-
-
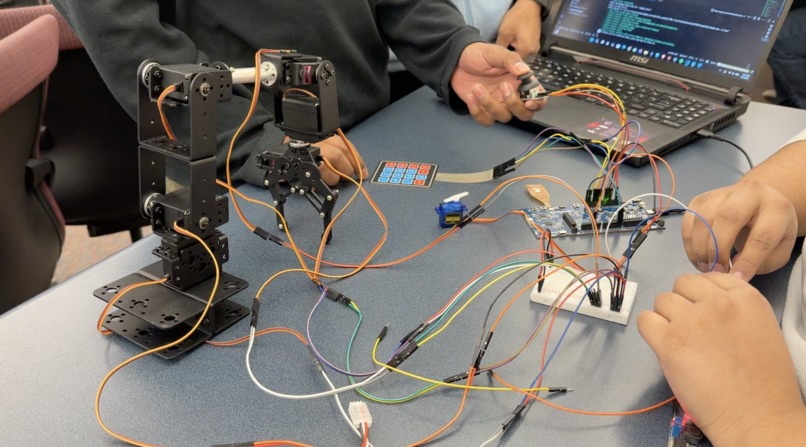
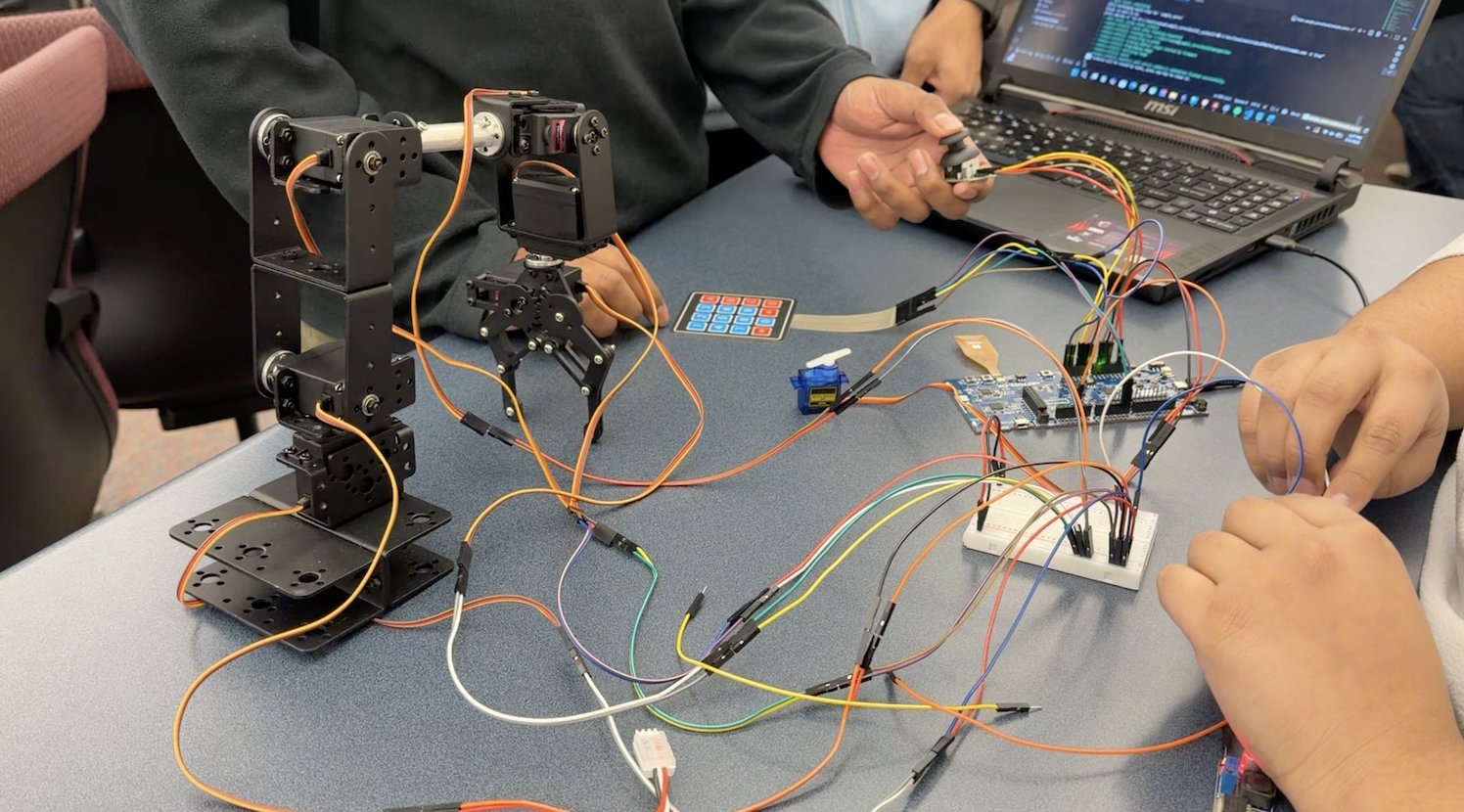
Project Demo
-

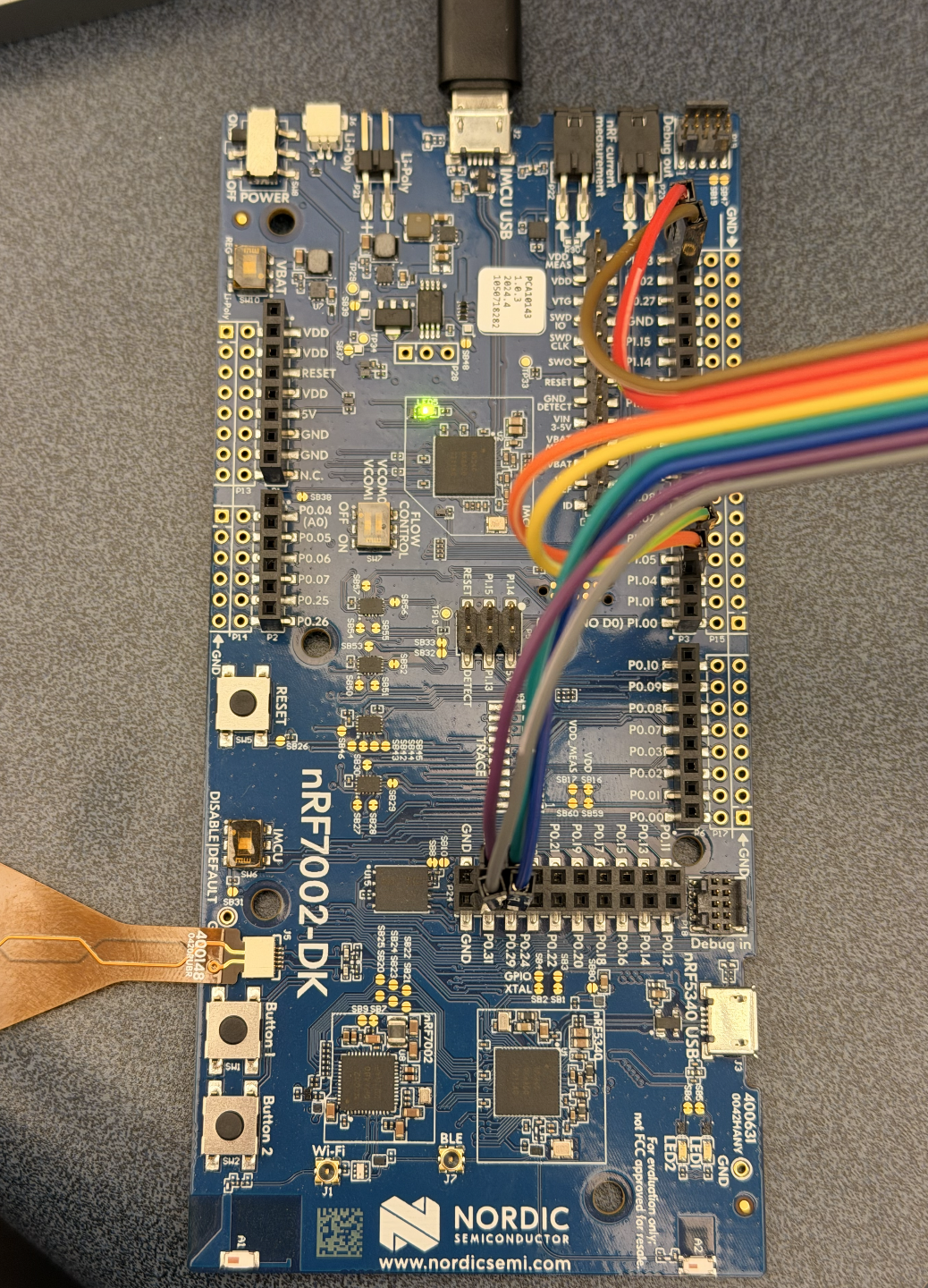
Board
-
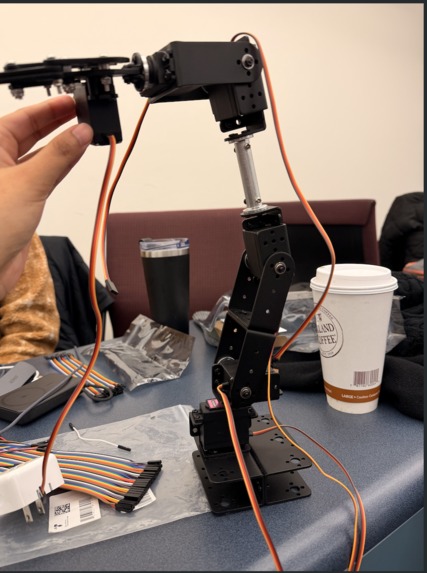
Robotic Arm
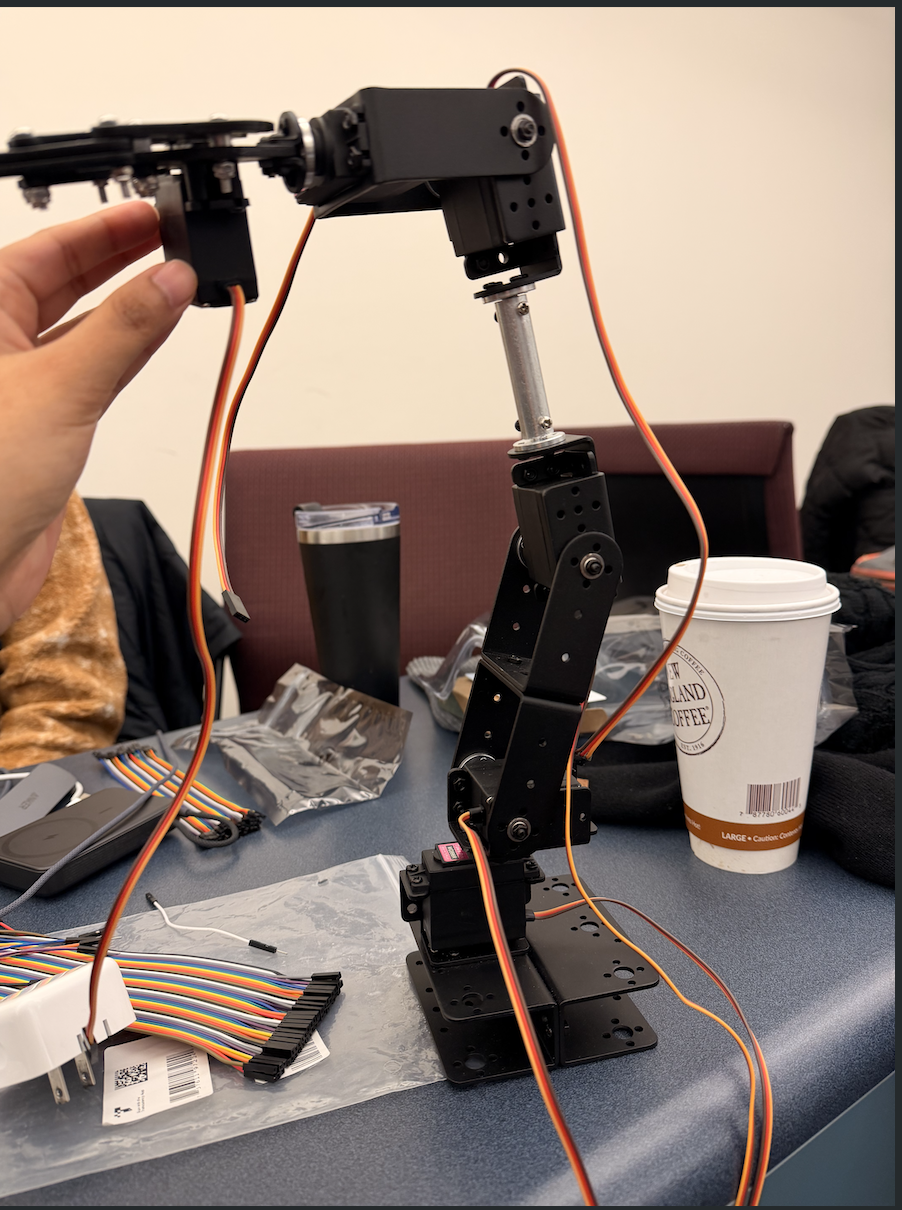
Inspiration
We were inspired by the challenges faced in industrial automation and assistive technology. Traditional robotic arms require complex programming or specialized controllers, making them inaccessible for rapid prototyping and adaptable control.
What it does
Our system lets you control a 6-motor robotic arm using familiar interfaces:
Joystick: Move individual motors with precision (12-bit resolution) Joystick Button: Switch between 6 motors (Base, Shoulder, Elbow, Wrist, Gripper, Rotate)
