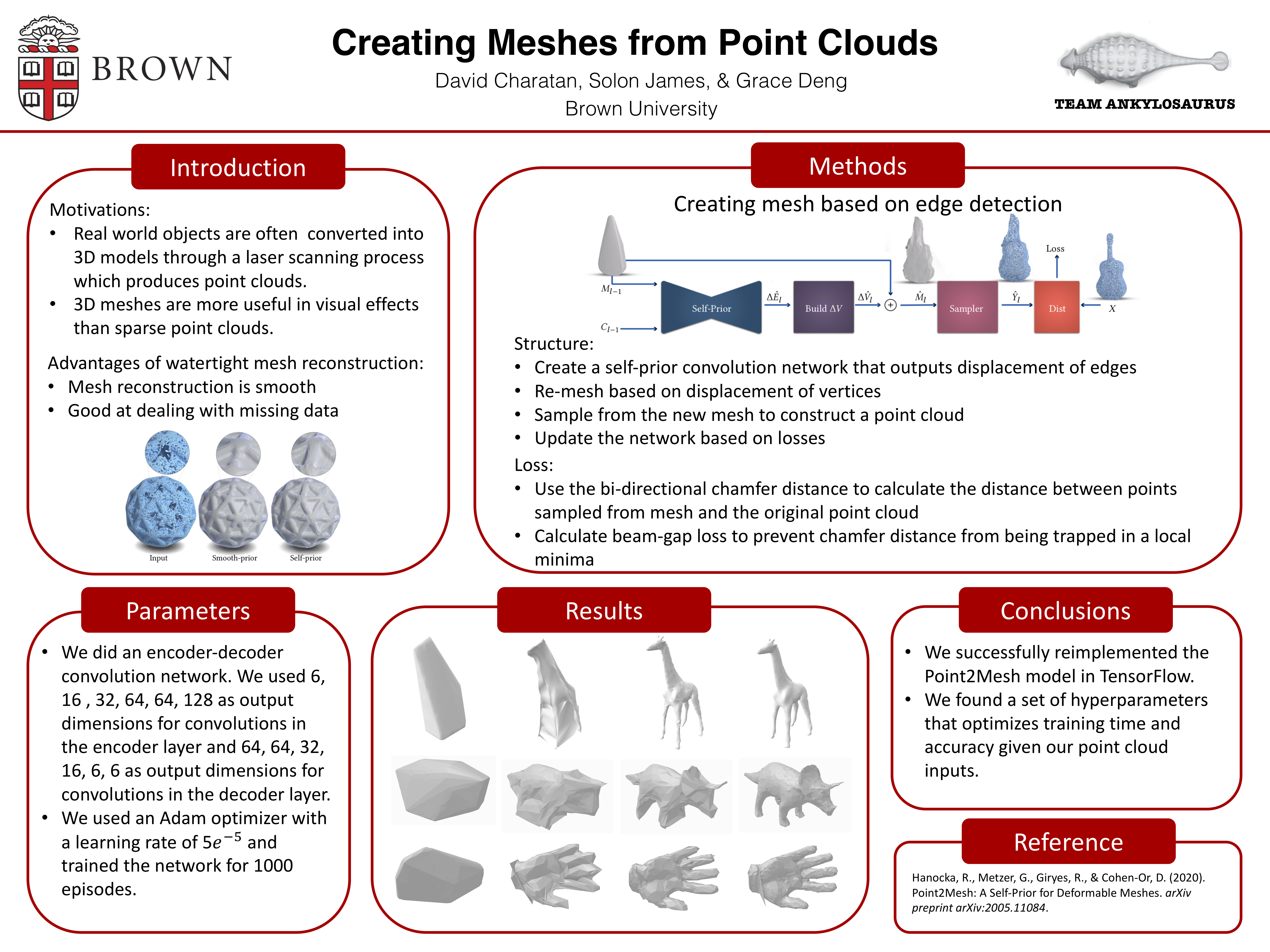
Point2Mesh: Turning Point Clouds into Meshes with Neural Networks
This is a reimplementation of Point2Mesh: A Self-Prior for Deformable Meshes by Rana Hanocka, Gal Metzer, Raja Giryes and Daniel Cohen-Or. It uses convolutional neural networks (adapted for meshes) to shrink-wrap meshes around point clouds. Watch our video or take a look at our poster to learn more!
Project Proposal
https://docs.google.com/document/d/1a4a45bPWBrISA9RBdINrpJnNSSWzRVHE_Zvs0IRUZ98/edit?usp=sharing
Final Write-up
https://docs.google.com/document/d/1Q7iEyYqiZG9tiCgu9R-4uabK6el1sa9CSbcZdlTMW0g/edit?usp=sharing
Built With
- python
- tensorflow



Log in or sign up for Devpost to join the conversation.