Inspiration
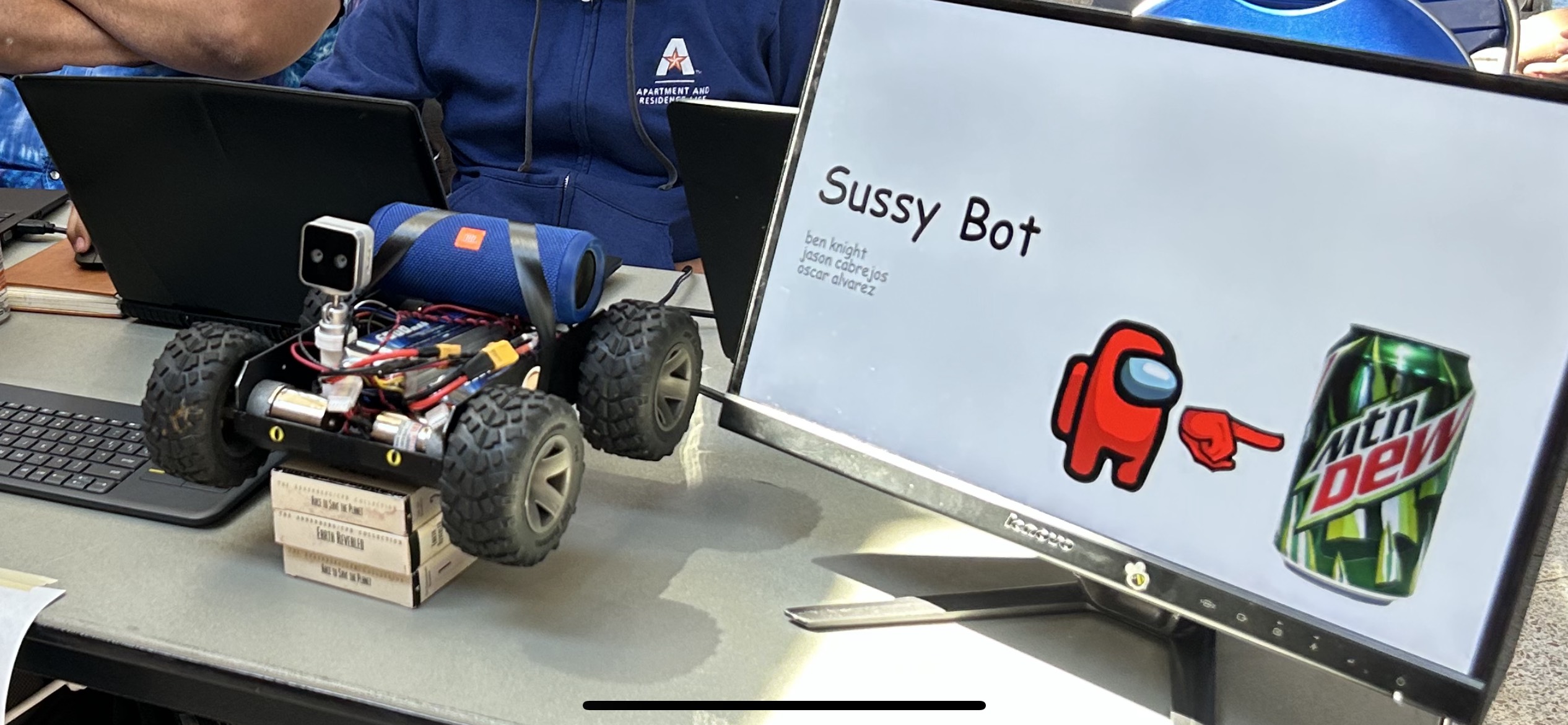
We first thought of Sussy Bot at the UTA Hackathon where someone came as an suspicious Among Us character and we knew that we had to build something revolving around that. We are all lovers of robots and didn't want your typical web app so we made the bot!
What it does
The bot is intended to:
- Follow a predetermined path
- Continually search for soda cans on said path using object detection of our own ML model made with tensorflow
- When a can is detected it scoops it up and lets everyone around it know that something was sus. ## How we built it We built it using a raspberry pi 4 for the main controls and planned to stream data through a network for offloaded object detection. ## Challenges we ran into Working with hardware in 48 hours is very hard and so is building a ML model with 0 tensorflow experience ## Accomplishments that we're proud of We got a work version of a robot that can be driven around, play sounds to alert others, and a working ML model to detect aluminum cans. ## What we learned Tensorflow is an extremely powerful tool for pattern recognition and can be done in a few days time. ## What's next for Sussy Bot Actually mapping detection to robotic controls.
Built With
- linux
- machine-learning
- neural-networks
- object-detection
- opencv
- python
- raspberry-pi
- tensorflow


Log in or sign up for Devpost to join the conversation.