-
-

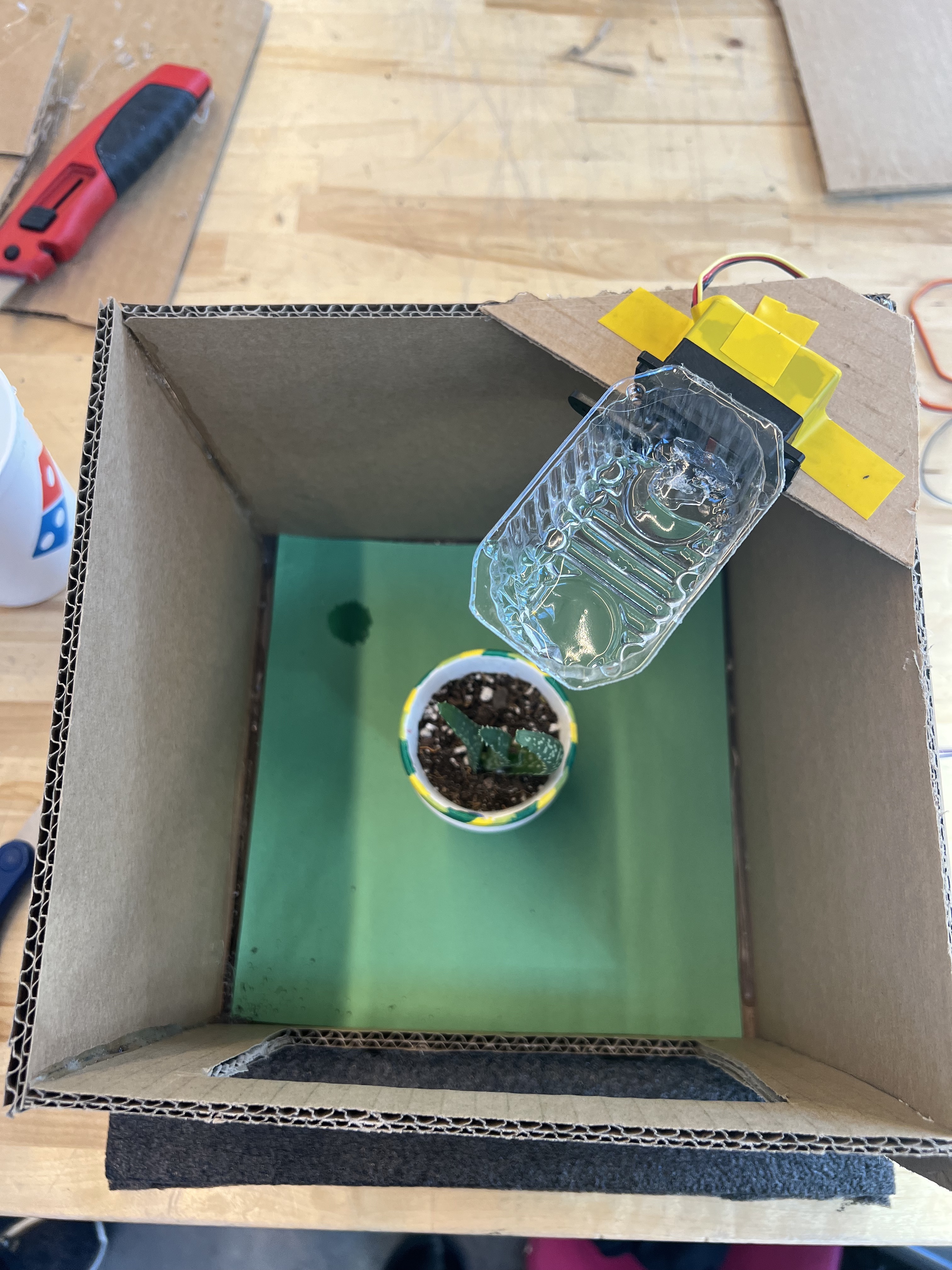
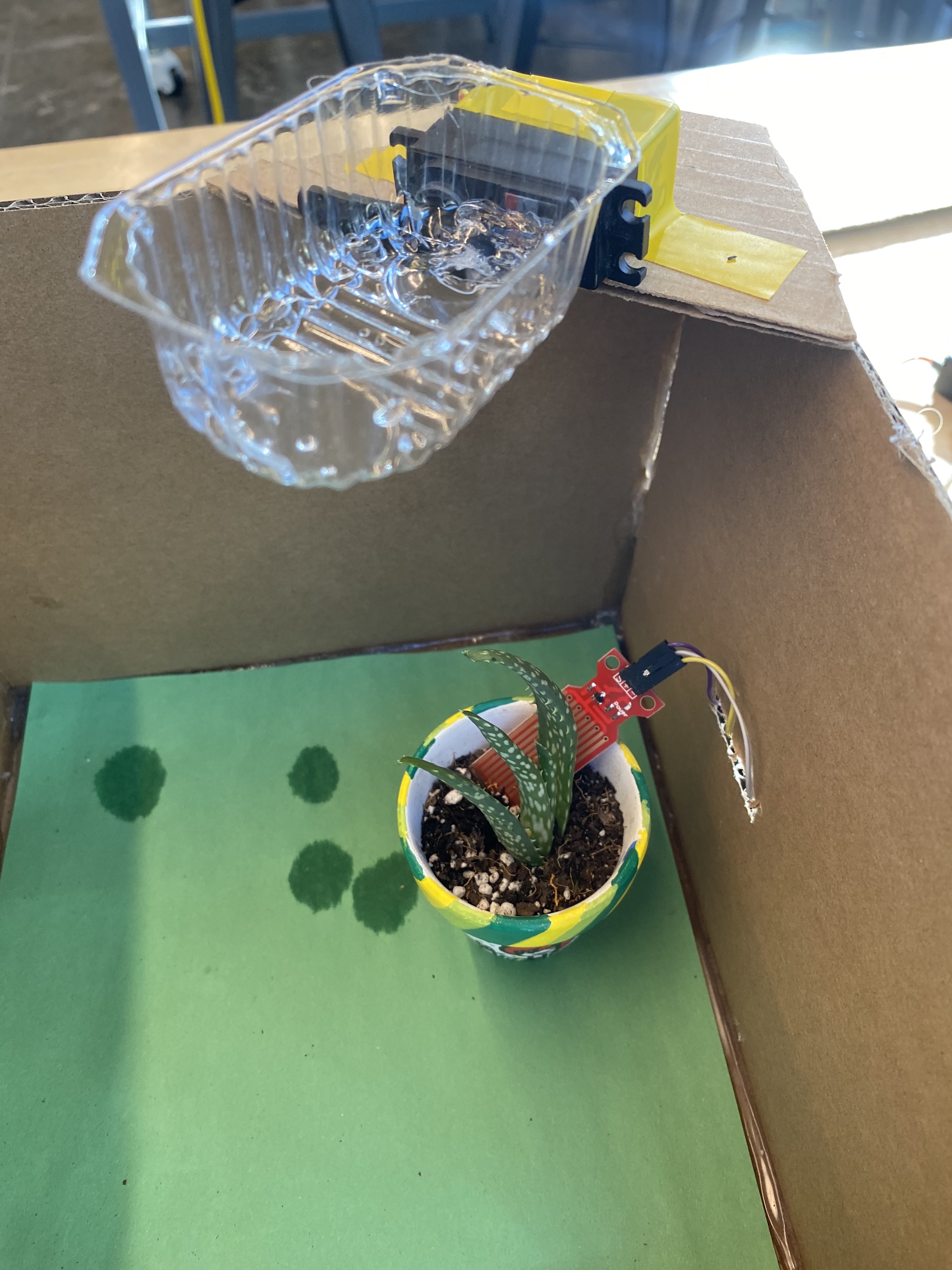
The plant inside our environment. Environment created out of cardboard, styrofoam, paper.
