-
-
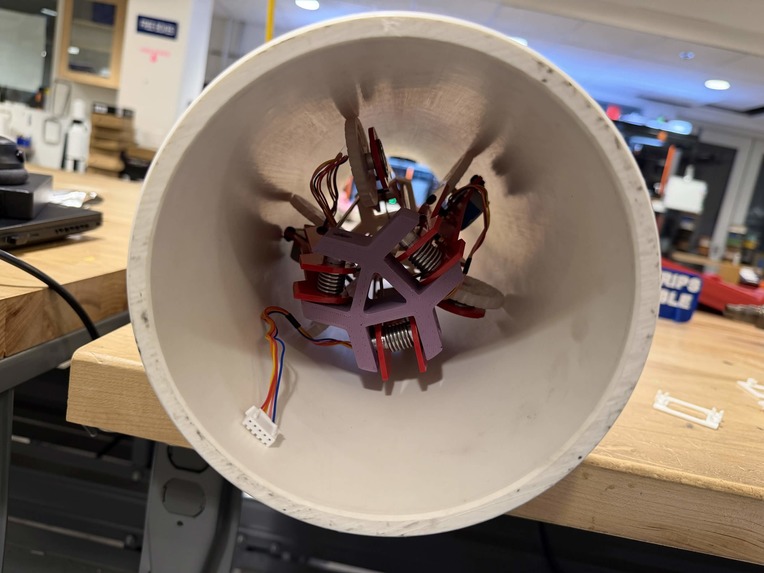
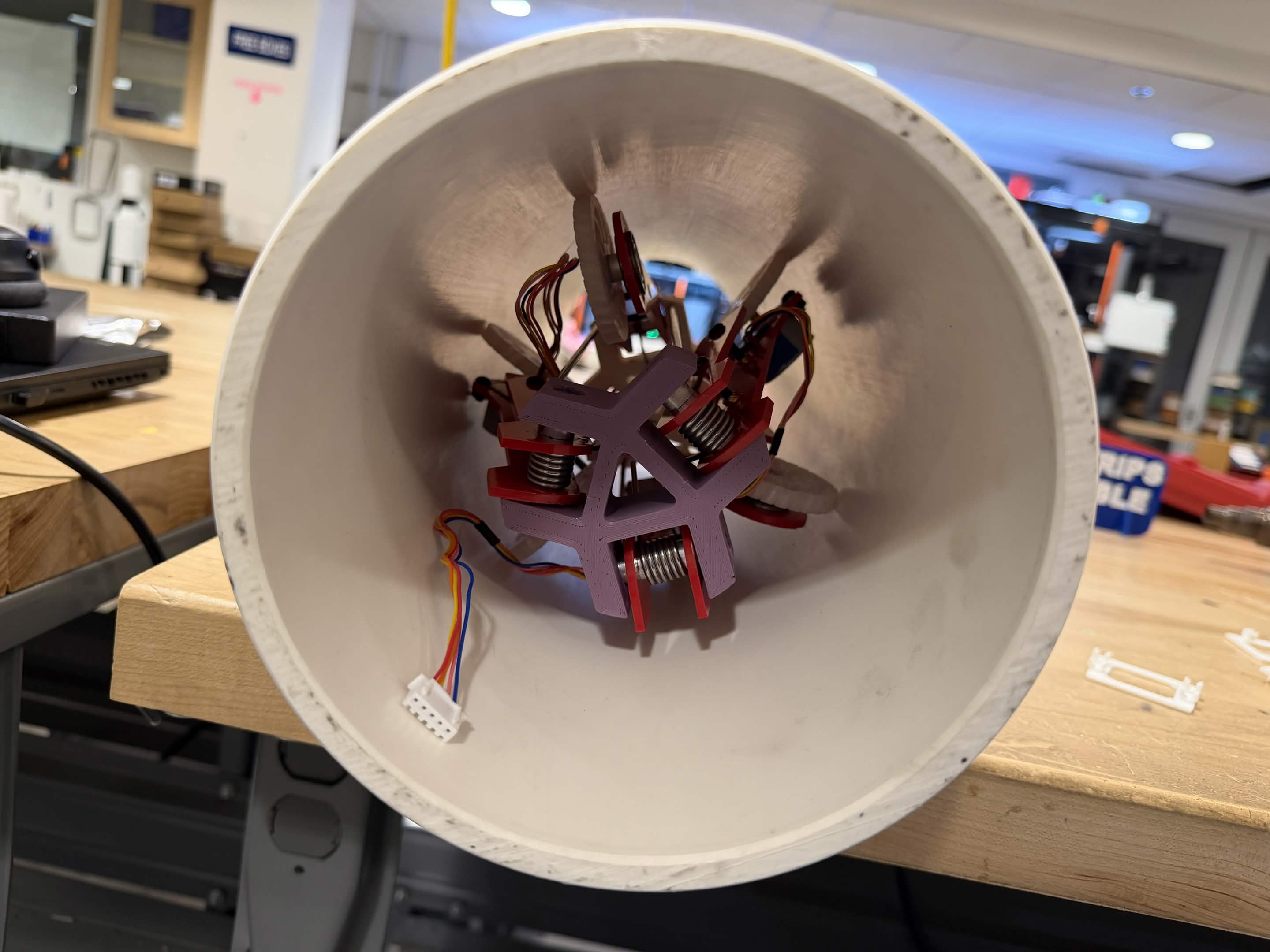
TAP contained inside an 8" diameter pipe
-
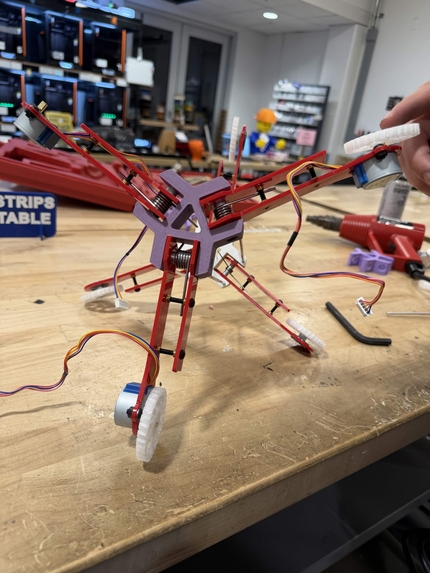
