

Inspiration
Wild natural pollinators are in decline due to the mass use of pesticides and herbicides, leading to demand for other means of pollination. Unfortunately, manual pollination is expensive and time-intensive, while mass-pollination via sprays or airborne particles is often not effective and wasteful. After some research, we honed in on the strawberry plant, a very popular fruit that has had major pollination issues due to heavy industry pesticide use driving away pollinator species and the fact that every seed in the strawberry flower must be fertilized in order to have the "proper" recognizable strawberry look. We were inspired by the "smart home" concept and elements of computer vision to create a robot that recognizes strawberry flowers and can simulate buzz pollination.
What it does
We created a robot that recognizes strawberry flowers and simulates buzz pollination by manipulating motors in all (XYZ) dimensions. It utilizes computer vision arguments on the mock strawberry flowers, with OpenCV and python operating on Raspberry Pi 3 Model B.
How we built it
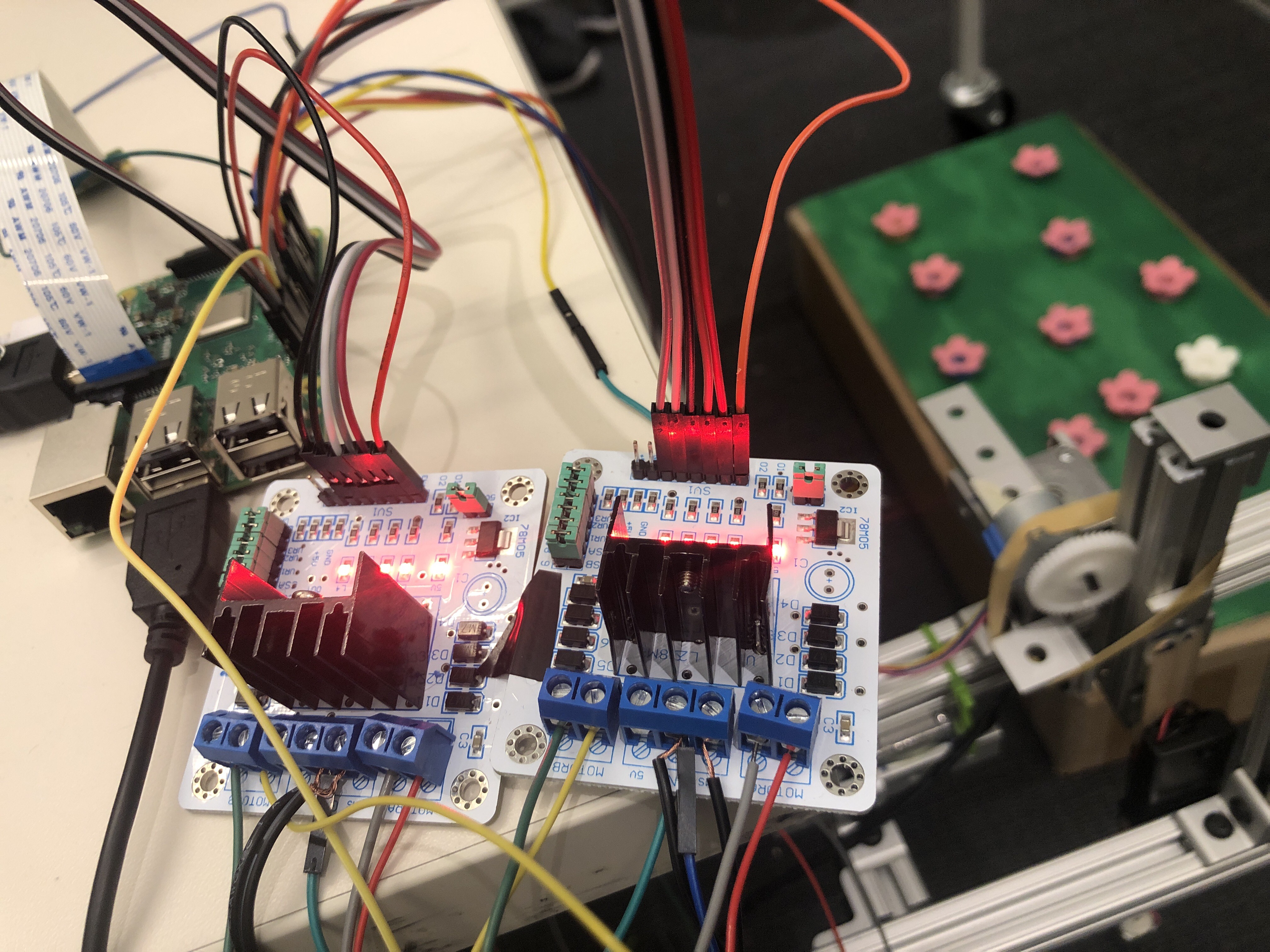
We utilized several 80-20 frames as our main structure, with [whatever challenge material] acting as additional support. Our motors were three stepper motors.
Challenges we ran into
We had some major issues with our stepper motors, from not being able to find proper drivers to not being able to power or operate them properly.
Accomplishments that we're proud of
Fun team :D



Log in or sign up for Devpost to join the conversation.