-

The water sensor placed into the soil closest to the plant.
-
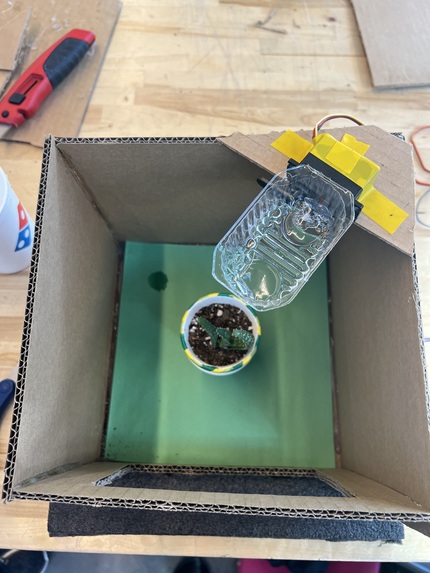
The water bucket hanging above the plant. Servo is attached to bucket and programmed to turn 180 degrees when water level dips below 3.
-

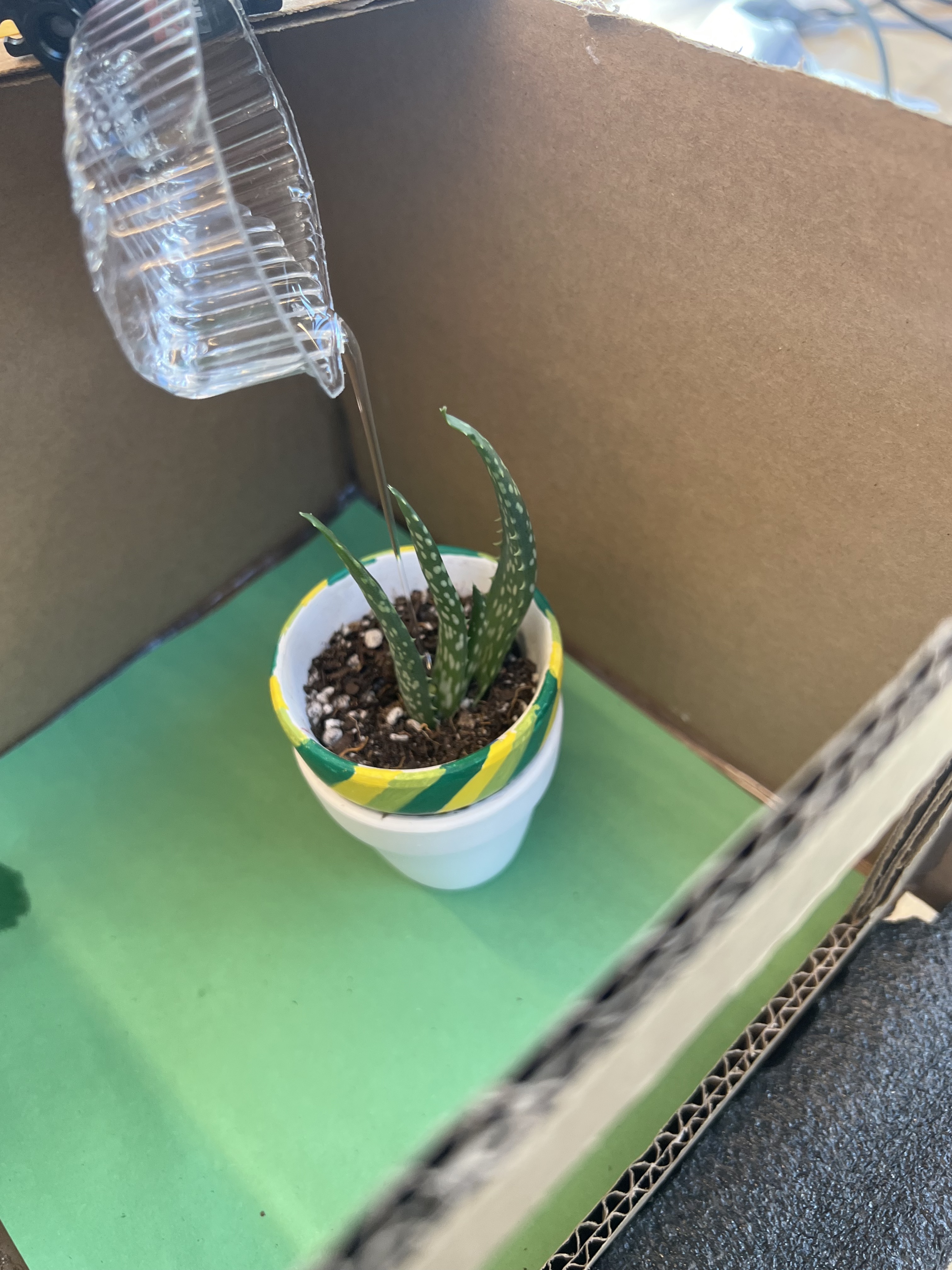
Bucket in process of turning to water the plant.
