Inspiration
We wanted a project where small robots could work together towards a common goal, while each accomplished it's own task. We made SWARM to turn a smart house into a smart home.
What it does
SWARM allows multiple robots to connect to the same central unit. The central unit coordinates the robots and allows them to work together by acting as the "Smart" part of the smart home - it does all of the thinking, and the individual connected devices just do what they're told.
How we built it
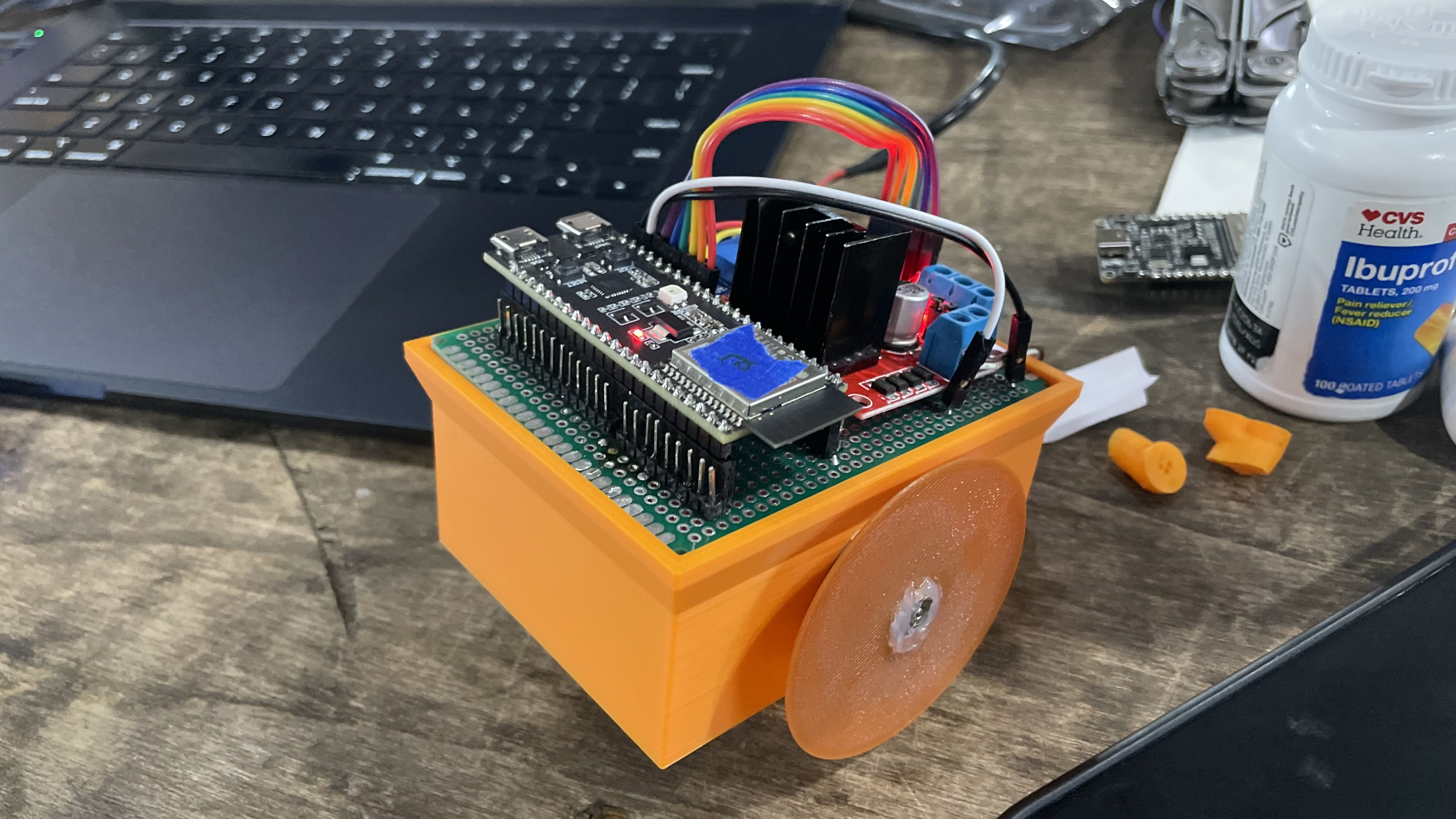
We 3d printed a robot body with two motors. It's driven by an L298N, each small robot has an ESP32-S3 that connects to the central Arduino UNO-Q via TCP over WLAN. The robots use boost converters and buck converters to power their dc motors, and are powered by a 3.7 volt lipo battery.
Challenges we ran into
Our smaller hardware components kept failing, which made it difficult to test software as we kept having to replace parts. We also had a hard time interfacing with some of the hardware we initially wanted to use, which made us have to pivot quickly.
Accomplishments that we're proud of
Despite early hardware challenges, we accomplished many of our goals.
What we learned
We learned about the value in choosing reliable parts - dying boost converters made testing and prototying difficult, and greatly slowed the testing process.
What's next for SWARM
More types of robots supported, more tasks completed.

Log in or sign up for Devpost to join the conversation.