-
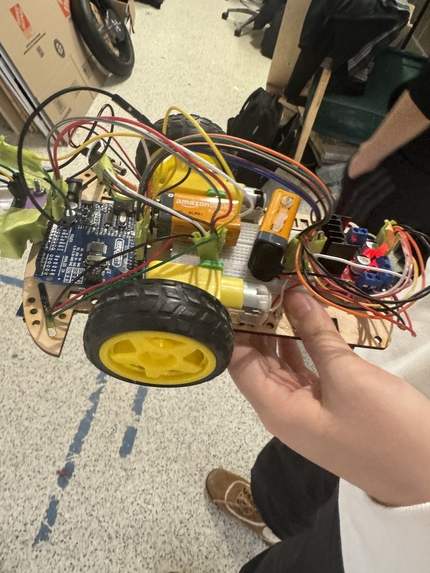
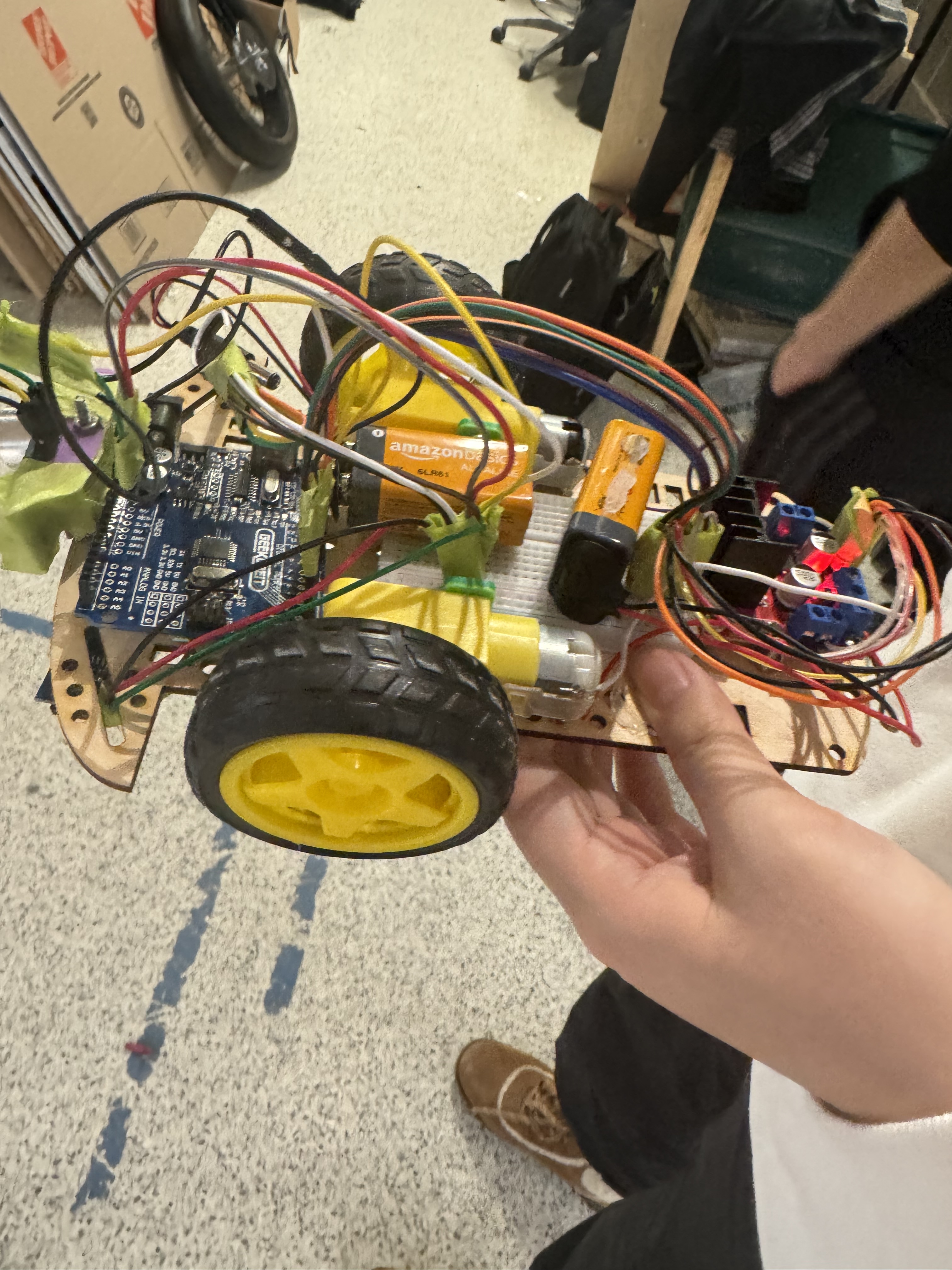
The final look of the robot with all the parts connected.
Inspiration
Knowing that it might be difficult for some disabled people to move and do things in locations far apart, we wanted to design a robot that is able to do simple tasks for the user by travelling through a designed path. We also want to make it smart enough to find its way in walls of obstacles so that it does not get stuck in the same area.
What it does
The robot follows a planned electric track and turns away from obstacles from a distance ahead.
How we built it
We built it as a team of four using screws, nuts, sensors, motors, motor shield, batteries, an arduino board and a breadboard. The motor that moves the robot wheels is connected to the motor shield, powered by a batterie and connected to the arduino board for instructions. A distance sensor is but at the front of the cart to detect distance from obstacles ahead, and two infrared sensors are used to track the electric path, placed at the front facing down. A breadboard is then used to connect the circuits between the parts. Functions are coded in arduino to tell the robot to move differently according to different circumstances. All these were put together to form a robot.
Challenges we ran into
We realized that one motor was much weaker than the other, so we had to work on balancing the difference while having the functions working. We were also stuck on finding a way to have the robot turn.
Accomplishments that we're proud of
Despite the struggle on facing our challenge of our motor constantly breaking, we were able to complete course 4 where the robot passes through a maze to the end.
What we learned
We learned about how all parts of the robot is controlled by the arduino board, how to move and control the robot by changing the code, and we gained some debugging experience.
What's next for Strongest Paperstraws
We will work harder on the hackathon with experience gained from this time, and hopefully get more tasks done.



Log in or sign up for Devpost to join the conversation.