-

iso
-
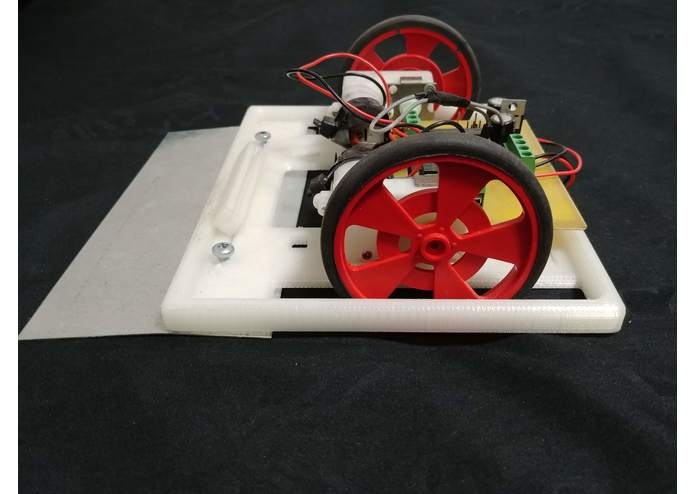
side
-

board
-

front
-

back
-

bottom
-

-

-










Purpose
To detect and push opponent bots out of arena successfully. Built alongside talented partner.
How I built it
Built from scratch using 3D printed parts and custom PCBs, Programmed in PIC BASIC Pro. Kept design low profile and highly modular, by utilizing a friction fit board holding design and jumper wires to connect separated motherboard, motor and sensor PCB's.
Challenges I ran into
Due to the highly modular nature of the project, there ended up being some connection issues due to the lack of friction in jumper wire connections.
Accomplishments that I'm proud of
Ended up with a semi-functional sumo bot at the end of the course.
What's next for Sumo Bot
It will be a nice shelf showpiece.
Built With
- 3d-printing
- basic
- circuit-design
- pic-microcontroller
- soldering

Log in or sign up for Devpost to join the conversation.