-
Stereo Visual Odometry
-

Stereo Visual Odometry


What it does
This project solves problems encountered by GPS-denied status using computer vision algorithms.
How we built it
We used OpenCV and Python.
Challenges we ran into
Documentation was hard to find.
Accomplishments that we're proud of
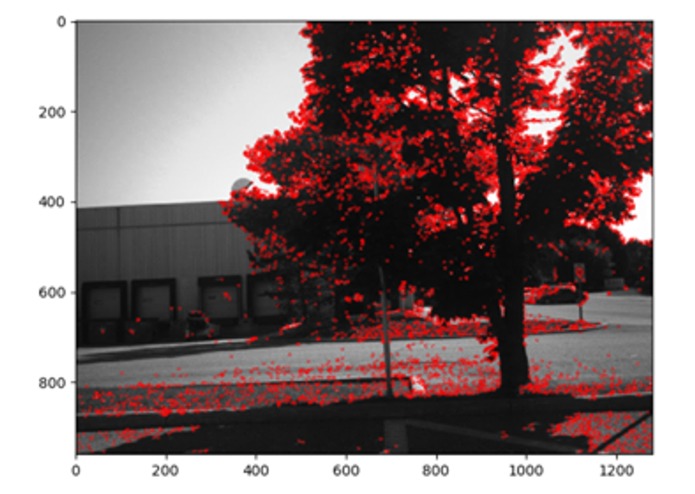
We were able to identify and match the similarities between the image datasets.
What's next for Stereo Visual Odometry for GPS-Denied Environments
Implement algorithm to all datasets.



Log in or sign up for Devpost to join the conversation.