



Inspiration
We are building a drone platform that performs autonomous cleanup of litter. Litter is a growing problem, and the amount of plastic waste on beaches has increased by as much as 165% since 1969.
Technology
The project consists of a drone with a mechanical robot manipulator mounted at the bottom, enabling the drone to pick up objects, and a vision module that enables VIO and localization, as well as object detection and tracking. GPS and LIDAR are used for coarse localization, the vision module identifies target objects and determines a path for the drone and the object is carefully lifted by the arm and delivered to the destination for processing. The entire procedure will be stable and fully autonomous, thus presenting a scalable solution to the problem of beach litter.
We are using a Tarot X6 hexacopter drone with 18 inch propellers, a Pixhawk for control, a Jetson for the onboard autonomy and will also have full RC control as a means of emergency manual takeover. As of December 2020, the drone is being built and the custom manipulator has been designed. We expect drone assembly and arm fabrication to be complete by the end of January 2021, with basic maneuvers successfully demonstrated.
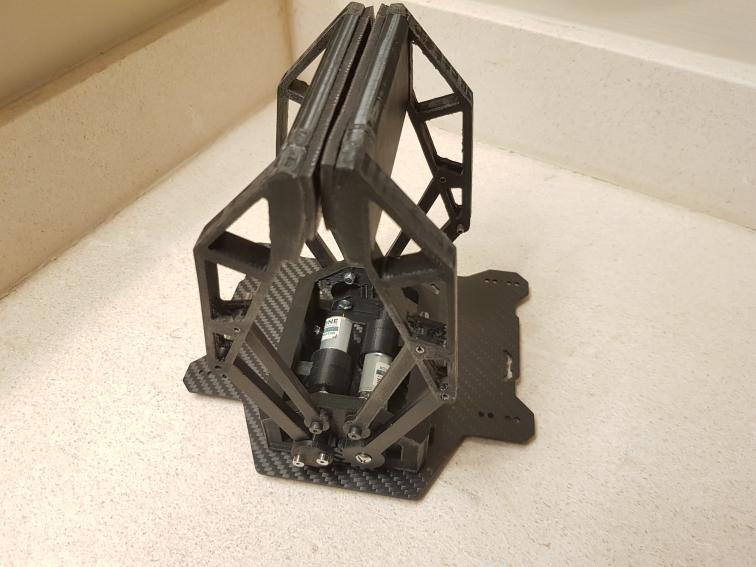
The arm will be initially prototyped from 3D-printed PLA and finally produced using higher-quality 3D printed material. It will be modularized and easy to assemble, lightweight while being strong enough to withstand expected loads.
Built With
- drones
- python

Log in or sign up for Devpost to join the conversation.