-
-
3D printing
-
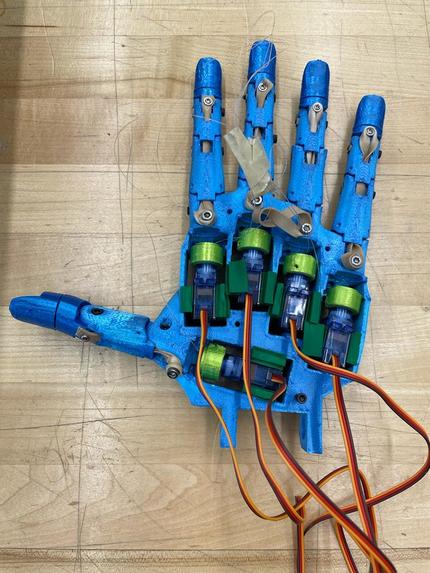
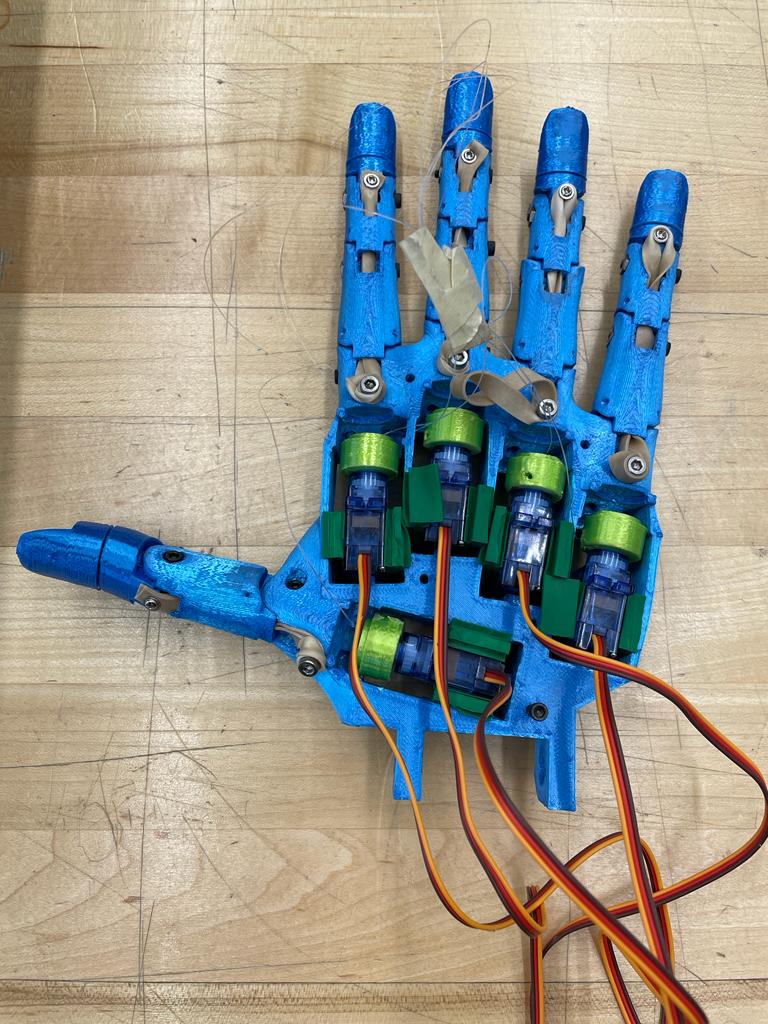
Robotic Hand
-
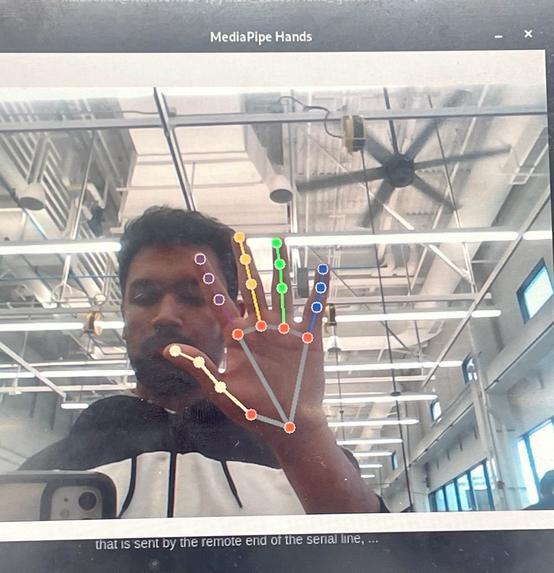
Gesture recognition
Inspiration:
Work in hazardous environments such as the Nuclear waste disposal, Contagious disease response, Mining etc are often hazardous to health and life. So, to eliminate the risk in this process, we propose a teleoperative solution were the operator is able to control the robot remotely.
