-

The finished product!
-

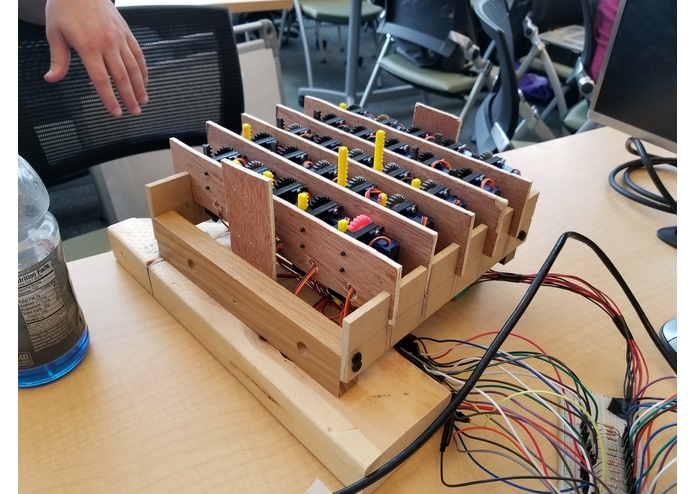
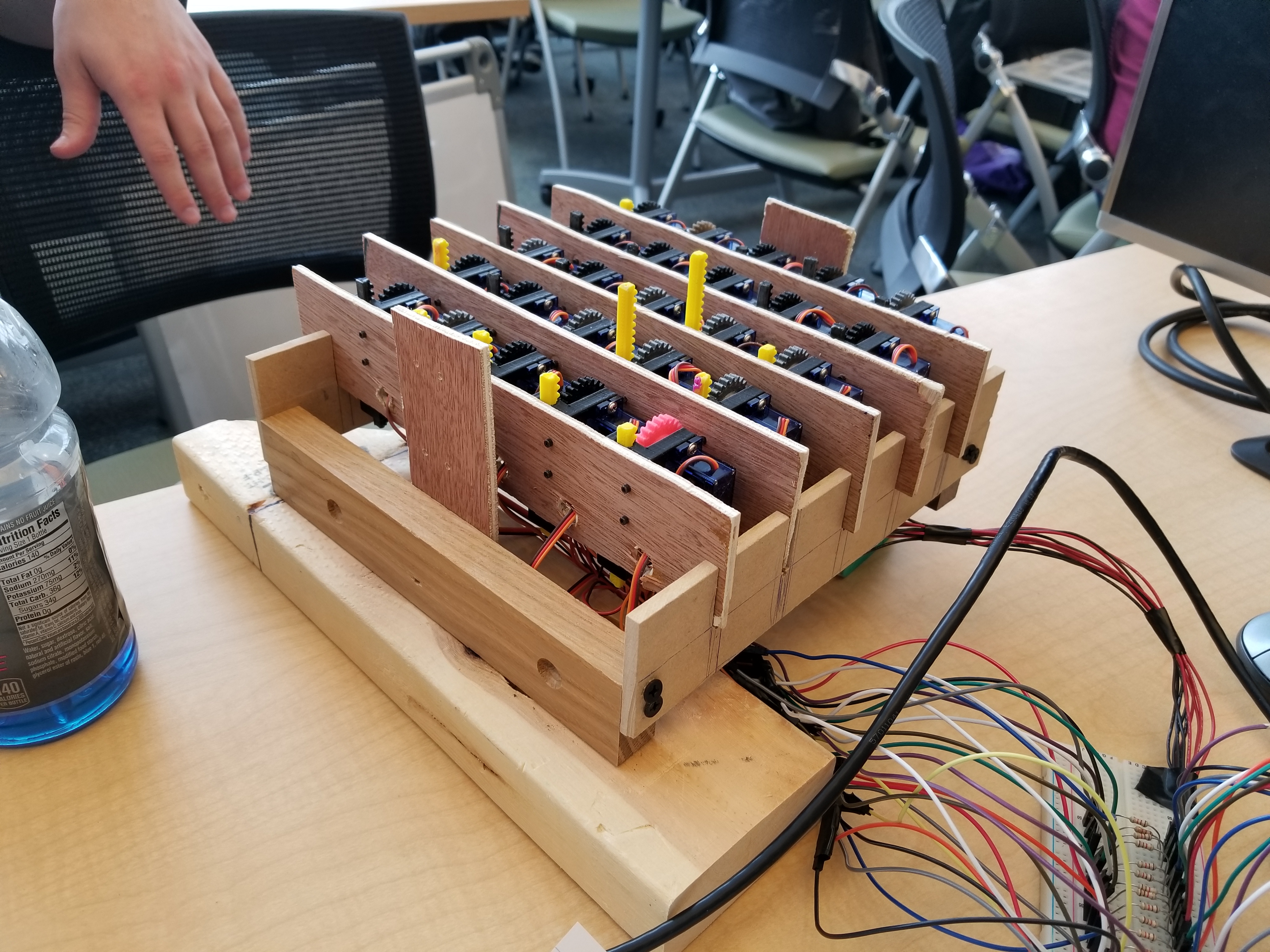
Assembling all of the linear actuator modules
-

Modifying servo horns to work with 3D printed gears
-

Wiring
-
Wiring
-
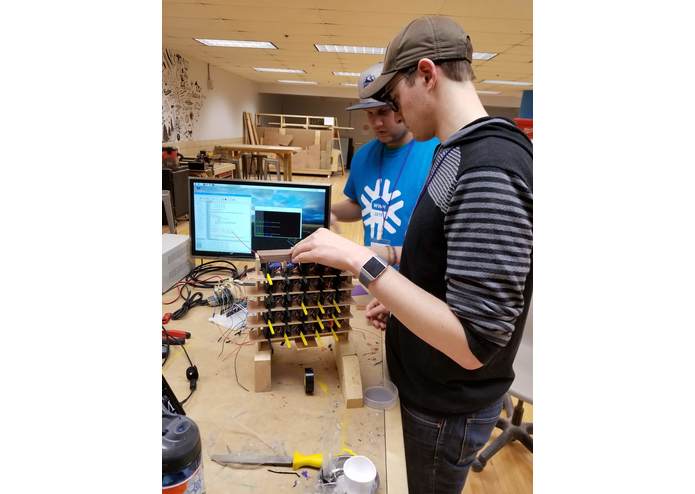
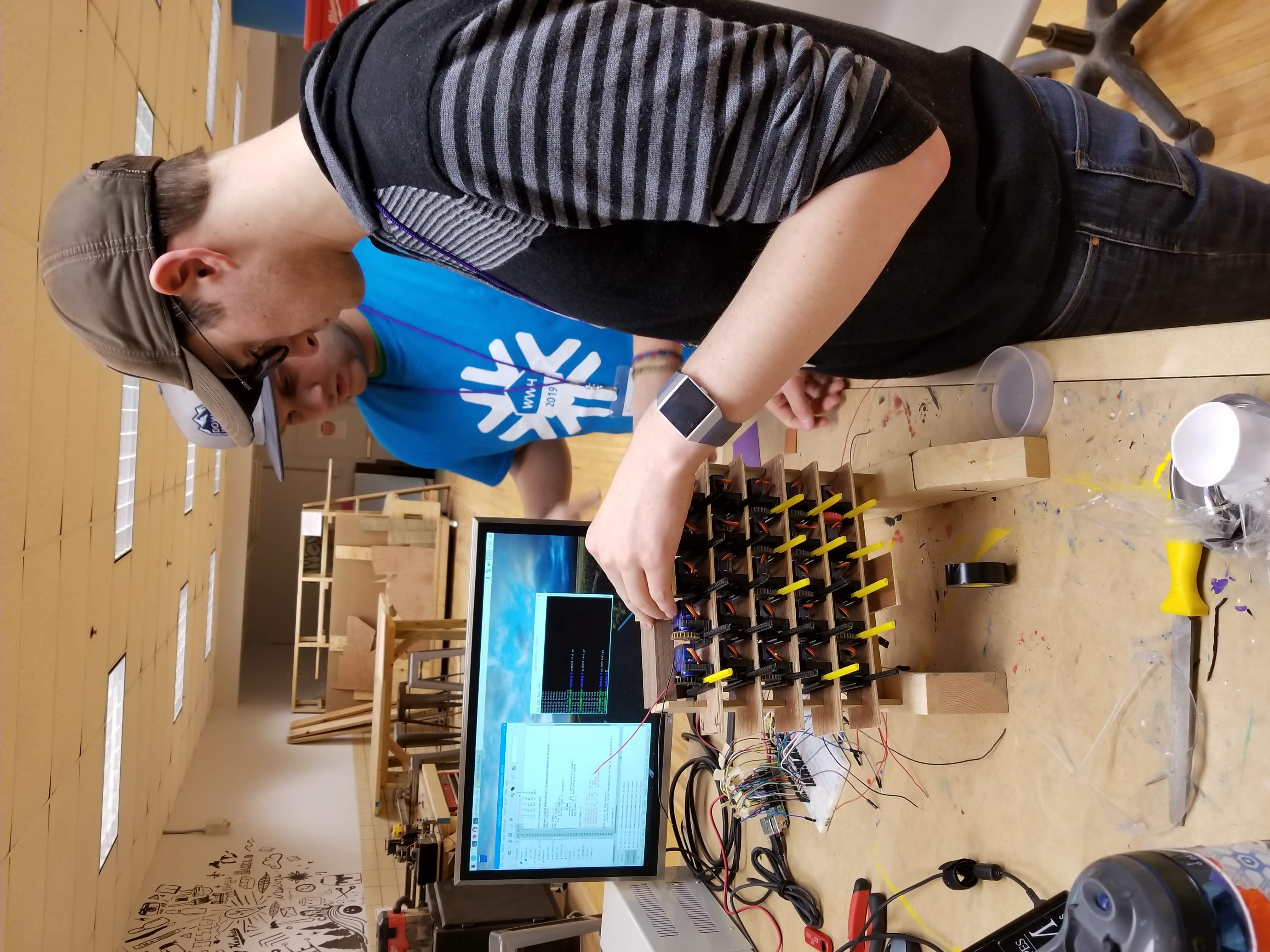
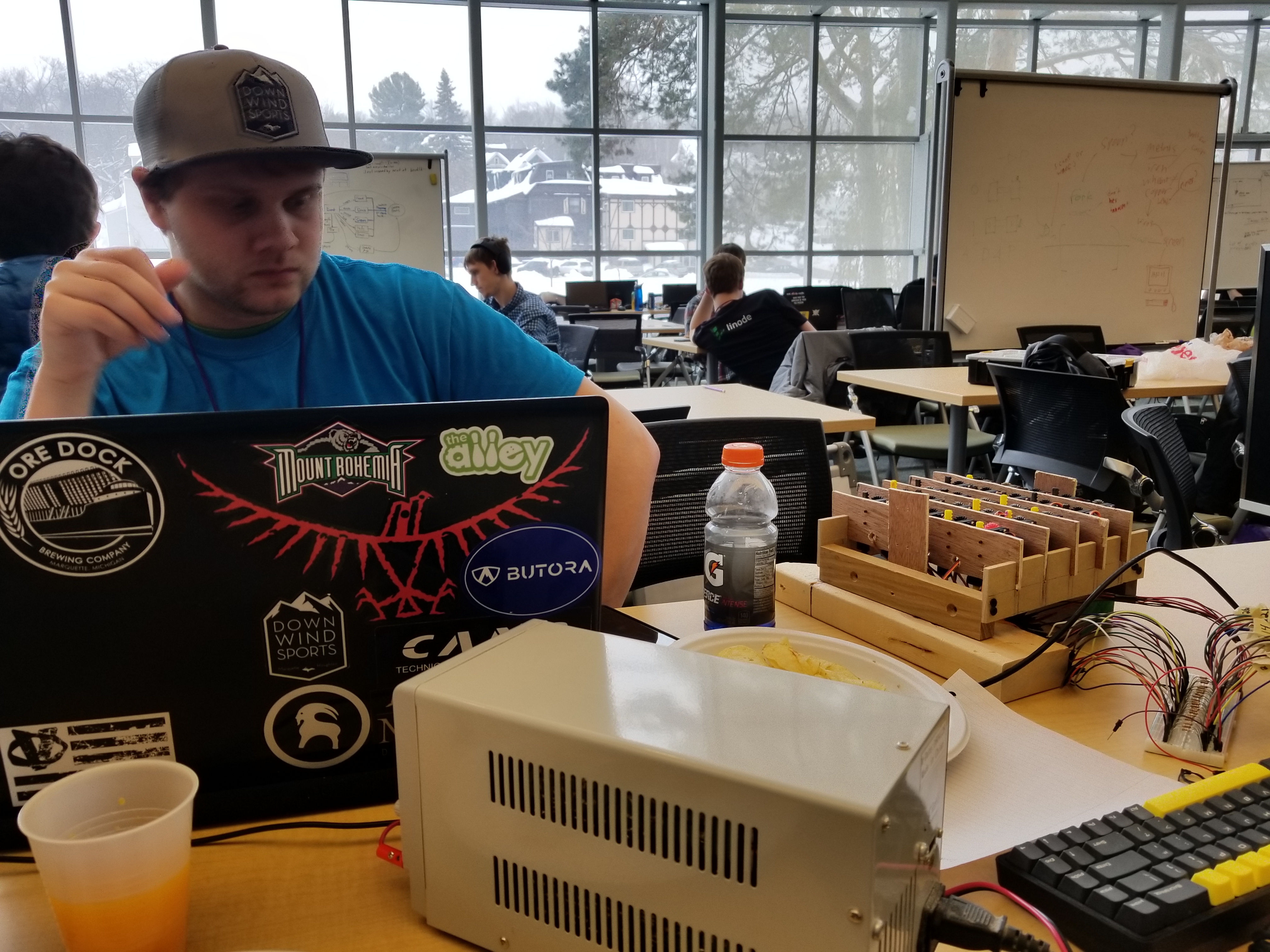
Debugging the servo bed
-
Debugging the servo bed
-

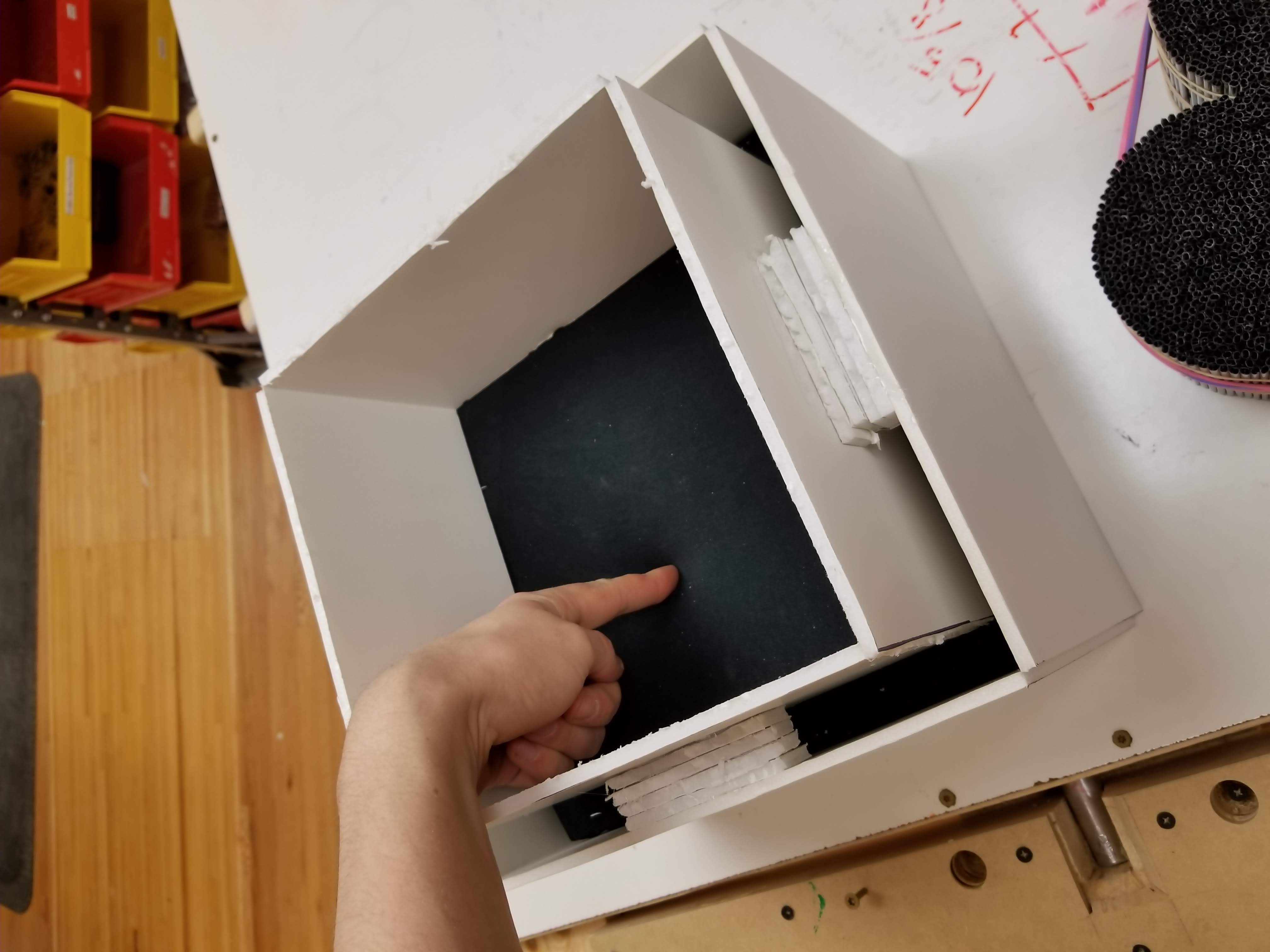
The spandex overlay enclosure
-

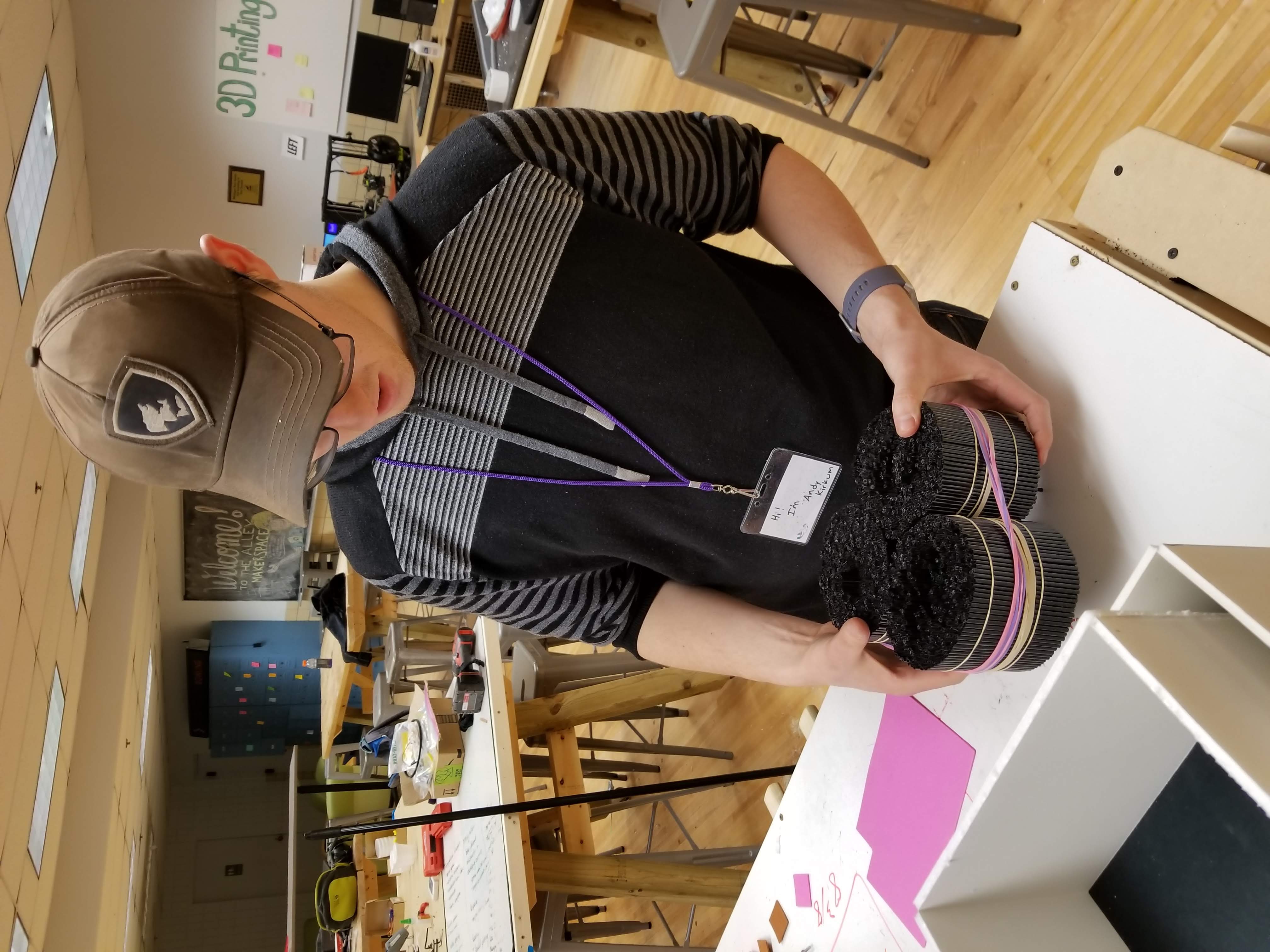
Cutting all of the stirrer straws in half
-

The bed of stirrer straws that gave the project its name





Inspiration
