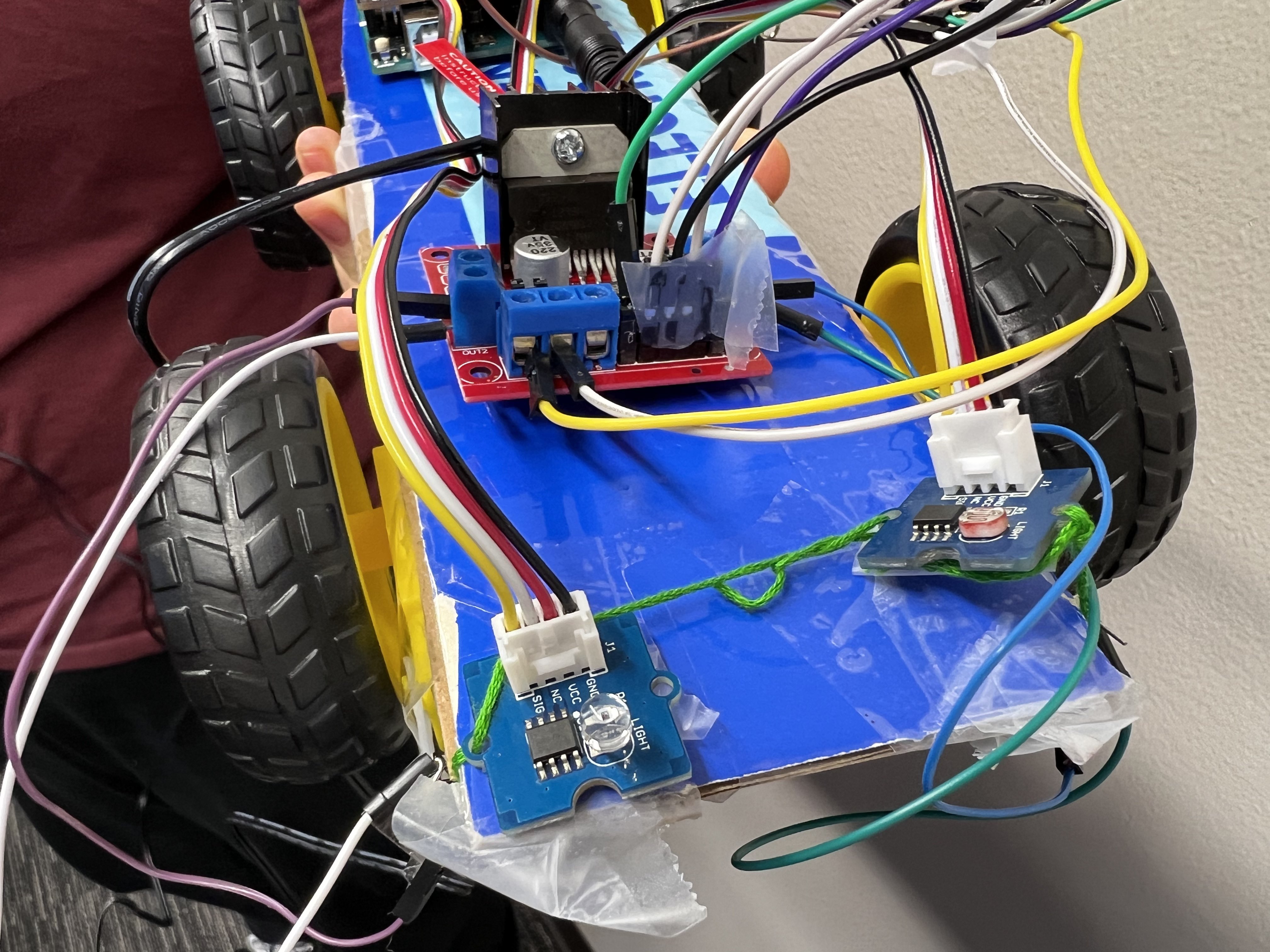
It tracks the intensity of light around it and when it reaches a certain threshold, it begins moving. If the intensity on the right sensor is greater than the left, it turns right, and vise versa. Basically, it mimics the natural urge of lizards to go to bright lights to seek out warmth.