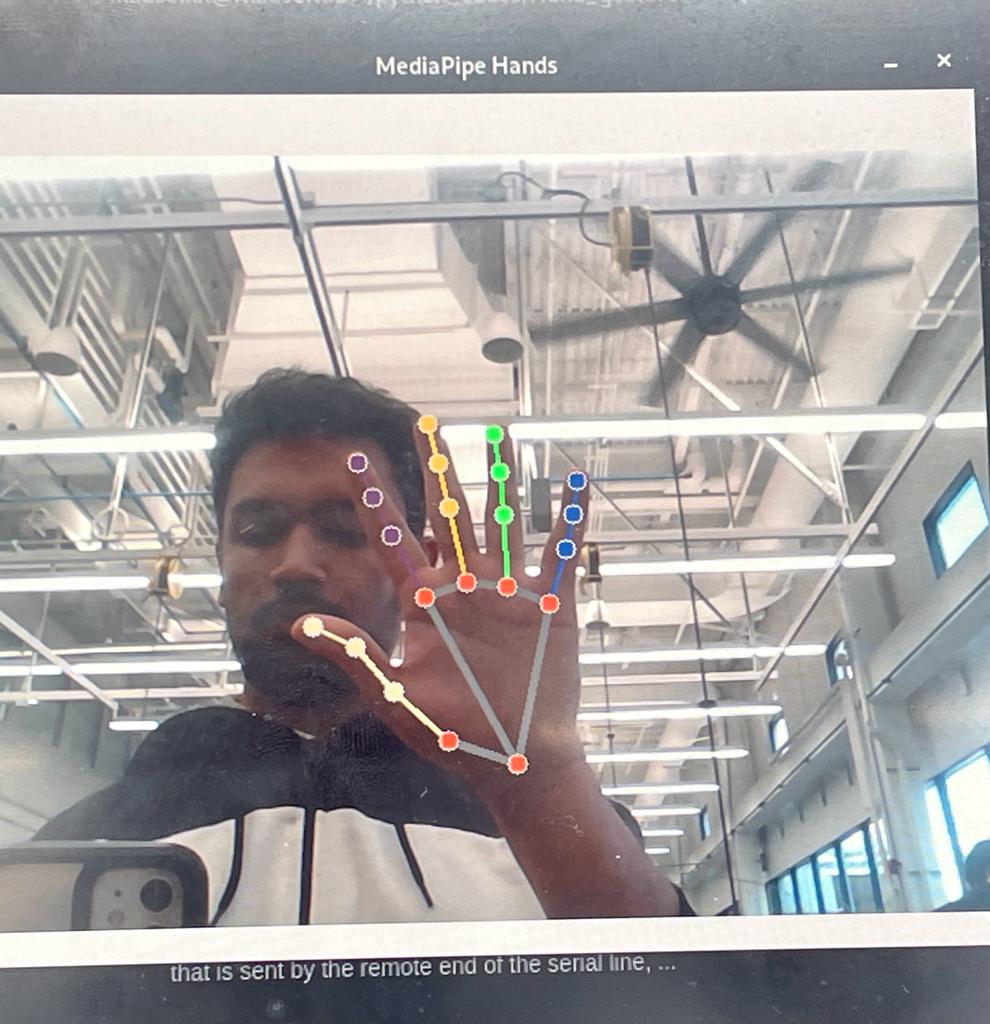
What it does:
The Objective of the project is to help operators work from remote location using state of the art tech with VR based visual feedback. In this project a robot hand is remotely operated with hand gesture control and a camera mounted on a servo motor, to provide visual feedback. The robot works by capturing the movements of the person’s head using an IMU sensor and converting those movements into instructions for the robot.
How we built it:
CAD design, Prototyping, and Assembly of mechanical components Software framework development and interface design Electrical controller setup with sensors and actuators Interfacing software and hardware
Challenges we ran into
Cross platform (OS) communication Low torque motors for medium torque application 3D print quality and time Software interfacing
Accomplishments that we're proud of
Mediapipe based gesture tracking Teleoperative closed loop control
What we learned
Python and Arduino interfacing Mediapipe framework Design for assembly
What's next for Tele Operated Robot for assistance in hazardous environments
Better controllers and feedback system Enhanced DOFs for extended applications Proper VR solution based on 5G technology in place of YouTube based VR Feed Better system design and dynamic control Higher resolution electronics
Built With
- 3dprinting
- arduino
- caddesign
- cura
- lasercutting
- mediapipe
- python

Log in or sign up for Devpost to join the conversation.