Our initial inspiration for this project's concept was simply from my desire to better visualize hiking routes in the Keweenaw. One of my friends works with GIS data frequently, but he and I found it difficult to quickly visualize maps on the computer screen. My team's solution to this was "Stir Crazy."
What it does
With the input of a topographic map in Bitmap format, this project interprets and displays this information in 3-dimensional space, making it easier for the user to understand what they are looking at.
How I built it
To build it, we utilized a Raspberry Pi, 25 micro servos, energy drinks, miscellaneous materials in the Alley Makerspace...and 5000 straws. We started with 3D printing servo rack gears, spur gears, and frames, and cutting out wooden frame sections on the X-Carve. Once we were done with printing, we were able to assemble the linear actuator modules (25 of them), and then put those in module groups of 5. We soldered the ground and powers together for each set of 5 and connected the signal wires once the modules were on the frame. We then wired the servos to a breadboard, and connected those to the I/O ports on the Raspberry Pi.
Once we had the overall servo grid built and wired, we could start debugging. When finished, we glued pieces of foam to the ends of the linear actuators, and stretched and hot glued spandex over that. This acts as our bed for the display. to better show the resolution and hide the hot glue, we cut up over 2500 coffee stirring straws (thus the name "stir crazy", and stood those up vertically to produce a moving 3-dimensional display.
Challenges I ran into
Our two biggest issues were with 3D printing and current overdraw. We had an issue with printing where one item would print, but if we did a batch of items then the pieces would curl up and get destroyed. This was the source of a lot of time waste. Additionally, we found that we could not run all of our servos at one time because they simply draw too much current for how they are wired. Additional challenges to overcome were wire management for so many servos, and we learning Python and new libraries for this application, which was not easy.
Accomplishments that I'm proud of
We are proud of simply completing the project on time and our dedication to stay awake for 26 hours and complete this. We are also proud of our ability to quickly prototype ideas and see what what works, and then implement a plan to follow. Also, we are proud of the idea of using the stirrer straws for the terrain.
What I learned
In the future, we will experiment with batch 3D printing more beforehand so that we don't run into big issues later. Also, we would have brought more wires. If we wired each servo individually with its own power and ground or used a lower gauge wire, that would solve the issue of current overdraw.
What's next for Stir Crazy
We need to develop a more modular version of this where we have a better ability maintain the servos and apply maintenance after the spandex has been glued. However, most of all, we need to incorporate more servos to form a much higher resolution. This is crucial to producing the most precise terrain data possible. The scaling up of the project would also result in a custom designed PCB to help with limited GPIO pins on the raspberry pi.
Built With
- foam
- numpy
- python
- raspberry-pi
- scikit
- servos
- straws
- wood




Log in or sign up for Devpost to join the conversation.