Inspiration
In the healthcare sector, robotic manipulators are an already existing approach that providers use for minimally invasive procedures (MIS). While extremely precise and helpful, the complexity of these robots results in prohibitively high costs, denying lower-resource hospitals access to such a valuable tool. Additionally, surgeries require a sterile environment to ensure patient safety; the manipulator's complexity and reusability risk compromising its ascepticity during operations.
TArmU aims to mitigate these issues. Its modularity and simplified design result in system costs cut by at least 70%, significantly reducing the barrier to entry for low-resource hospitals. This modularity, alongside the use of disposable end-effectors, reduces the number of contamination points and subsequently the risk of infection.
What it does
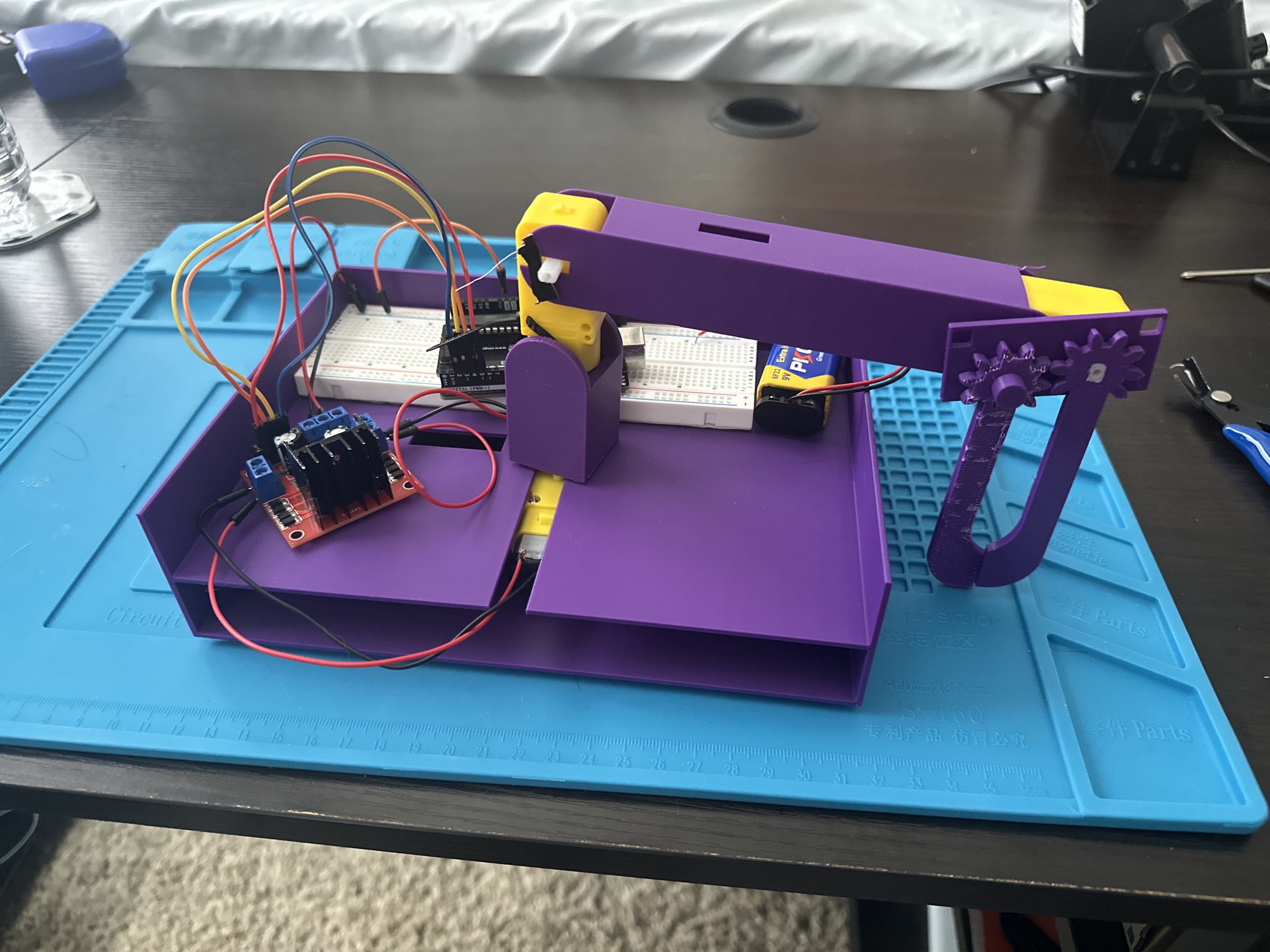
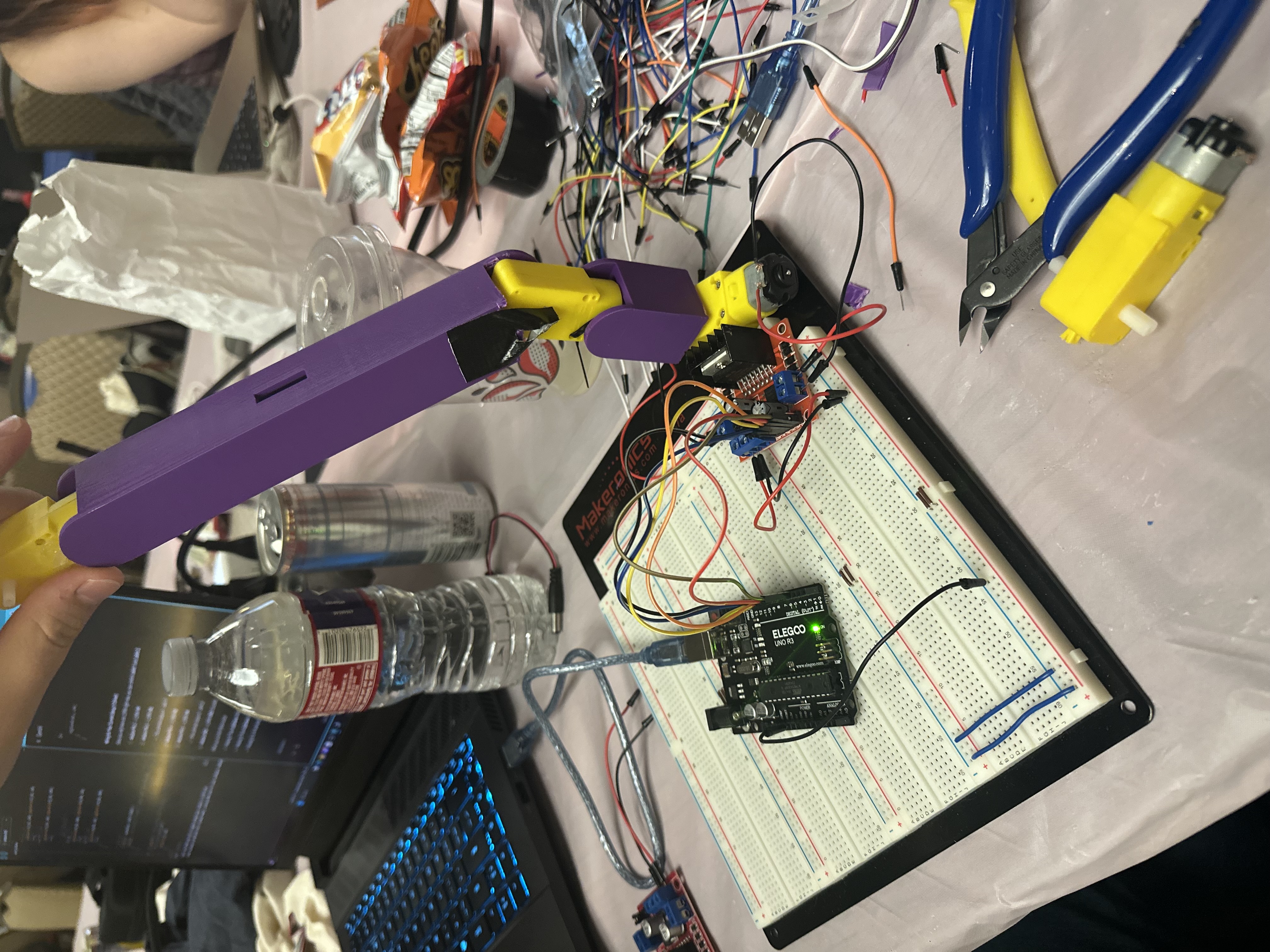
TArmU is a 3-DoF robotic manipulator designed to assist surgeons in performing operations/procedures. It consists of 4 motors, 2 linkages, an end effector, and a base. Three of the motors are responsible for controlling the rotation of the joints/base, while the final motor controls the end effector to manipulate surgical tools.
