Inspiration
Many forms of technology and systems are based on the biological systems we see all around us, this is called biomimicry. Whether it’s the Japanese Shinkansen, inspired by a bird, or a robot modeled after a king crab, nature provides plenty of ideas. The HASOWASO-2000 takes from the king crab, its pincers are made for pinching and its eyes for seeing. The robot's components mimic specific crab features: Pincers (Claw): Acting as a claw, the pincers use SRVO motors to grip, pick up, drop, and lift objects, just like a king crab's claws. Eyes (Ultra-violet Sensor): Much like a crab using its sight to navigate, the ultra-violet sensor acts as the robot's eyes, detecting walls to ensure it stays on the correct path and avoids collisions. Legs (Wheels): The robot is bipedal, utilizing two wheels for movement, enabling it to traverse its path. An additional support prevents it from falling over. Nervous System (Sensors): To provide crucial safety and path-following capabilities—similar to a crab's complex nervous system alerting it to danger—the HASOWASO-2000 uses a combination of colour sensors and two IR sensors. The colour sensor keeps the robot on the designated path, while the IR sensors prevent it from falling off elevated surfaces.
How we built it
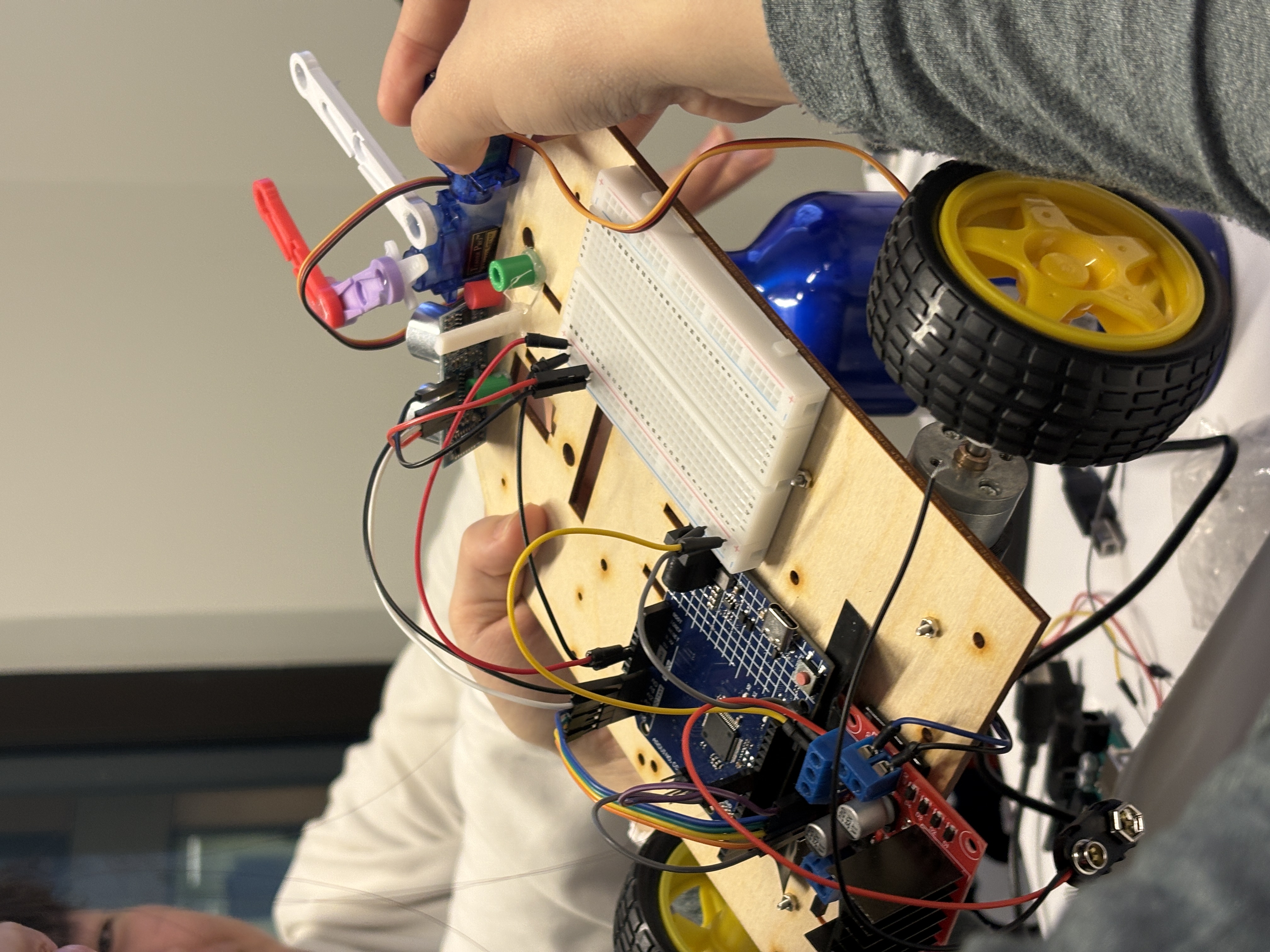
For this challenge, we were provided a toolkit of parts: an Arduino Uno microcontroller, a set of sensor modules, and 3D-printed claw components. Ultrasonic sensors were used for obstacle and object detection. To maintain path tracking, color sensors were used to identify and follow the trajectory of the course, which consisted of black, red, and green lines. Additionally, two infrared sensors were mounted on the left and right sides of the robot, which were especially useful during the platform-climbing challenge, enabling reliable edge detection and navigation. A servo-driven custom claw was used for object manipulation of boxes and shooting a ball.
Challenges we ran into
Due to hardware limitations, we were unable to use the conventional approach of line following which used IR sensors. Instead, we relied on a single color sensor, which introduced several challenges, such as inaccuracy and difficulty in tracking the boundary of the line. Additionally, the large number of required tasks made structuring the code quite challenging.
What we learned
After multiple iterations, we learned that taking the simplest approach was often the best option! We also saw first hand that slow and steady wins the race. Testing the fundamentals and making sure that each individual part worked helped our final product become what it is today. For the next time, we should create an overall complete plan of all our tasks so that we always know what the next step is.

Log in or sign up for Devpost to join the conversation.