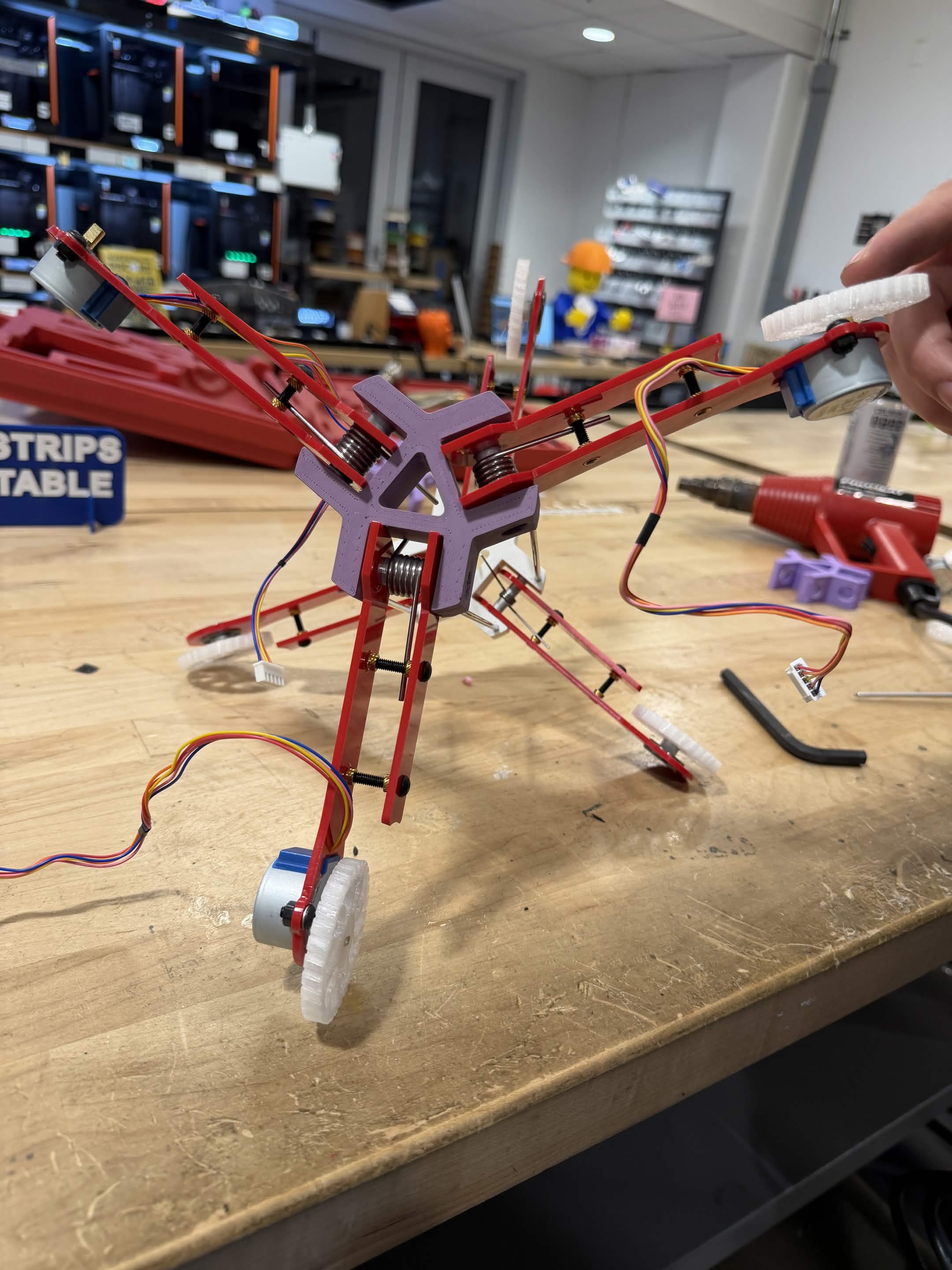
TAP free from the confines of its pipe
-
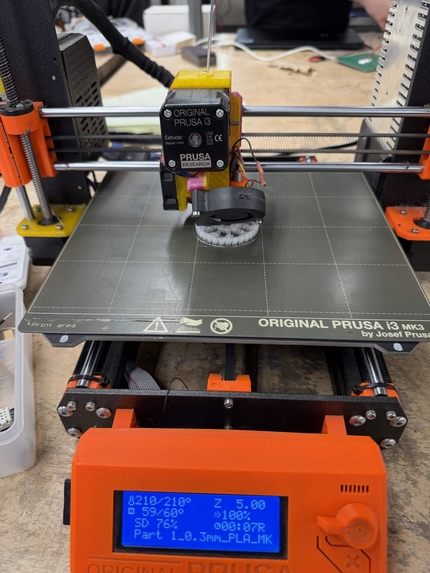
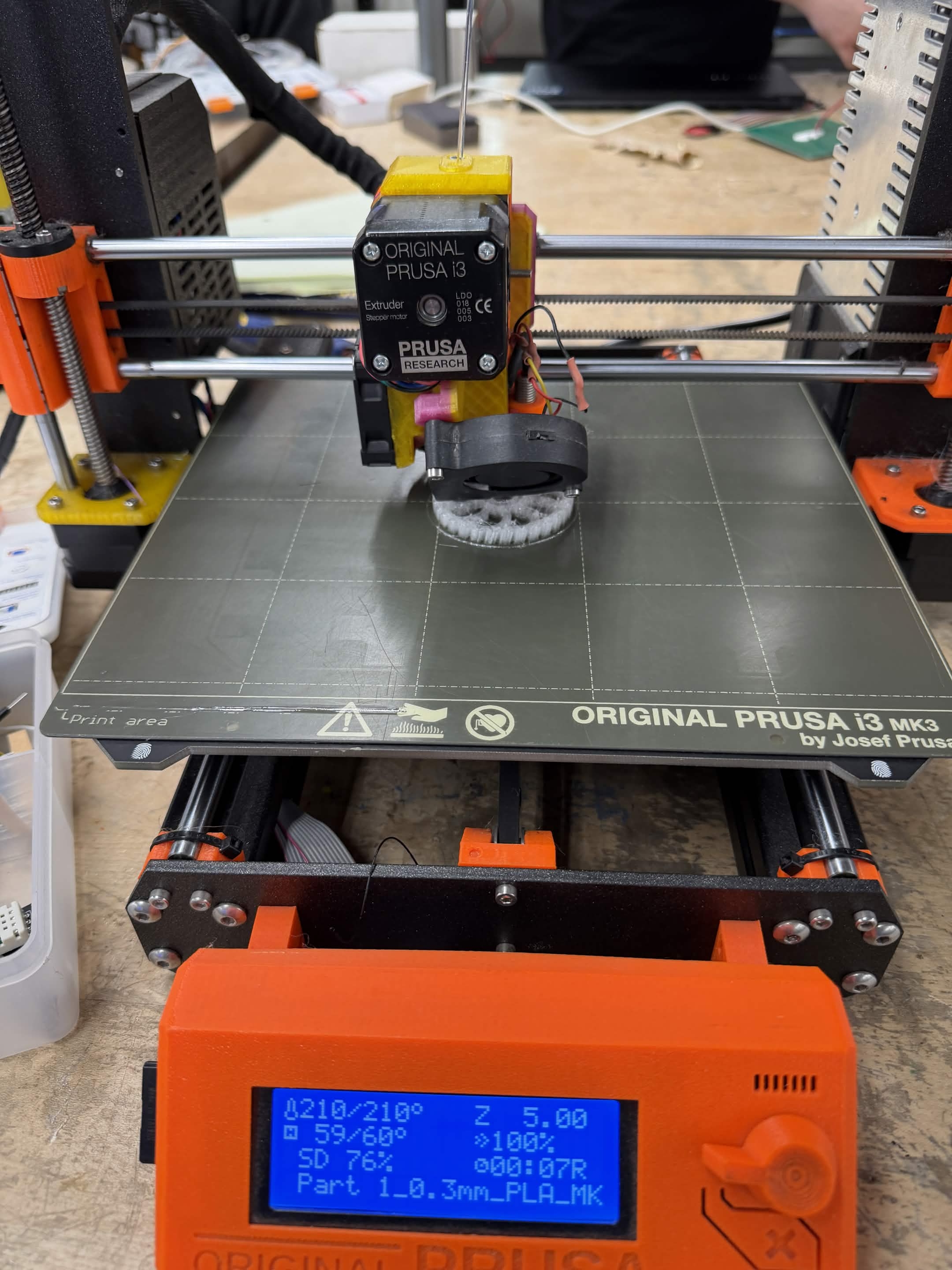
Custom flexi-wheels printed from TPU