Keypad:
- Press 1 to open gripper
- Press 2 to close gripper
- Press 3 to reset position
- Press A to complete tasks
IR Sensor: Detects obstacles and prevents collisionsNordic nRF7002-DK: Processes all inputs in real-time with under 100ms response.
How we built it
Hardware: Nordic nRF7002-DK microcontroller connected to analog joystick (ADC), matrix keypad (GPIO scanning), IR sensor (digital input), and 6 servo motors.
Software: Built custom drivers in Zephyr RTOS for each component. Modular code architecture with separate files for keypad, joystick, and sensor control.
Power: Used 7.4V battery for servos; tested with lower-torque motors due to current constraints.
Demo: Created SolidWorks simulation to show what the full-power arm would do.
Challenges we ran into
Power Limitations: High-torque servos need 15A total; nRF board can't supply that much current. We tested with smaller motors and built a simulation instead.
Accomplishments that we're proud of
- Successfully integrated 3 different input types on one microcontroller
- Created a complete control system despite hardware limitations
- Used Nordic's 12-bit ADC for precise analog control
What we learned
We gained hands-on experience with embedded systems development, learning GPIO multiplexing, ADC configuration, and Zephyr RTOS on the Nordic nRF7002-DK platform. Through systematic debugging, we discovered hardware limitations like pin conflicts and power constraints and learned to adapt our project scope when facing technical challenges while maintaining core functionality.
What's next for Team S.U.R.J. - Robotic Arm Control
We plan to upgrade to a high-current power supply to enable full-torque servo operation, leverage the nRF7002's built-in WiFi for remote wireless control and integrate computer vision for object recognition.
Built With
- c
- matlab
- nrfboard
- solidworks
- visual-studio

Log in or sign up for Devpost to join the conversation.