Inspiration
The inspiration behind this project comes form the Winter Olympics, where success depends on speed, precision, and control under pressure. We wanted to build a robot that mirrors those qualities by moving with purpose, reacting quickly, and completing tasks cleanly without wasted motion. With limited time and a fixed hardware kit, out focus stays on efficient design, reliable movement, and consistent performance.
What it does
The robot navigates a structured course by following designated paths, detecting and interacting with objects, and completing required tasks in sequence. It uses sensor input to guide movement, adjust direction, and respond to obstacles in real time. The design focuses on smooth motion, controlled actions and consistent performance from start to finish.
How we built it
We kicked off the robot design project by defining every mission up front. Each mission drove clear hardware choices. Parts, sensors, and motors followed function, not guesswork.
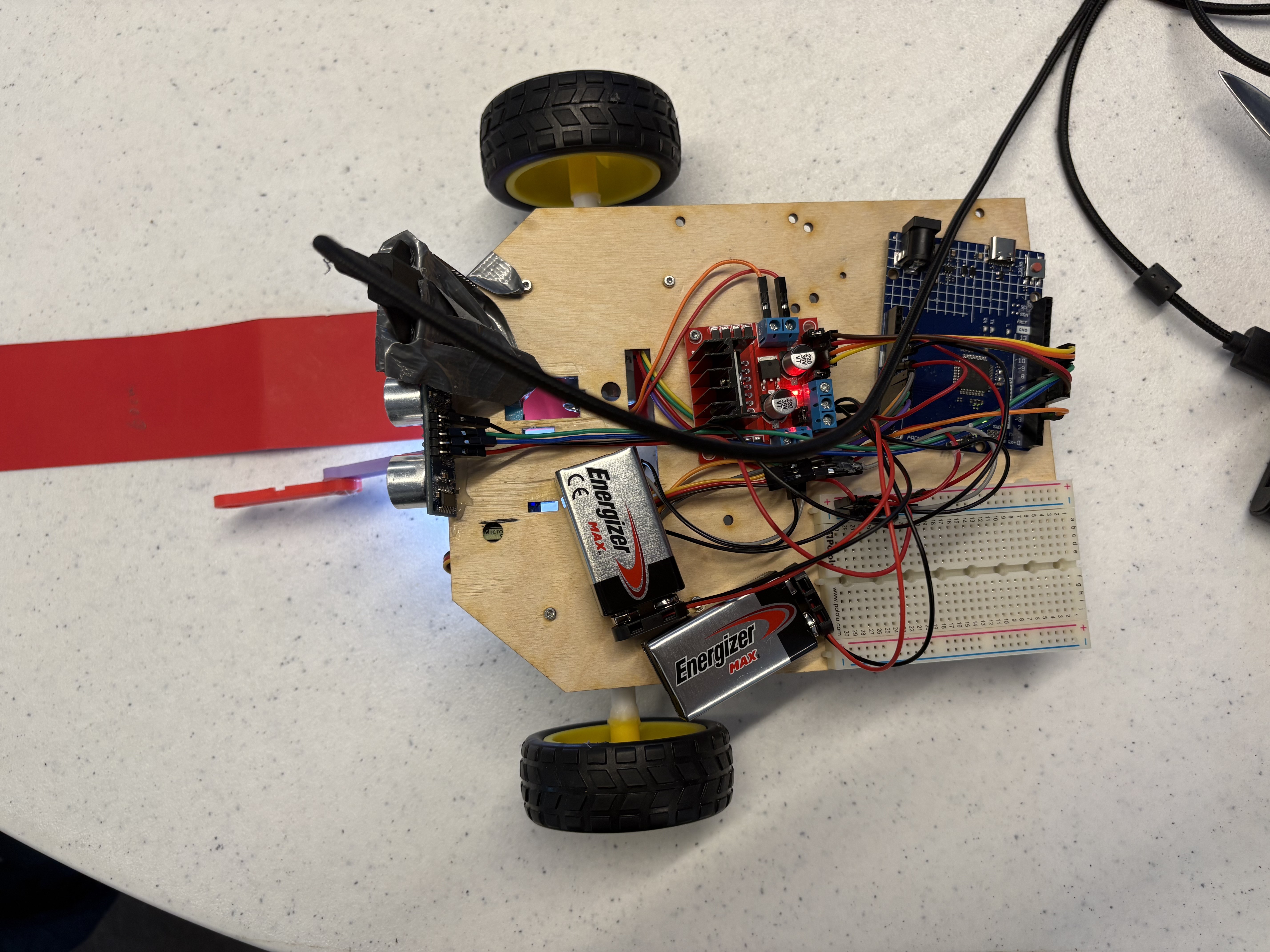
For the target mission, the system centers on ball placement inside a circular zone. Required components include two DC motors, one servo motor, and a color sensor. The color sensor reads surface color to confirm position inside the circle. The DC motors drive forward to push the ball, then reverse to reset position. Motor encoders provide distance and motion accuracy. The servo controls an articulated arm that extends and retracts to interact with the ball with precision.
