
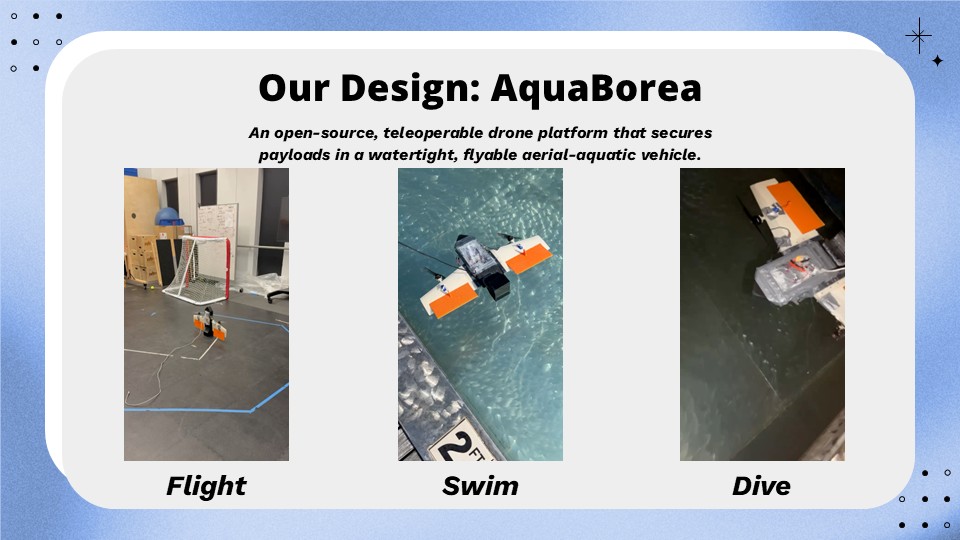
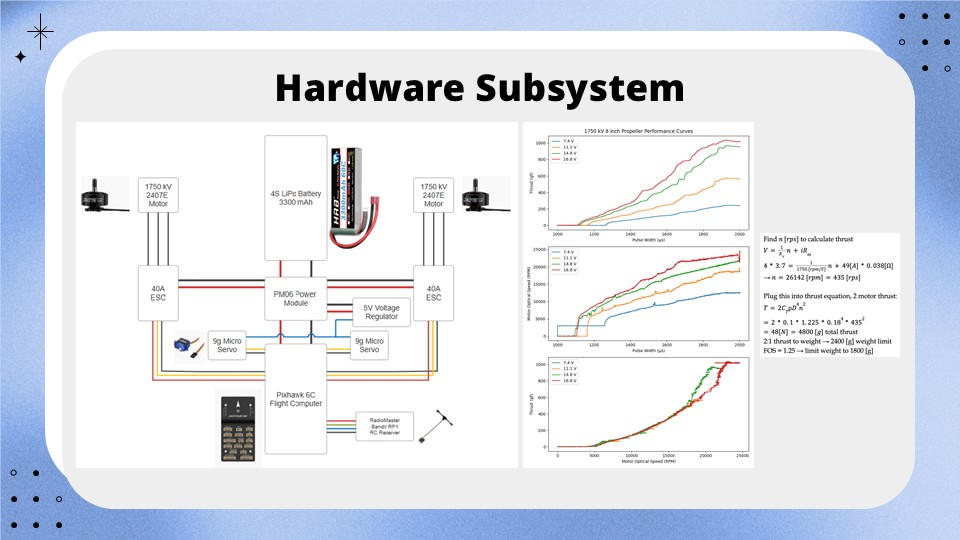
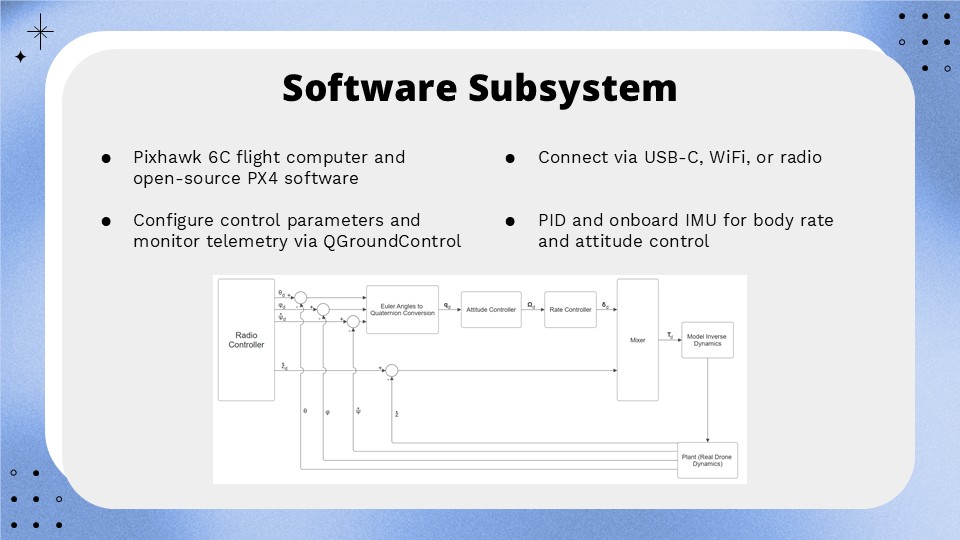
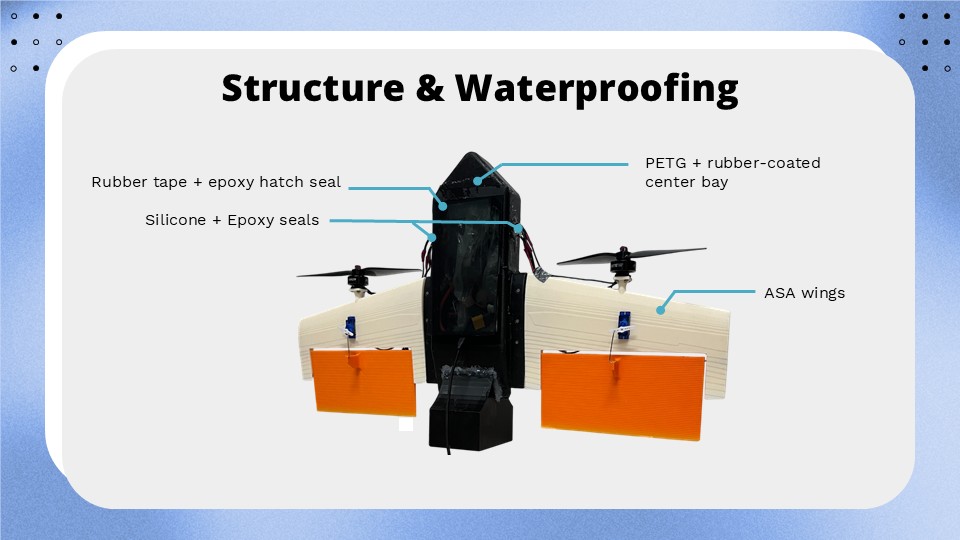
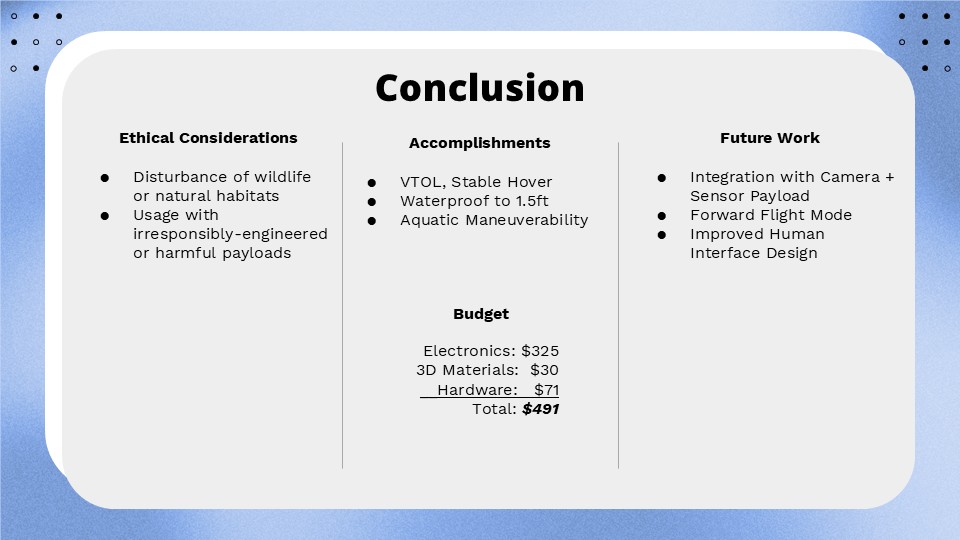
This report introduces AquaBorea, a bicopter tail-sitter drone that is capable of both flight and underwater maneuverability. As a tail-sitter, AquaBorea has vertical take-off and landing (VTOL) with forward-flight capabilities in both in air and in water. This drone will have the benefits of a quadcopter in its hover mode while having the maneuverability and long-distance efficiency of any other fixed-wing aircraft. We describe the design of AquaBorea and provide both a real model as well as a CAD rendering. In this report, we also develop a model of AquaBorea in aerial situations and determine suitable control laws in this situation. We also demonstrate the potential of our model to fly, proven by thrust curves and calculations based on thrust equations. Further, the electronics and feedback control have been implemented and tested.
Built With
- python
- ros

Log in or sign up for Devpost to join the conversation.