-
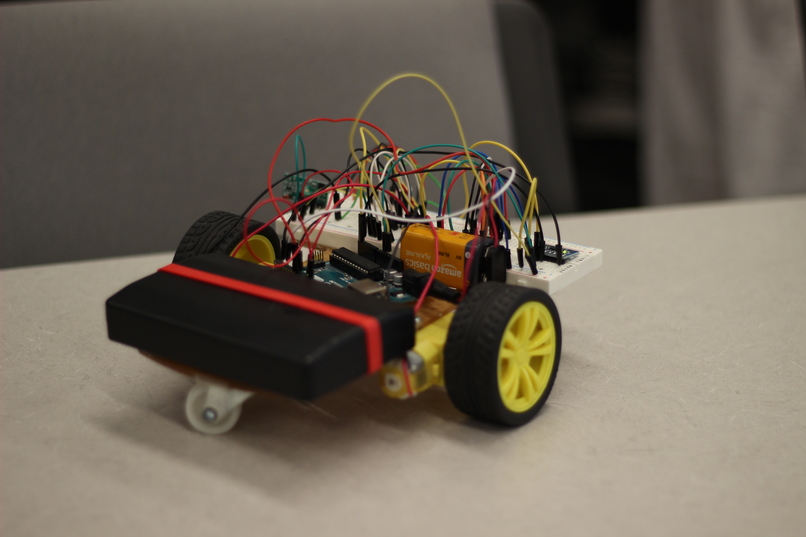
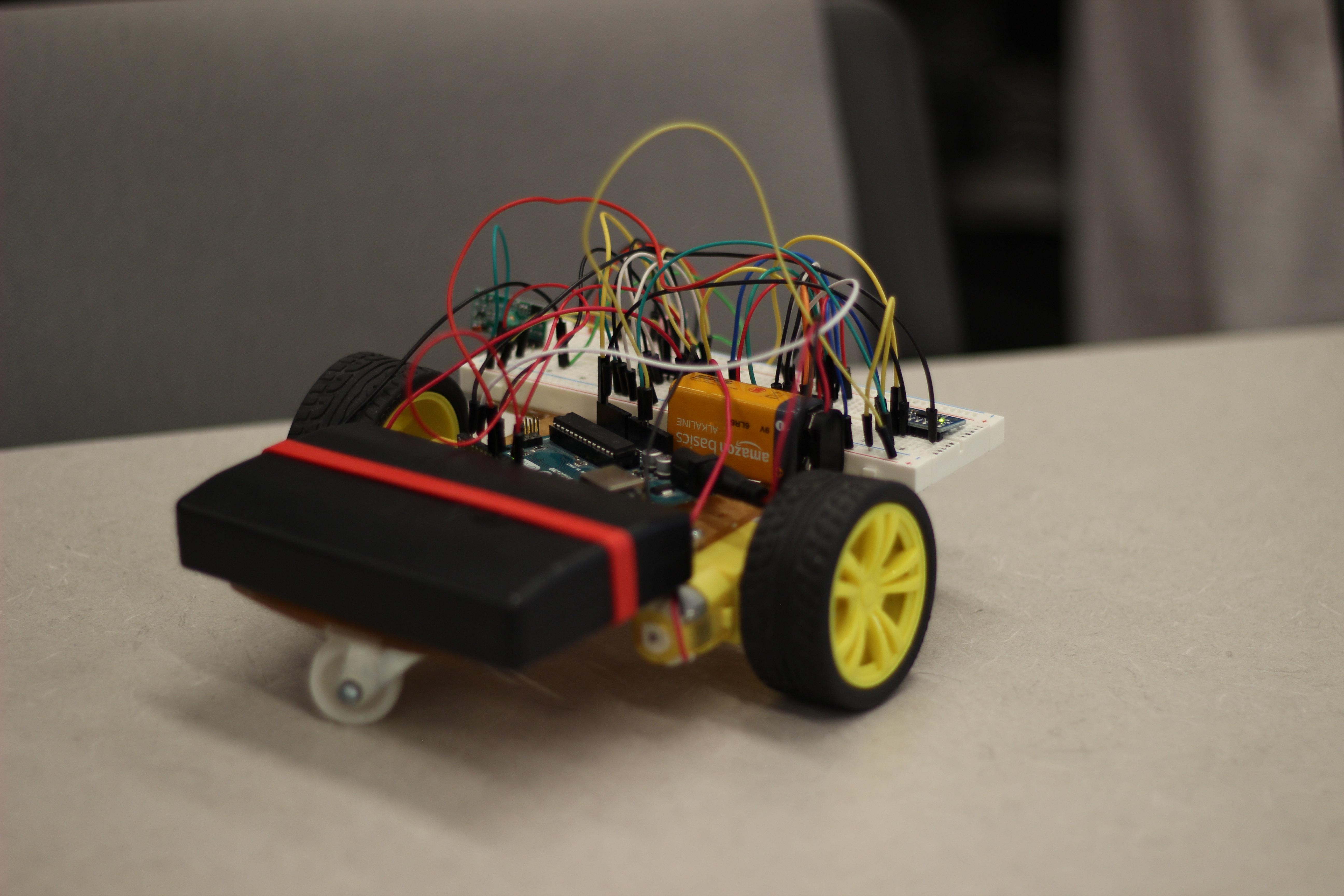
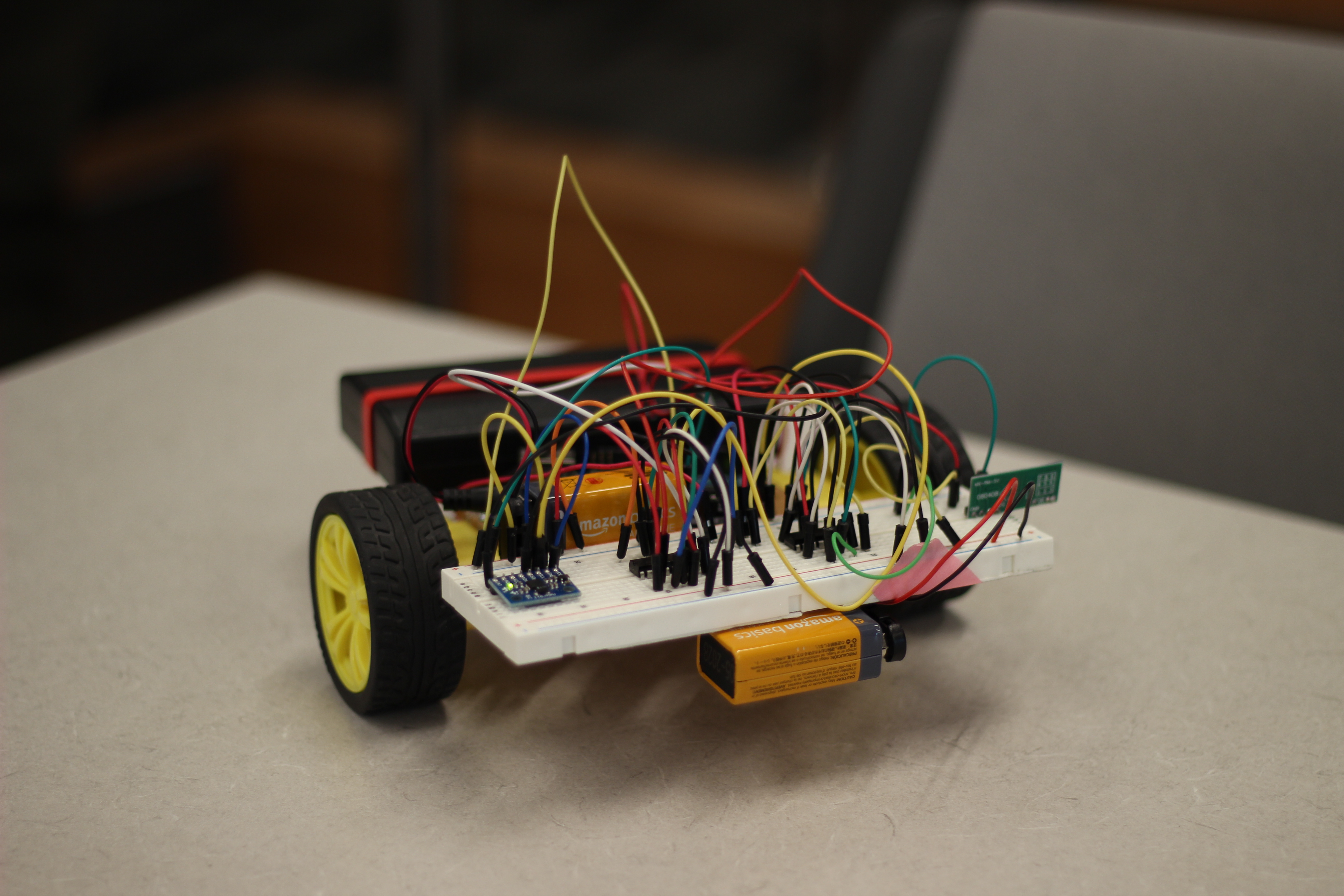
Inventory robot
-
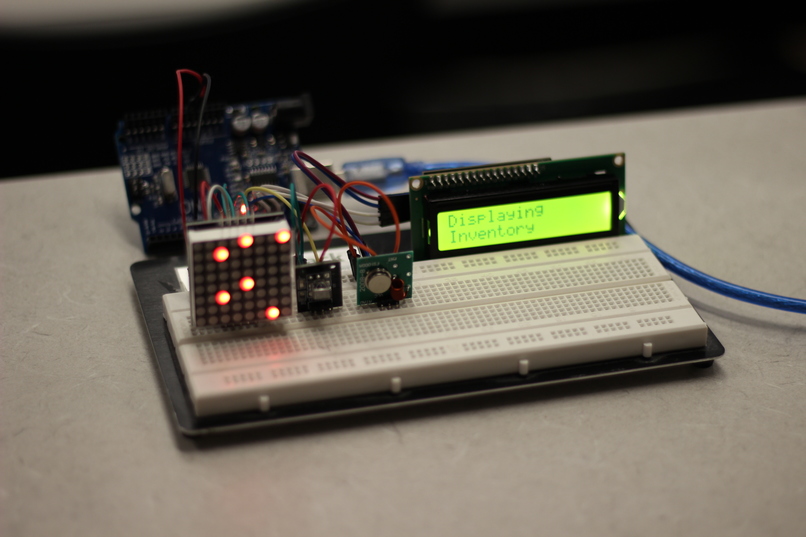
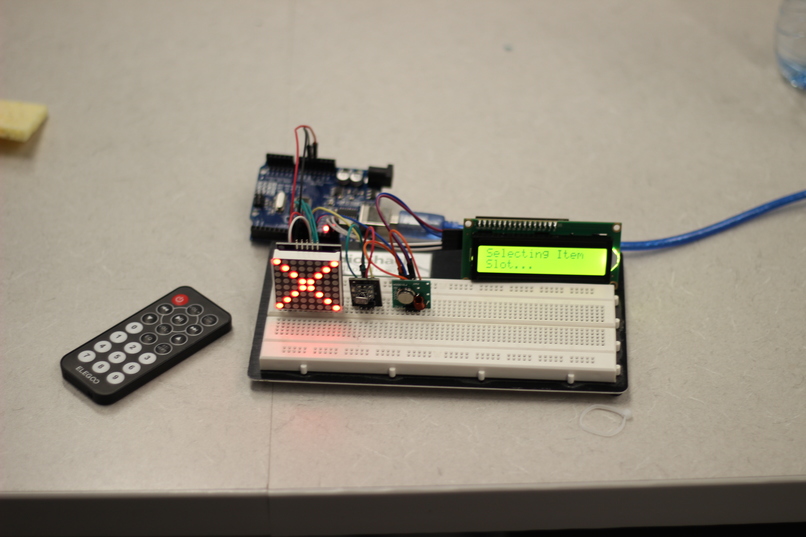
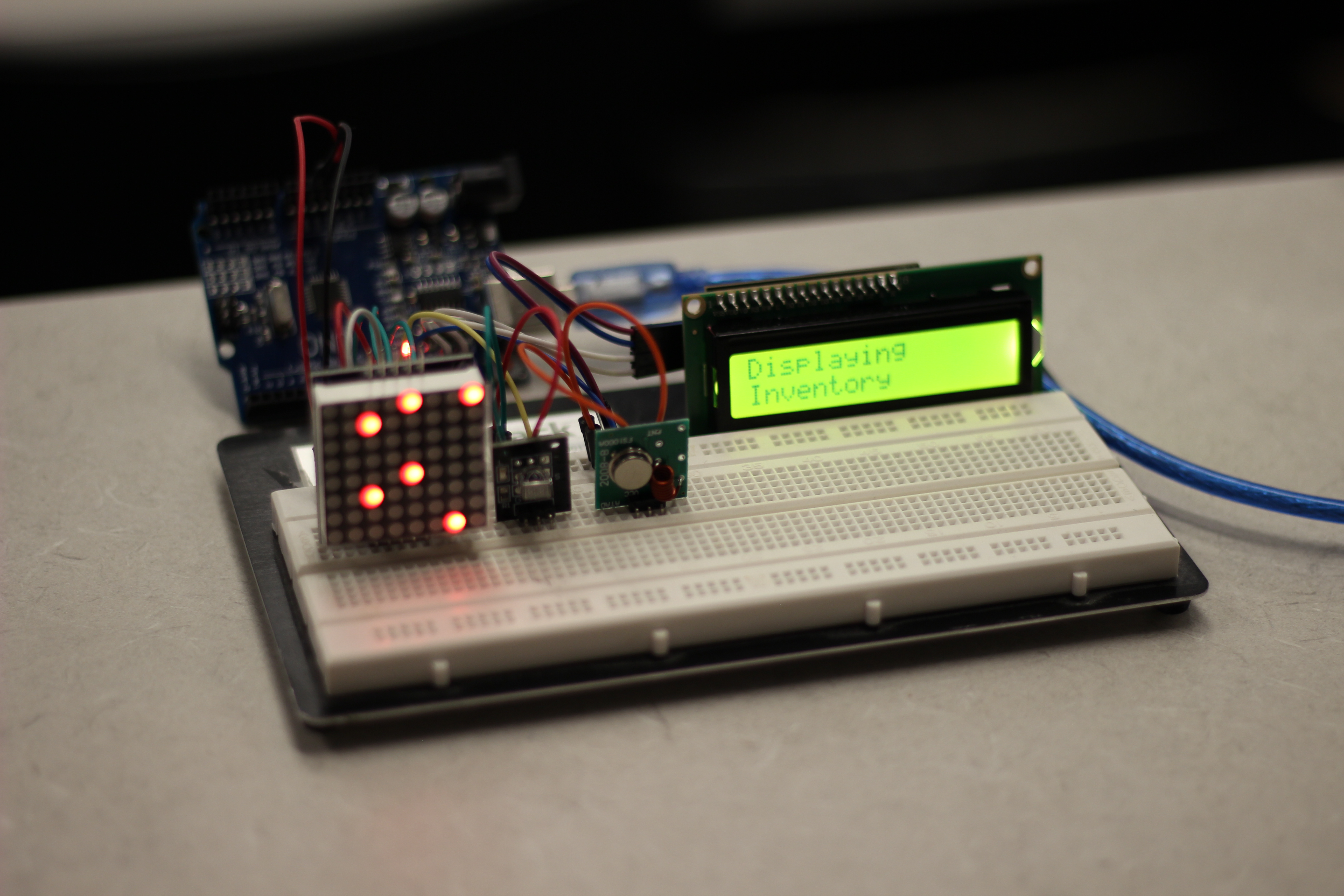
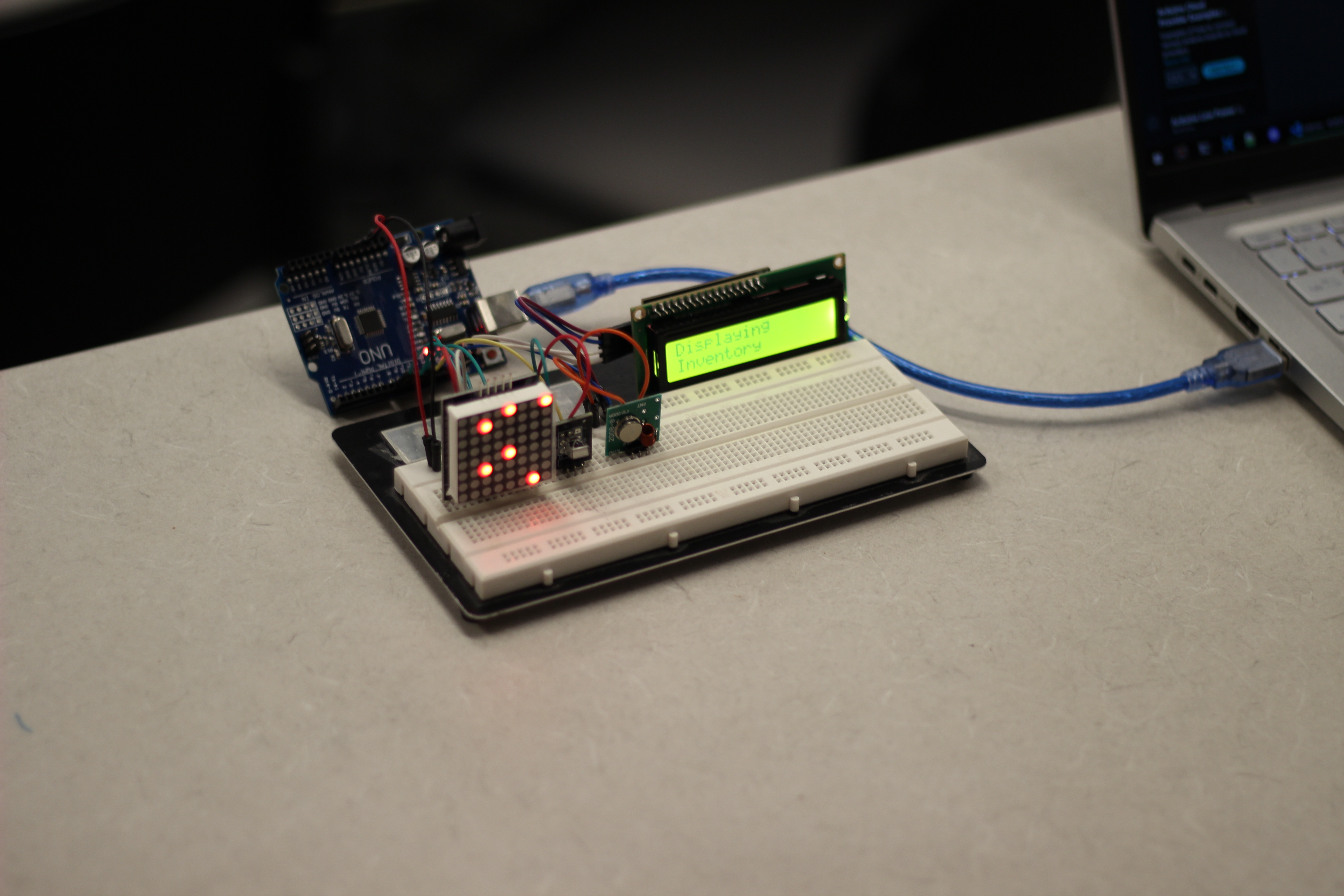
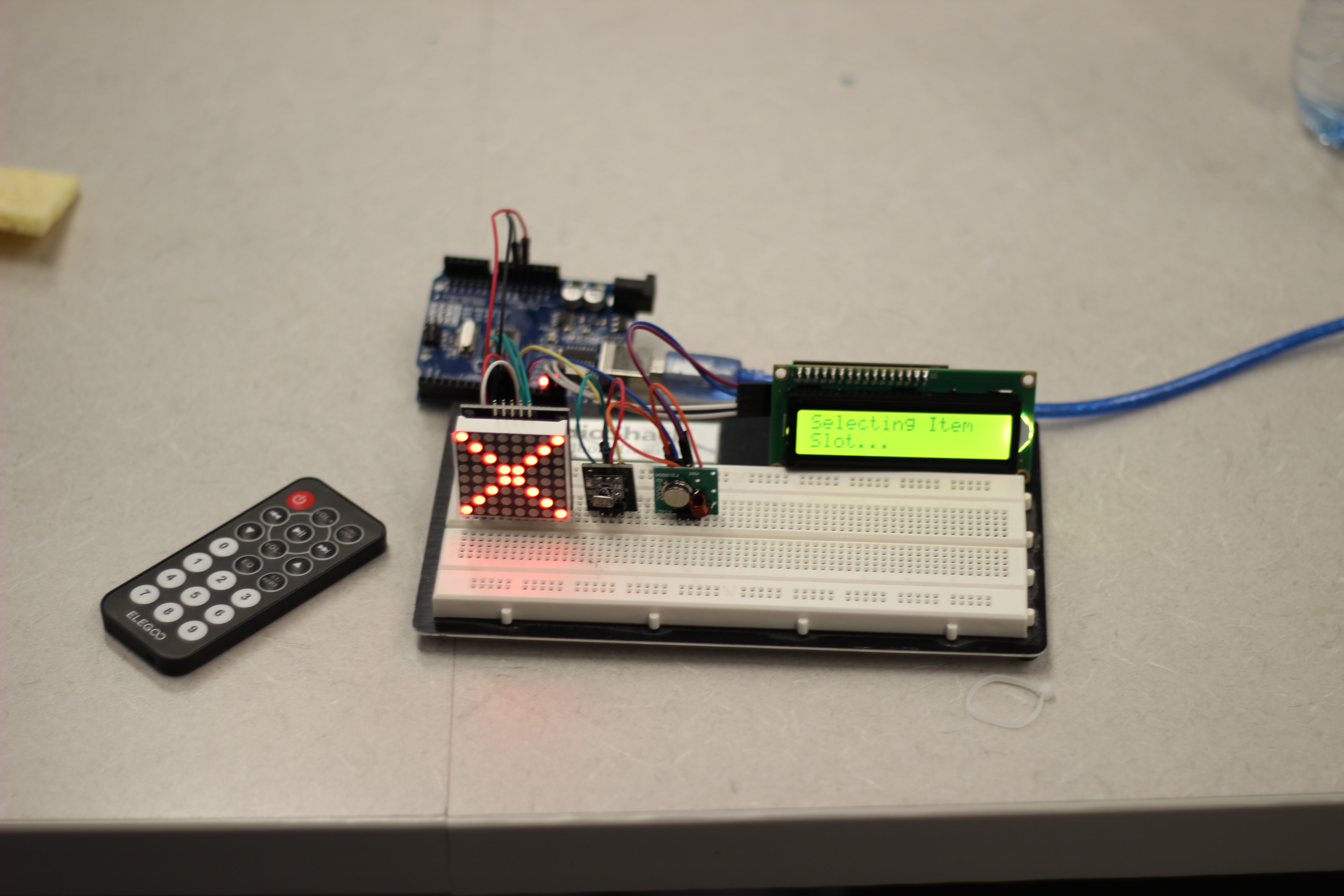
Inventory terminal
-
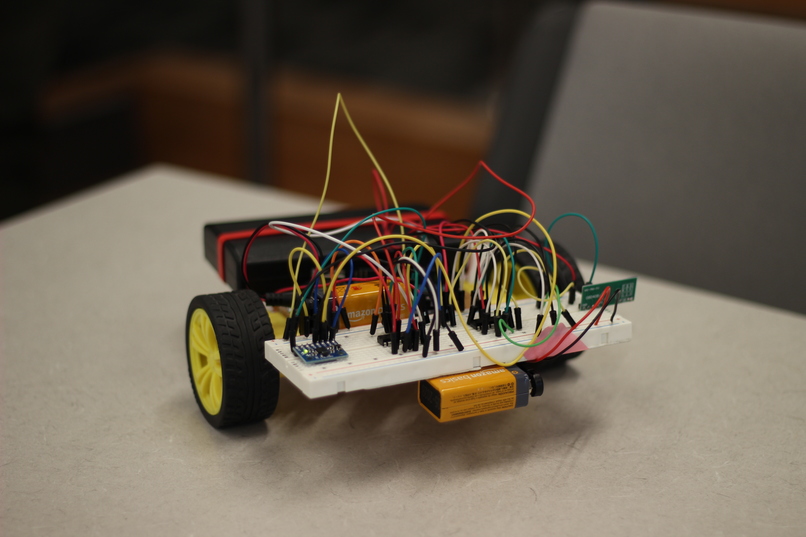
Inventory robot
-
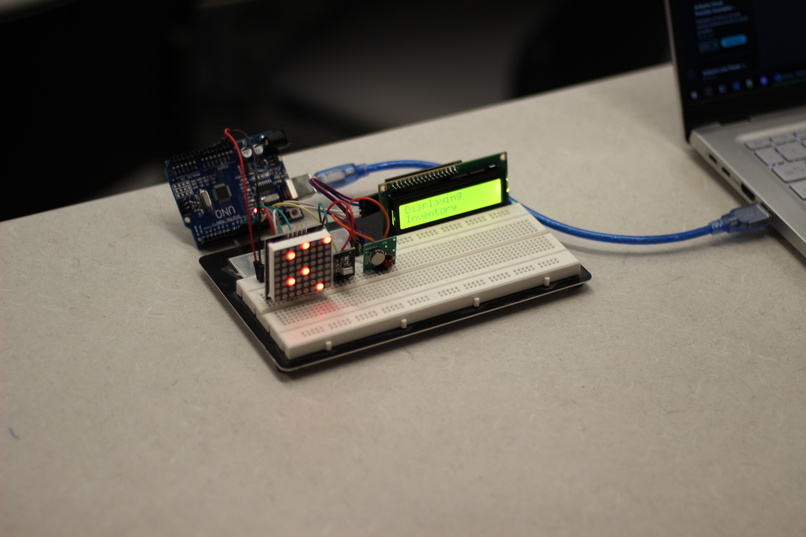
