-
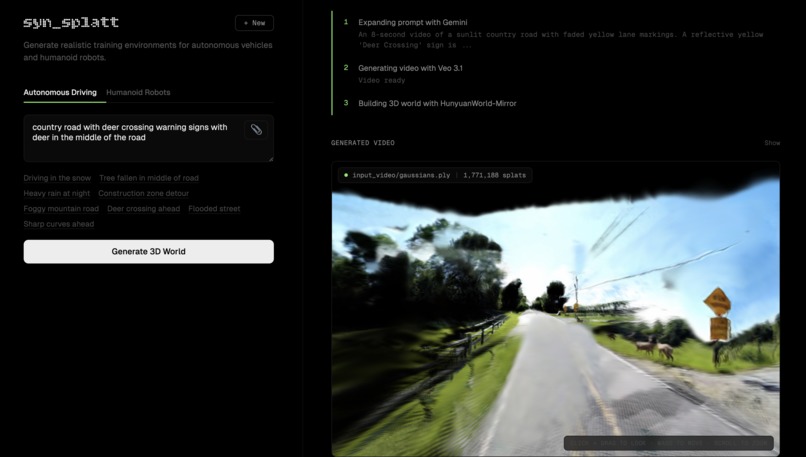
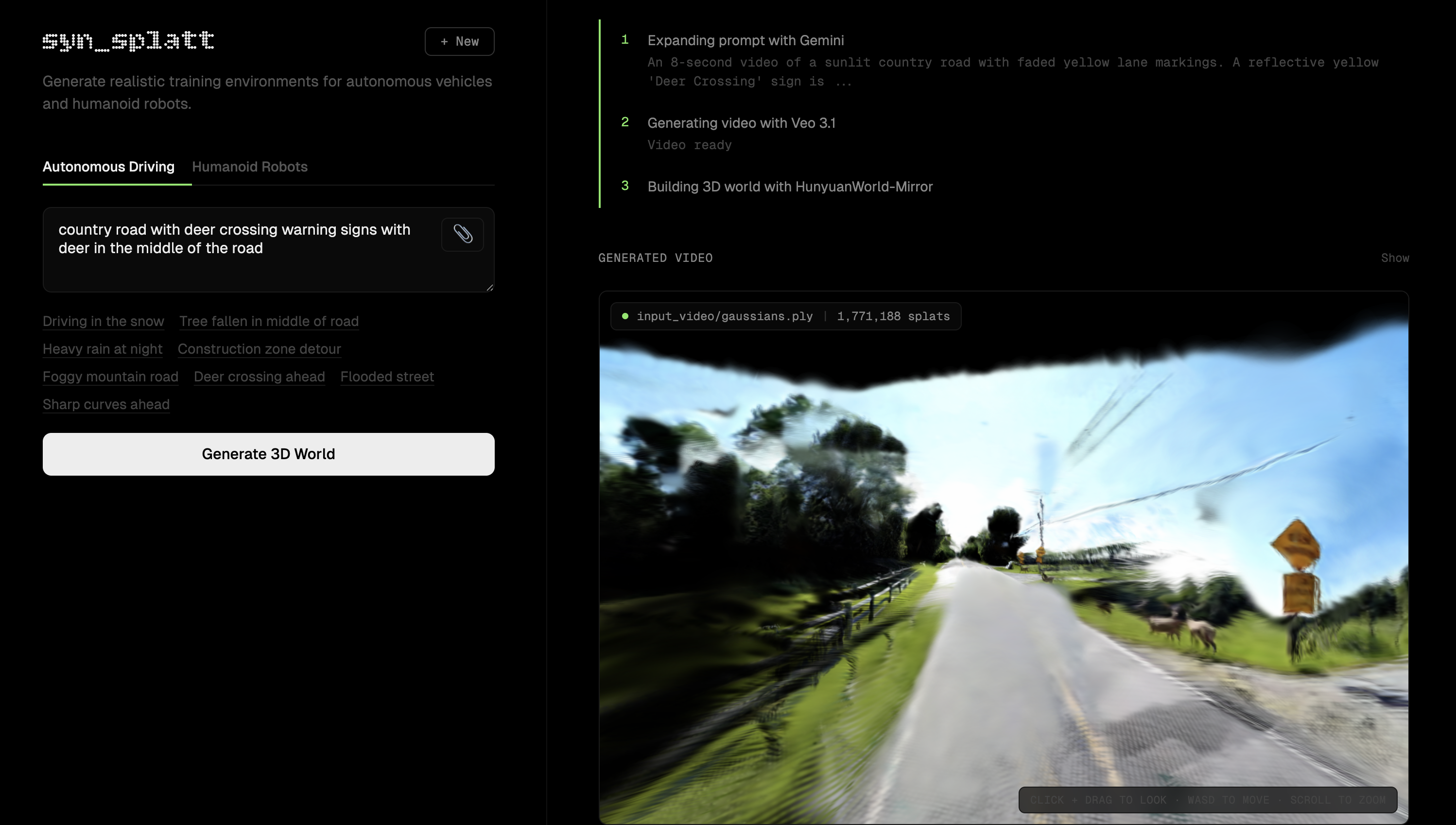
"Street with deer in the road
-

"Elephant in the road"
-
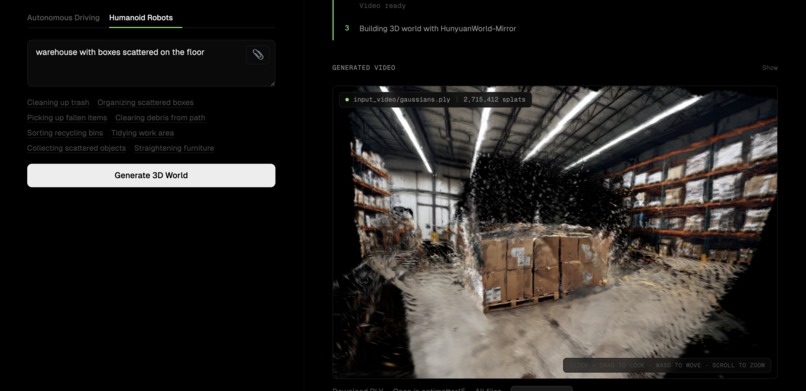
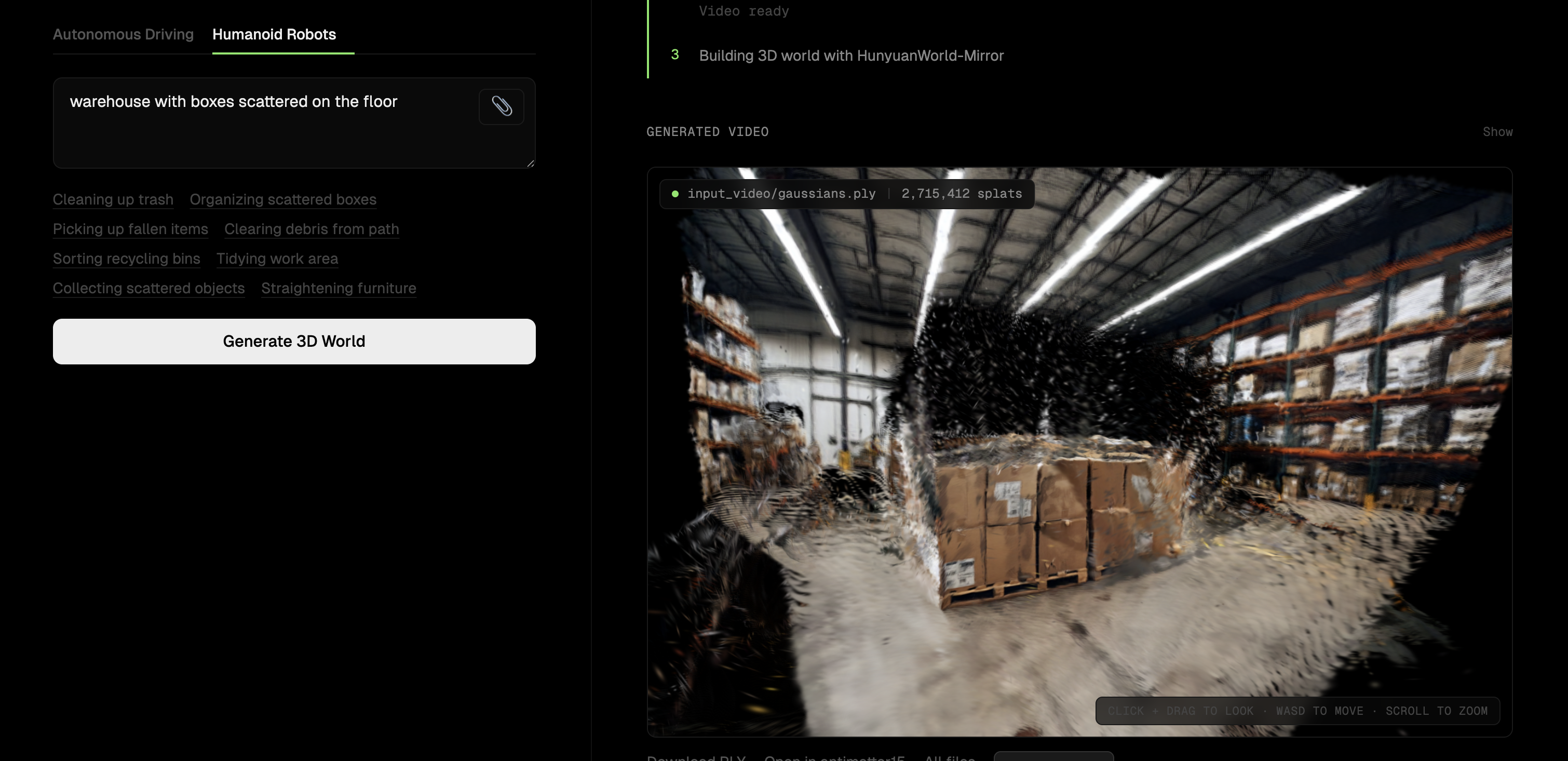
"Warehouse with boxes"
-
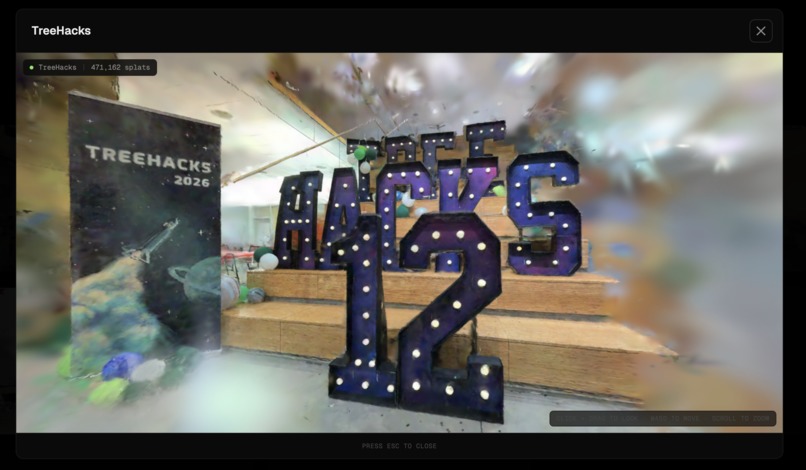
"TreeHacks venue"


Motivation
- The future of AI-like robots and self-driving cars requires lots and lots of data.
- Current datasets are extensive, but they cover common senarios, like driving in a sunny or cold day.
- They overrepresent positive cases and underrepresent edge cases and failure cases, where things could actually go wrong.
- This leads us to believe that simulations of world models will be key to simulating edge cases, like driving when a tree hits the ground, to train more robust and safe models.
- Conviction is furthered by Waymo beginning similar research, seen here
What did we do?
- Users will create prompts, such as "Generate a road that had a tree break and fall down on", a unique scenario that would be unlikely to be present in current datasets, but very valid and important to train a model on.
- An LLM hosted on Google Cloud will expand the user prompt
- Veo3 model hosted on Google Cloud will generate a video of the simulated road
- Modal hosting multiple h100 GPUs will run an open source world model / gaussian splatting algorithm to create a 3d representation of this world
Future work (half completed at hackathon)
- Physics + simulations in 3D generated space
- Segmentation of objects in 3d representation space (enabling the moving of objects in the space, identification, and training)
Built With
- gpu
- modal
- python







Log in or sign up for Devpost to join the conversation.