-
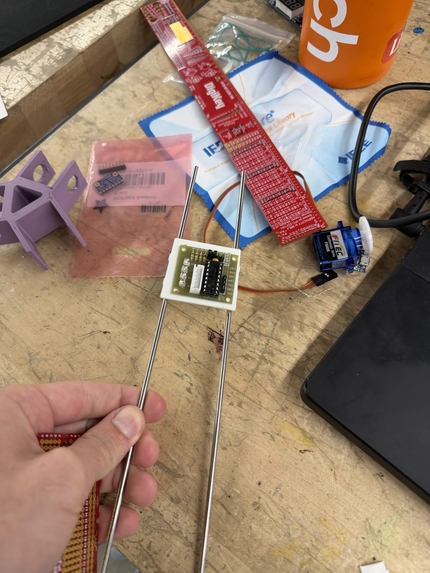
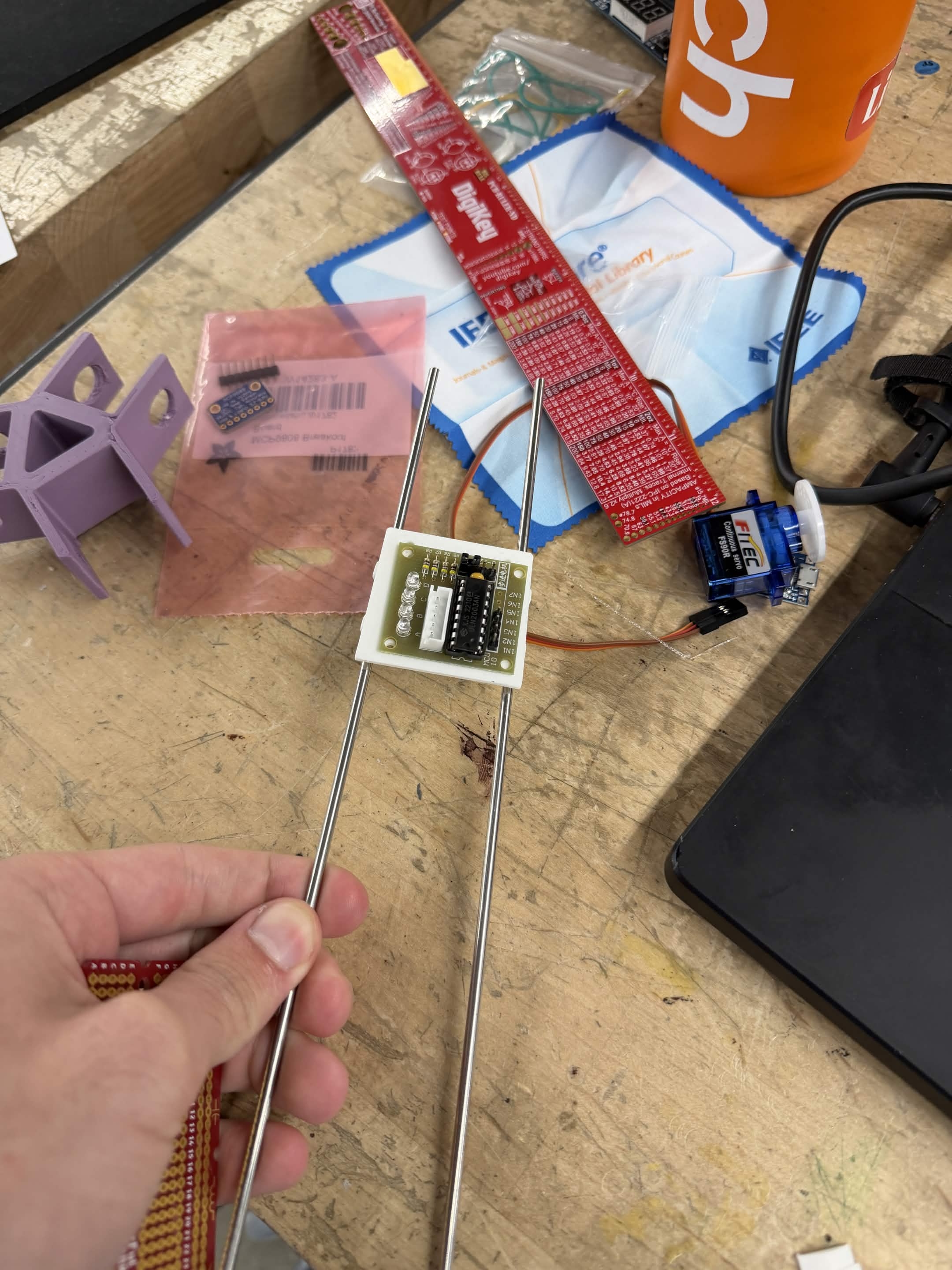
Stepper driver mounting system
-

TAP upright on a table
-

Creation of acrylic-paneled legs
-
