-
-
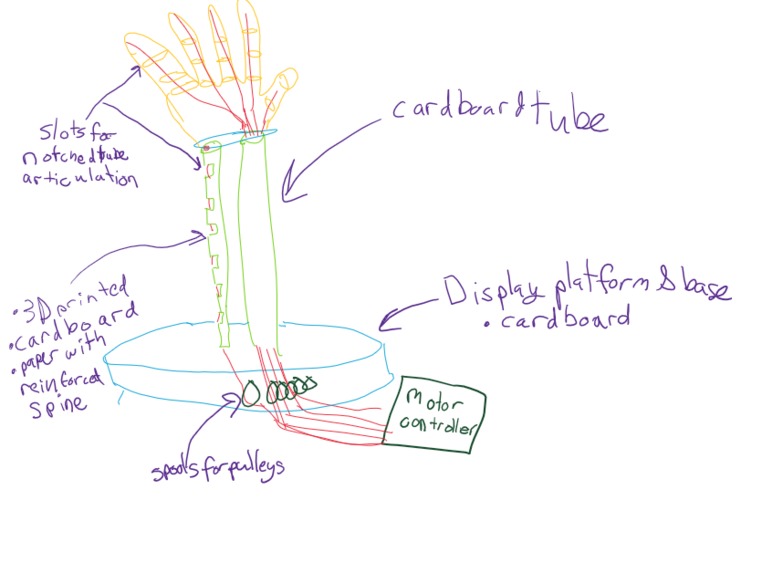
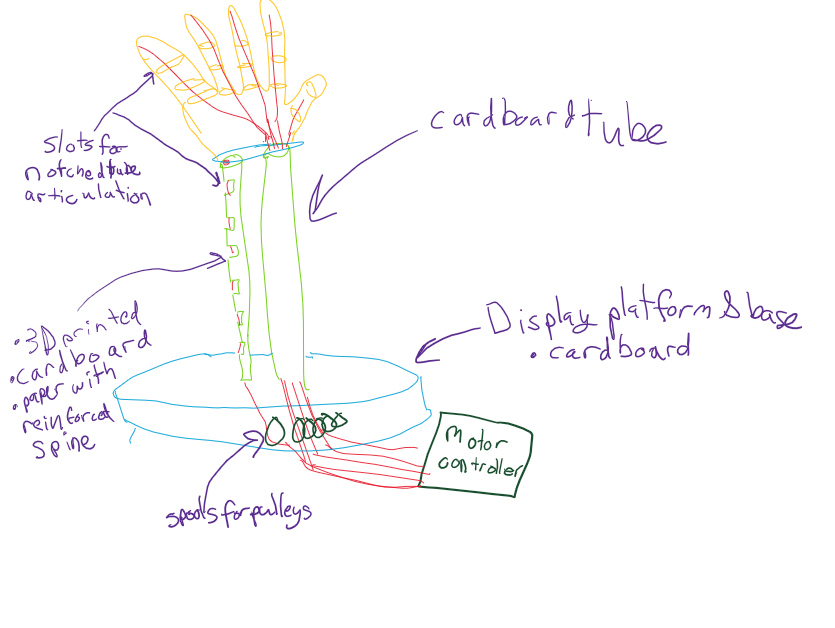
The original sketch of the model
-

Notched Tube for wrist
-

Assembled Hand
-

Pizza Boxes used for materials



Inspiration
In the realm of robotics, wrist actuation to replicate the human forearm has been a difficult to figure out. We set out to create a general model of a potential actuation approach to hand movement based around the traditional tension driven method but using a notched tube to actuate the wrist.
What it does
This model is controlled using tension strings. Although it does not currently contain any, it's design makes it possible to implement electronic control in future iterations.
How we built it
This model was assembled using cardboard cut into desired shapes and adhered together with hot glue.
Challenges we ran into
With a limited budget and lack of resources, it was difficult to come up with a project that could demonstrate a useful idea.
Accomplishments that we're proud of
The entire project was made of recycled materials which makes it possible for educators to recreate on a tight budget as well as giving researchers a visual representation of the concept..
What we learned
Access to materials is not the highest priority, having money and equipment does not guarantee success. Earning your place based on the knowledge you have aquired is far more valuable to yourself than placing high in a ranked competition.
What's next for Tension Driven Mechanical Hand
Next steps would be to revise some of the mechanics to maneuver the wrist and fingers in the desired fashion. I would also like to add an element of electronic control via Matlab and a system of servos to allow for autonomous demonstrations.
Built With
- cardboard
- hot-glue
- string

Log in or sign up for Devpost to join the conversation.