Sub-Zero
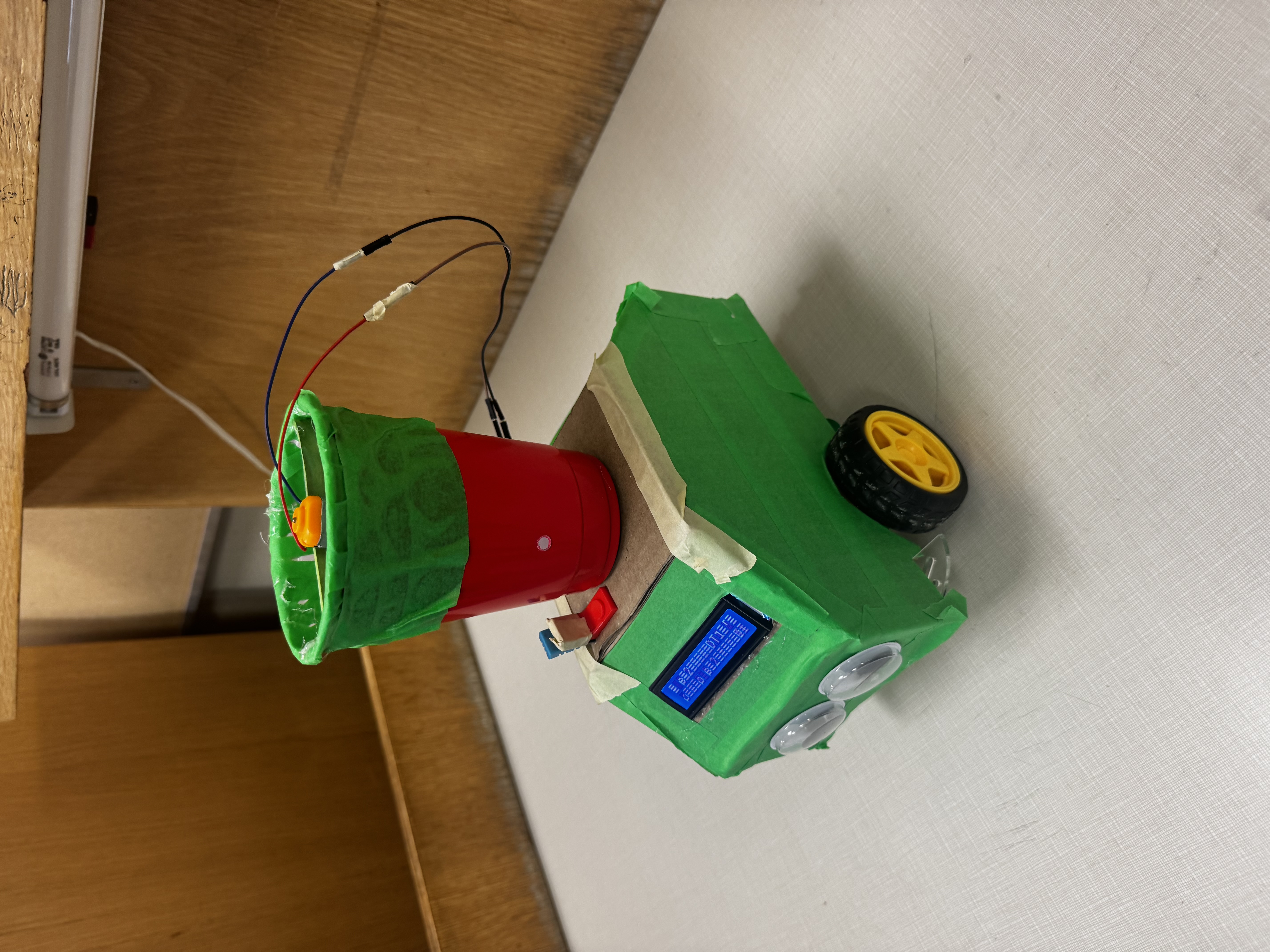
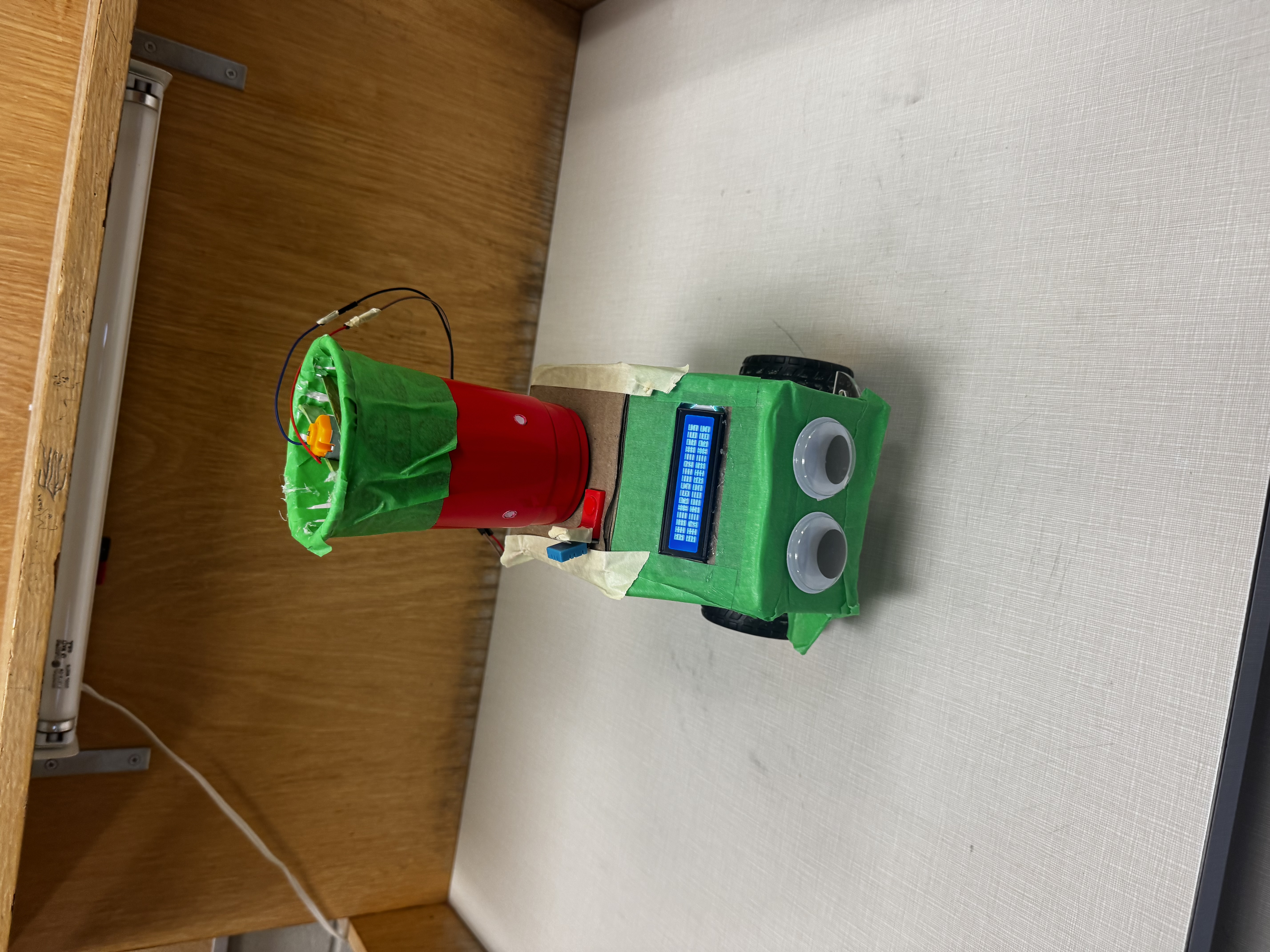
The project is a user controlled robot via a joystick the robot continuously detects the temperature in the room and cools the air independently in hot environments

Updates

Leave feedback in the comments!
The project is a user controlled robot via a joystick the robot continuously detects the temperature in the room and cools the air independently in hot environments

Leave feedback in the comments!
Log in or sign up for Devpost to join the conversation.