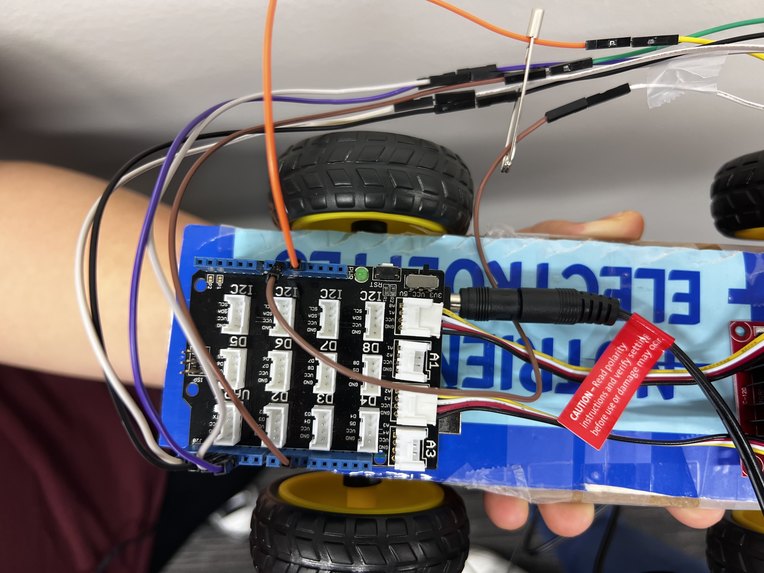
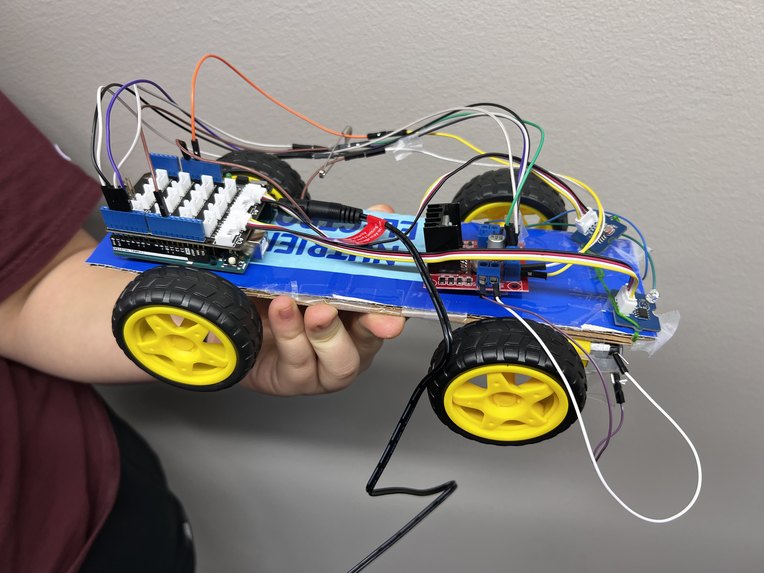
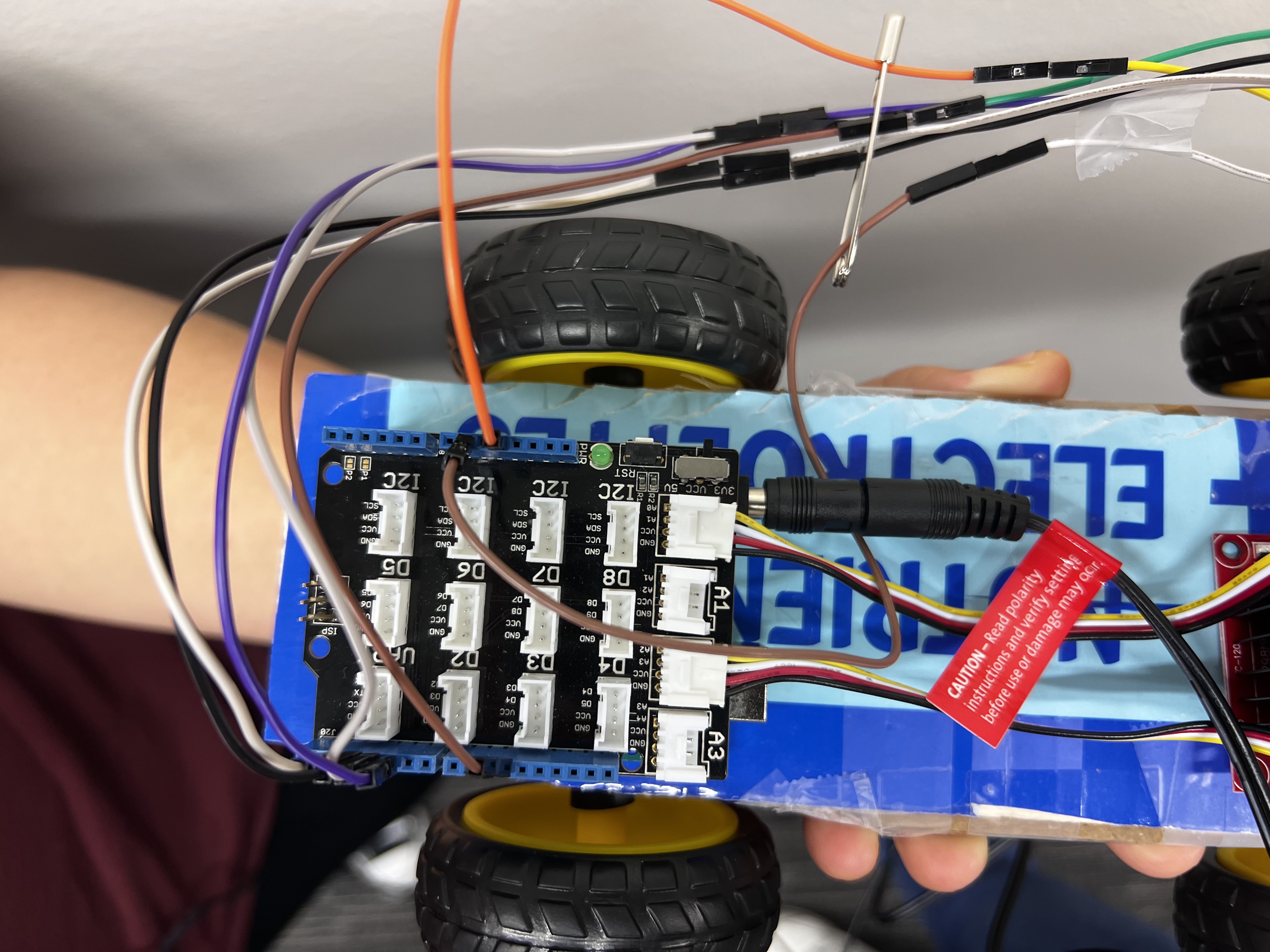
How we built it
We used an Arduino to communicate between the light sensors and motors. All of the electronics sit on on a cardboard base and the lizard "shell" is made out of paper.
Challenges we ran into
What challenges did we not run into? Getting the right parts at first was difficult because we were still learning which parts we need and which parts did what. And then trying to figure out why the wheels would spin sometimes was difficult and we ended up having to plug it into a AC adapter and into the wall because the batteries we had weren't powerful enough.
Accomplishments that we're proud of
3 of the 4 of us are beginners in hardware and we had to learn everything as we went. We are really proud of ourselves for actually making a robot that does what we want, we did not expect it to work at all.
What we learned
Again, we had to learn everything on the spot so we got a lot of electrical engineering knowledge and we learned a bit of C++.
What's next for Larry the Light Following Lizard?
Definitely getting a bigger battery/battery holder so we don't have to plug in the lizard and it can travel freely. Along with that, learning how to breadboard would be helpful to make the wires neater and the circuit easier to understand.



Log in or sign up for Devpost to join the conversation.