We required real-time image mosaicing for our UAV, but were unable to find an open-source package compatible with our ROS (robot operating system) platform.
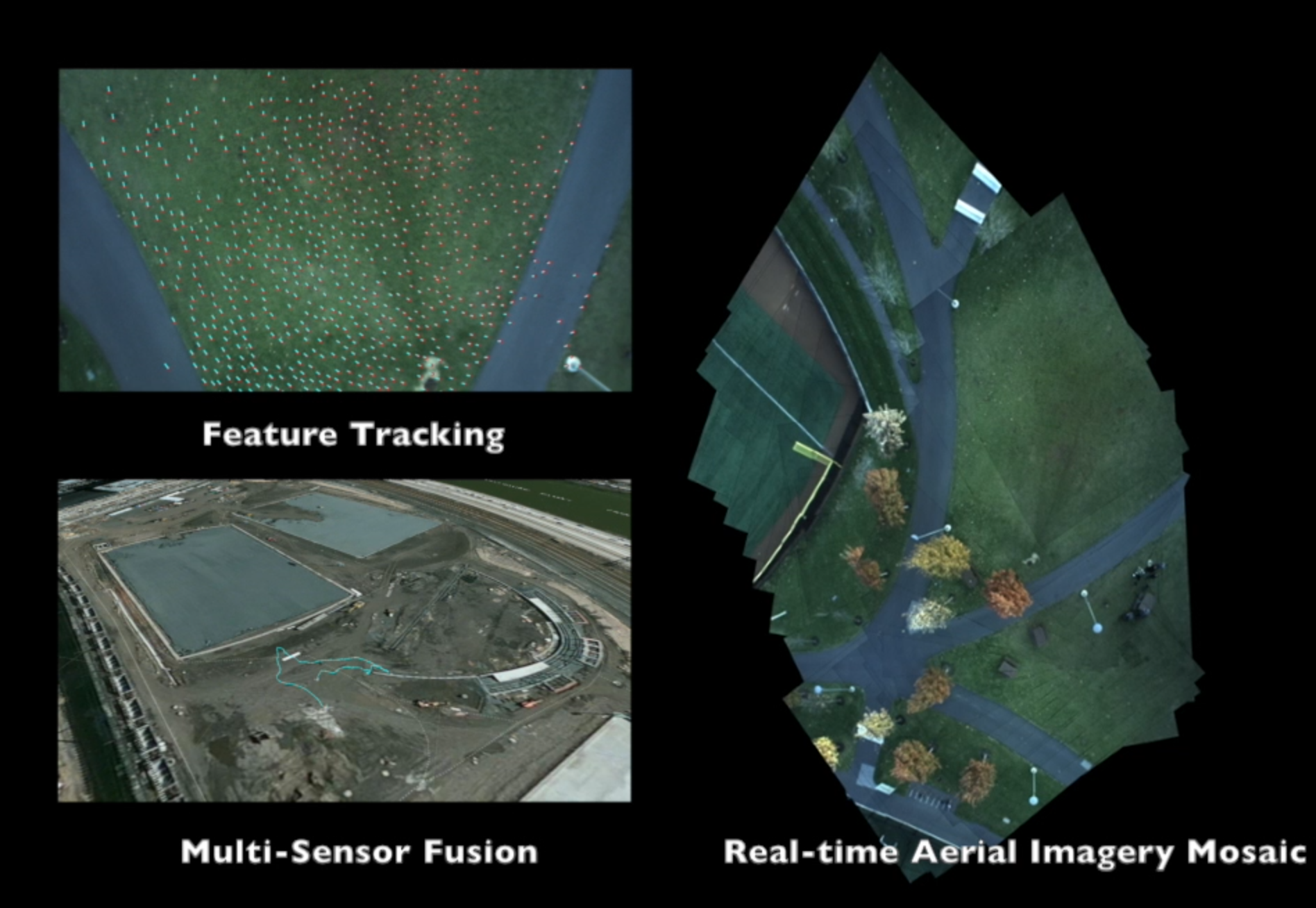
Thus we were inspired to build Stitchtron 9000, a ROS module capable of stitching aerial images in real-time. Our solution applies computer vision techniques to select and assemble images into a large aerial map.
We are excited about this system because it has numerous applications in the burgeoning drone market, particularly in the fields of precision agriculture, cadastral surveying, and time-critical mapping of disaster areas.
Note: Data collection was performed several months prior to PennApps Winter 2015 for a unrelated project. The data was repurposed for this contest.
Sensor-fusion trajectory is provided only for reference, and is not used in the image stitching. The trajectory is overlaid onto a satellite map from Mapbox. The satellite map is out of date, and depicts the park before completion.




Log in or sign up for Devpost to join the conversation.