How we built it
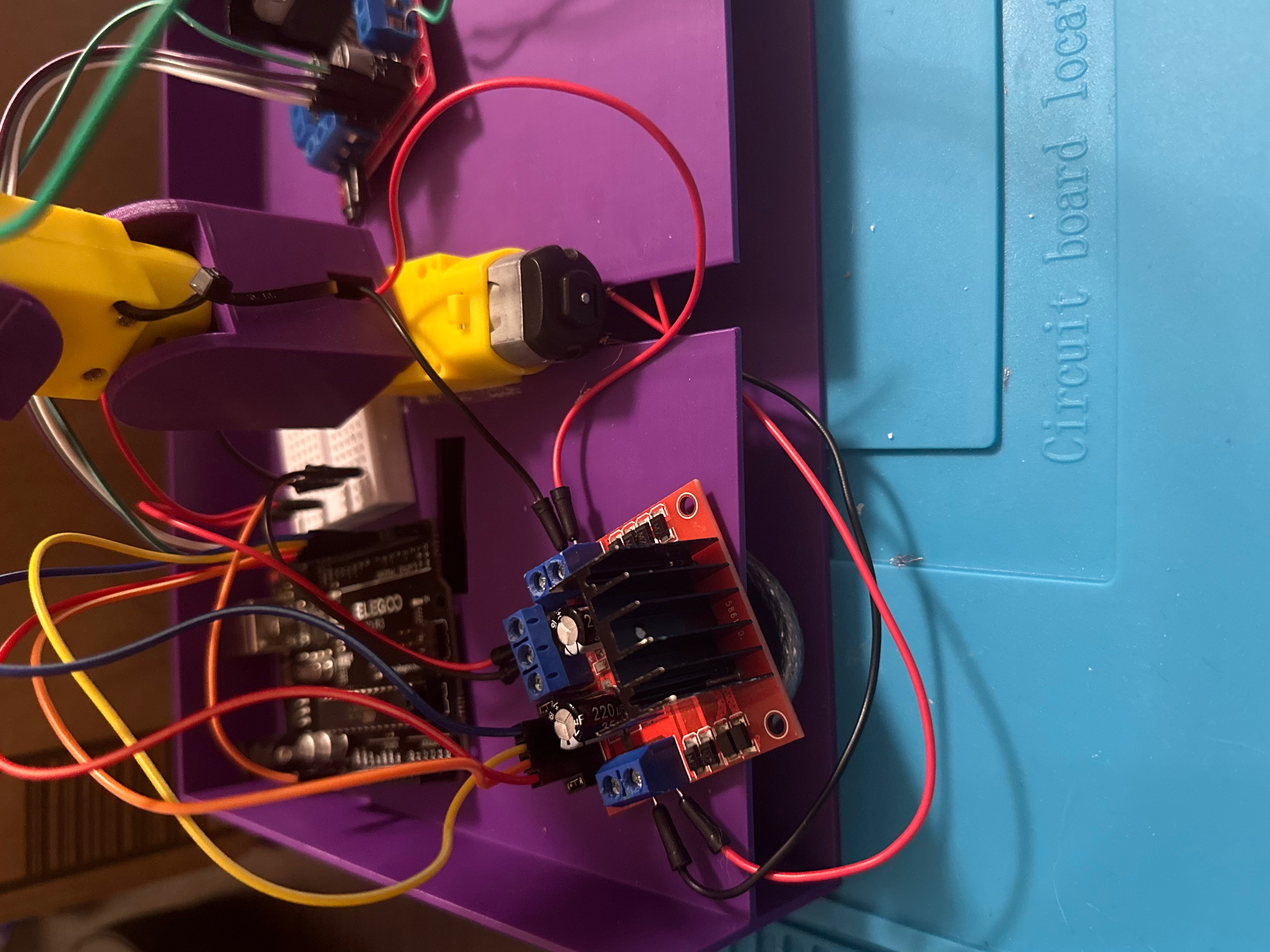
The entire arm is controlled by an Arduino UNO R3. The four motors are wired to two L298N motor drivers that are in turn connected to the microcontroller. The system is powered via a USB connection to a computer, as well as an external voltage source. The Arduino relies on a Python script that translates the user's inputs into motor movements.
Challenges we ran into
Python script: The Python script reading user inputs incorrectly interpreted certain inputs (ex. pressing down arrow results in the Arduino switching to controlling the second joint instead of rotating the current joint downward).
Arm link issues: The motor at the base joint was responsible for supporting the weight of the entire kinematic chain. The arm links required multiple adjustments and reprints to reduce excess weight.
Wiring: The entire arm system of motors, drivers, and microcontroller required extensive wiring to connect the individual parts and ensure the arm functioned as intended. The large number of wires needed for this required us to re-evaluate our design to reduce clutter and potential points of failure.
Accomplishments that we're proud of
We managed to assemble most of the manipulator in the 6 hours given at Saturday's event. Even after numerous reprints, we achieved full control of the arm's joints and end effector.
What we learned
Batteries/external voltage sources need frequent checks to ensure sufficient power is delivered.
Check the torques of the motors used beforehand/find more powerful motors.
Do not wait until the day of the event to 3D-print parts.
3D printers are heavy.
What's next for TArmU
Implement translational and rotational hand controllers instead of relying on keyboard inputs, and adapt the control algorithm to read controller inputs.
Switching to stronger motors less prone to failure and more capable of supporting the full kinematic chain.
Built With
- 3dprinting
- arduino
- onshape
- python




Log in or sign up for Devpost to join the conversation.