Inventory terminal
-
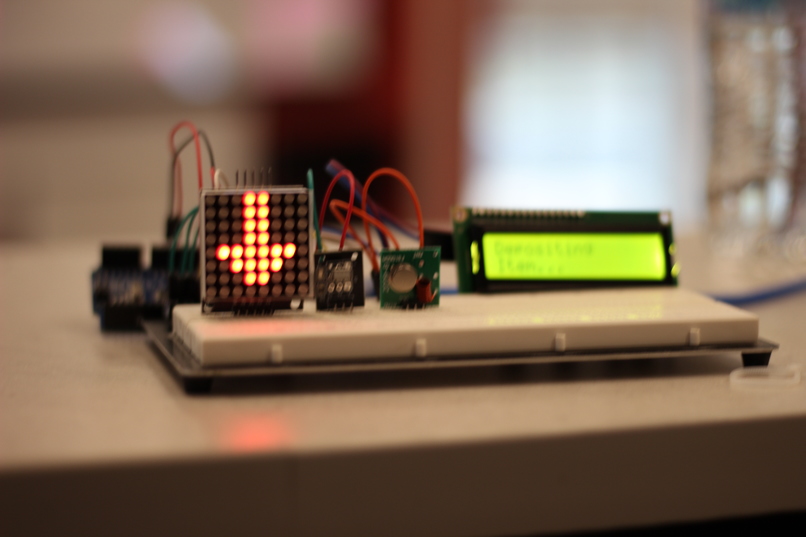
Deposit in progress
-
Trying to deposit to a full cell
Inspiration
The modern submarines of today can stay underwater for a very long time. With their nuclear reactors and advanced reverse osmosis systems, they can operate without surfacing for weeks, if not months. While they can have seemingly infinite power and even water, the limiting factor lies with the limited storage for food and other amenities.
What it does