The red mission expands both sensing and interaction. The robot uses two DC motors, a servo motor, a color sensor, and an ultrasonic sensor. The motors drive the robot along a defined path while supporting line following. The color sensor reads surface intensity to maintain alignment in real time. The ultrasonic sensor measures distance to nearby objects, supporting obstacle avoidance and path decisions. The servo actuates a gripper to collect a block, which triggers the unlock condition for the mission.
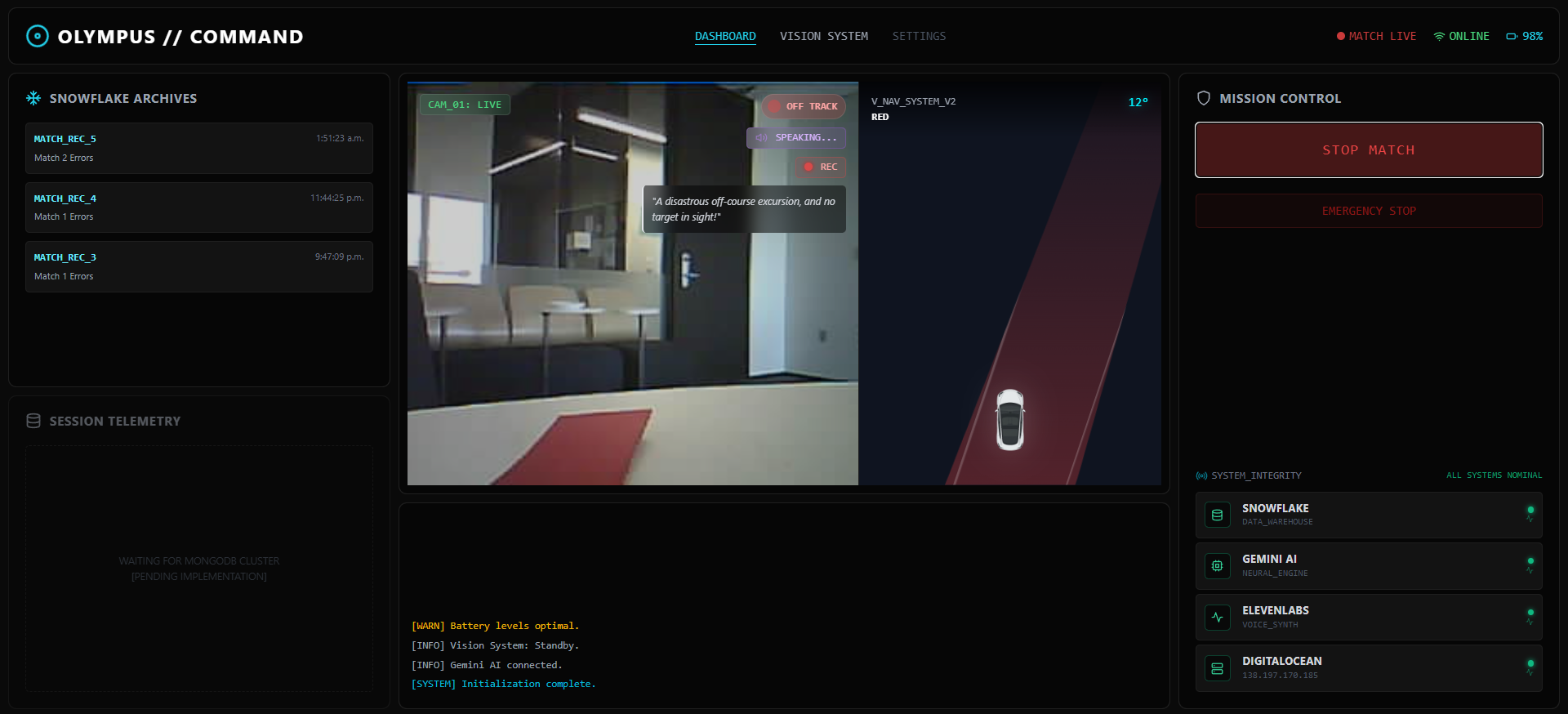
Software ties the system together as a single intelligent agent. Core logic and operator control run through a Python dashboard built with Streamlit and OpenCV. The interface functions as a live heads up display. Telemetry, sensor states, and camera feeds update in real time, giving full visibility into decision making during navigation.
Autonomy runs through multimodal vision. Camera frames are sent to Gemini every 15 seconds for path verification and drift detection. Text analysis from Gemini feeds directly into ElevenLabs. The result is live AI sports commentary that narrates robot behavior during each run.
Data handling supports iteration and improvement. After every run, video footage is archived in Snowflake as a long term system of record. This dataset supports retrieval augmented strategy analysis across past runs. Training jobs execute on CPU optimized DigitalOcean Droplets. Scripts process archived video to refine navigation behavior. Jobs trigger once per day to mirror production scale machine learning workflows. This batch pipeline balances realism, efficiency, and repeatability while reinforcing continuous improvement across heats.
Challenges we ran into
We encountered several engineering constraints that pushed us to iterate fast and prioritize reliability. Multiple 3D printed components from the provided kit proved fragile and failed under repeated testing, which forced rapid redesigns and reinforced mounting strategies. In addition, some parts did not fit their intended interfaces due to modeling inaccuracies and print tolerance issues, so we adapted the assembly through structural reinforcement, mount rework, and alternative fastening solutions to preserve mechanical integrity.
