-
-
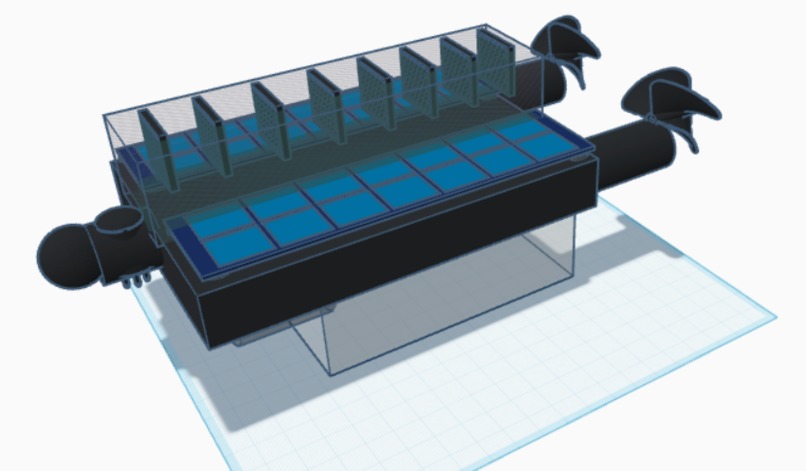
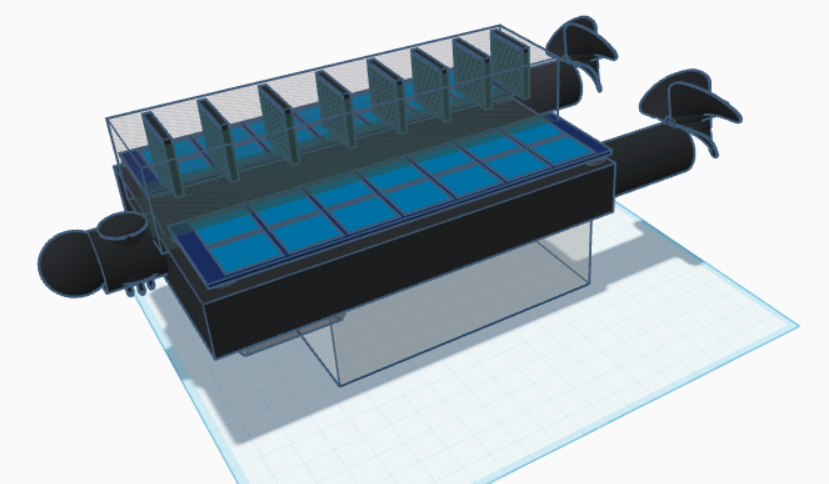
Image of THE Aquabot Prototype 2.0
Inspiration
Each year, 8–12 million tons of plastic enter the ocean, threatening marine life and ecosystems. THE Aquabot was born from a desire to combine environmental awareness, digital modeling, and storytelling into a hands-on learning experience that inspires action.
What it does
THE Aquabot is a digitally modeled robot that simulates ocean plastic cleanup. It uses rotating arms, mesh collectors, and coded movement patterns to demonstrate how technology can help remove debris from marine environments. Through animation and storytelling, it also teaches people about the journey of plastic and the importance of reducing waste.
How we built it
We used TinkerCAD to design the model of the robot, that is just an idea, we also trained an AI to detect plastic waste and not plastic waste, using images, we uploaded 20 images for plastic waste and 20 for not plastic waste, and then we made a code, with the slight assistance of AI, that could help us use a Webcam to detect the plastic, or not plastic.
Challenges we ran into
Some challenges we ran into were agreeing as a team on one idea, at first we spent around 40 minutes just brainstorming and arguing but eventually we agreed on this idea, because we believed that it best fit the prompt. We also ran into a challenge with the code, the code had errors and we couldn't get it to work, but after a few hours of troubleshooting, we managed to fix it and we got it working.
Accomplishments that we're proud of
We are proud of how far we came with the project, even though there were a lot of ups and downs, we still managed to problem solve and we got through it. We are also proud of the outcome, everything we worked on ended up working just the way we wanted it too.
What we learned
We learned how to train AI, and we also thoroughly understood the code, and we also learned how to problem shoot. We also learned how to build models in TinkerCAD. We also learned problem-solving skills after have a few difficulties.
What's next for THE Aquabot
Next for THE Aquabot is maybe making an actual version of the robot, and training it using Python and AI, instead of it just being a model and a simulated video of our idea.

Log in or sign up for Devpost to join the conversation.