Subspace aims to tackle this by providing a compact and robust way to store and organize inventory. With our advanced controller, a user can intuitively see where resources are stored, as well as how much storage is available. Then, with a few clicks of a button, the user can command our fully automated storage bot to store an item. Retrieval is just as easy.
How we built it
We built Subspace using Arduino controllers and various peripherals. The Subspace terminal, which is used to control the storage system, uses an LED dot matrix display, a text display, an IR receiver and remote control, and a radio transmitter. The storage robot utilizes the GY-521 6 DOF gyroscope and accelerometer to gather precise positional data. We also used the L293D to get bidirectional operation out of the DC motors used for the storage robot.
Challenges we ran into
Initially we intended on using a simple NPN BJT to drive the DC motors to keep the cost down and complexity down on the build, but this implementation only allowed for forward traversal. In order to get bidirectional movement we switched to using L293D H-bridge IC. This driver chip let us reverse the polarity of the DC motor remotely allowing it to go backwards along with forwards.
Accomplishments that we're proud of
While developing the Subspace storage terminal, we initially used a significant amount of memory which would lead to problems later down the line. We were successfully able to reduce the dynamic memory usage of the entire program, which let us continue the project without running into any further issues.
What we learned
We learned how to interface with various peripherals through the Arduino system, such as an LED dot matrix display and an infrared receiver. We also learned how to communicate between Arduino board using radio transmitters and receivers.
What's next for Subspace
While Subspace can easily manage inventory and transport objects to their designated storage locations, it does not support using existing storage structures, such as a shelf. Another shortcoming is that it cannot load or offload inventory without external assistance. The next step for Subspace would be addressing these shortcomings by integrating it with its own storage system and adding an apparatus to transfer items to and from the storage system.



Log in or sign up for Devpost to join the conversation.