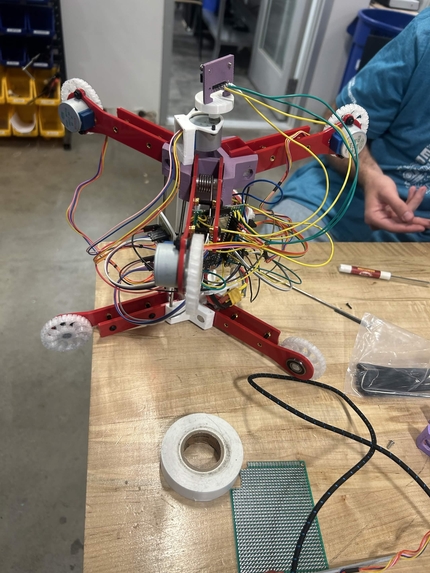
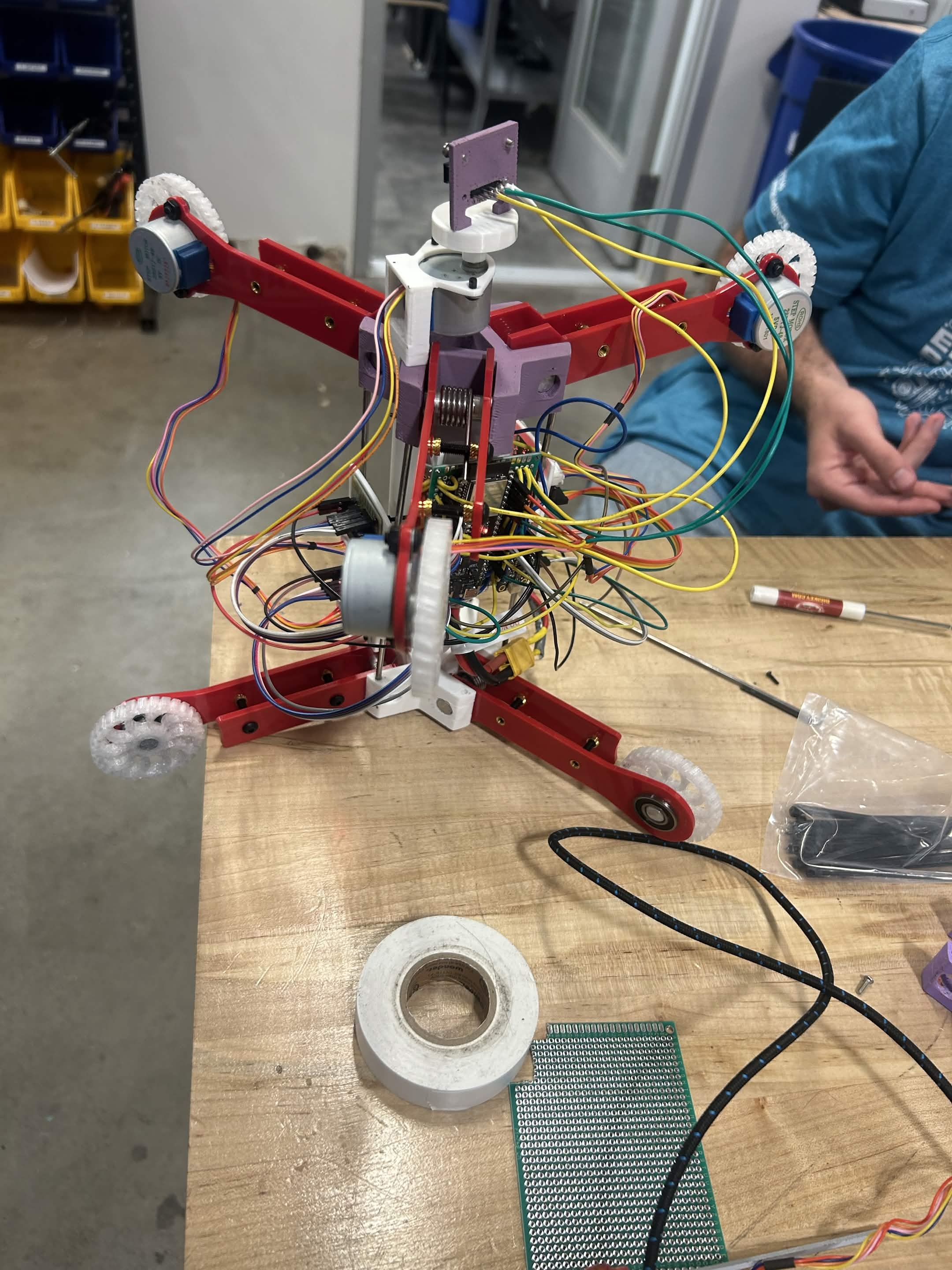
TAP with all electronics mounted


Inspiration
Many of the pipes installed in America during the 20th century have finally reached the end of their service life. Full of cracks and other damages, they are susceptible to leaks and potential catastrophic failures. Unfortunately, inspecting the miles and miles of pipes for these issues is difficult and costly, inspiring us to build TAP: the Transversing All Pipes robot, an autonomous robot capable of transversing any and all pipes!