A major challenge was achieving functional duality with limited hardware. We needed a single servo-driven mechanism that could both lift the box and strike the ball, without compromising balance, stability or clearance during motion. This required careful placement, tight packaging, and continuous validation to prevent binding, collisions, and unintended load on the drivetrain.
On the software side, we aimed for a fully autonomous run without repeated tethering and re-flashing by implementing a state machine capable of progressing through each stage of the course. Designing transitions that remained robust under real-world variability was more complex than anticipated, but we delivered a dependable implementation that executed the sequence effectively and maintained consistent behaviours across repeated trials.
Accomplishments that we're proud of
We built a fully functional robot from a fixed hardware kit within a tight time limit. We achieved smooth, controlled motion across the course and reliable interaction with objects using consistent logic and sensor input. The system performed repeatably during testing, showing strong coordination between hardware and software. Most importantly, we worked efficiently as a team, made fast decisions, and delivered a complete solution under pressure.
What we learned
We learned how to turn a vague challenge into a working plan, then build around clear priorities like reliable movement and repeatable object interaction. We learned how small mechanical changes affect performance, and how fast testing beats overbuilding. We learned how to use sensor feedback to drive decisions, tune timing for smoother control, and debug both hardware and code under time pressure. Most of all, we learned how to split roles, communicate quickly, and iterate as one team.
What's next for Group 77 - UTRA's Most Wanted
Next, the focus is in improving navigation accuracy for tighter turns and smoother path following while refining object interaction for faster and more reliable actions. The team will optimize code timing to improve responsiveness and reduce delays, then stress test the robot under varied conditions to improve consistency. Final iterations will streamline the design to reduce weight and simplify maintenance while preserving performance.

Log in or sign up for Devpost to join the conversation.