-
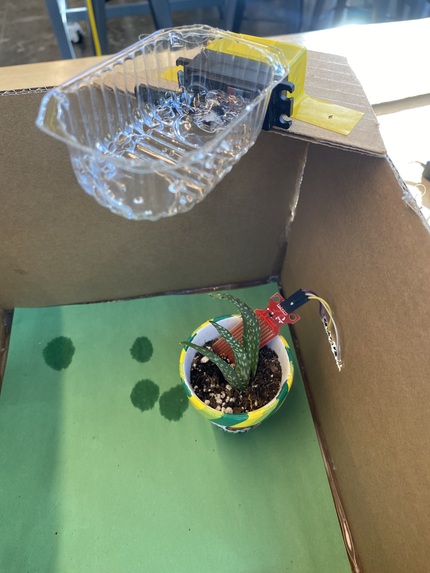
Bucket returns to original position with servo.


Inspiration
Two of our team members have our own gardens in our dorm and apartment. Since we are busy students studying engineering and business, we often forget to water our plants. And when we do, we often overwater them. This not only wastes water, but also harms our plants. We wanted to build a robot that would water our plants the perfect amount based on how much water the plants actually need.
What it does
Tartan Garden combines the methods of drip irrigation and manual irrigation to water a plant. It uses a water sensor to detect when the water level in the soil is below level 3. When it is below level 3, a bucket of water is poured onto the plant.
How we built it
We built Tartan Garden using an Arduino, its water sensor, and a servo. The water sensor is placed into the soil closest to the plant's base. The servo is hung over the plant and connected to a cup of water. Every time the water sensor detects low moisture in the soil (< level 3), the servo will turn and water the plant. Then, the servo returns to its original position ready to be filled with more water. Depending on your plant, the size of the bucket of water will differ, but in our demonstration the cup holds ~5 fluid oz of water.
Challenges we ran into
We ran into challenges when programming the servo. Since we did not have a lot of experience using Arduino, programming the servo to turn in accordance with the water sensor levels was new and difficult for us.
Accomplishments that we're proud of
We are proud of working as a team to bring our vision to life. The physical diorama box turned out exactly as we envisioned. Furthermore, we are proud of trying something we knew would be challenging since we were not very familiar with Arduino going into this project.
What we learned
We learned a lot about programming with C++ to make our robot function the way we wanted it to. Also, we learned that asking for help is very important. Through trips to the help desk, we found answers to our questions and got through places we were stuck at in the project.
What's next for Tartan Garden
Our team wants to create different versions of Tartan Garden to accommodate for gardens of different sizes. We also look forward to incorporate settings for different soil types and fertilizers. Our team can see Tartan Garden having an app paired with the robot so users can be aware of when their plants are getting watered. This will help users know when to refill their watering bucket.

Log in or sign up for Devpost to join the conversation.