What it does
With six spring-loaded legs, a wire frame, and a rotating camera attached to the front, TAP can move itself down any pipe while scanning the walls for cracks, rust, and other damages. It reports the data back to home base, allowing one to see exactly which sections of a pipe require replacing or repair, saving time, money, and manpower.
How we built it
TAP is built primarily out of materials found in the UCLA Engineering Makerspace. It has a wire frame connected by 3D printed components, and its spring-loaded legs consist of torsional springs and laser-cut acrylic. At the end of each leg is a custom, flexible wheel, also 3D printed from TPU filament. For the electronics, we created a custom perf board to house all the wiring for our motors and sensors, which is mounted in the center of our robot. The bot runs off of a rechargeable lithium battery pack, also mounted in the center of the bot.
Challenges we ran into
An initial issue we ran into were finding motors strong enough to move the robot up and down the pipe. We initially were able to scavenge some fan motors from a local e-waste dump, but these were unfortunately too weak. We switched to larger stepper motors as a result, placing one at the end of each of the three legs on one side of the bot. This side was the active, driving side, with the wheels on the other side being passive wheels attached to bearings to provide stability. Another key issue was size and how it affected our integration. The body of our robot had to be relatively small to allow it to fit into different pipes, meaning that our electronic components had to be very compact and space-efficient. This placed some limitations on design, and forced us to be very purposeful with how we mounted and attached the different electronic components.
Accomplishments that we're proud of
We are very proud of the passive, spring-loaded mechanism that we have been able to incorporate into the bot. It is a pure mechanical system, and quite simple and elegant as a result. Having a passive system like this to maintain contact and force with the wall allows us to save energy that can be dedicated to movement or damage detection, giving TAP a longer battery life between recharges. We are also proud of having custom-made our own perf-board for the electronics. Given the size of our bot, we knew that a breadboard-type situation would not be feasible and take up too much space. Soldering all our electronics on a perf-board allowed us to condense everything dramatically, making it much easier to fit all the required components into the bot.
What we learned
While learned in previous engineering projects, the idea of working in parallel for maximum efficiency was certainly reinforced through this project. We quickly subdivided into three main teams: hardware, in charge of the CAD and designing the spring-loaded legs, sensors, which focused on ensuring that the code for the sensors worked and that the data could be read, and finally, the electronics, which created the custom perf board and worked on designing the housing for all our electronic components. Working in parallel like this allowed us to get multiple parts of our projects done early on, prototyping quickly and iterating across all three sub-teams.
What's next for TAP: Traversing All Pipes
Next, we'd like to incorporate more sensors and more precise data collection methods. As of right now, the camera system is quite poor at detecting cracks; a LIDAR system would be much more efficient as well as precise. We would also like to add infrared cameras on board. This is because when a leak is present, there is a notable temperature difference between the crack and the rest of the environment, with a constantly scanning infrared camera, leaks within the pipe would be detected and mapped as well.

Log in or sign up for Devpost to join the conversation.