
Inspiration
We were all fascinated by exoskeletal arms and prosthetics, and were looking to innovate in this space. We thought that one issue with all active prosthetics is that they require an external source of energy. This separates the prosthetic from the user - it is not a part of them, but some electronic that requires a charging. We wanted to make a prosthetic that, rather than being powered by something external, was charged by yourself - a self-powered arm.
What it does
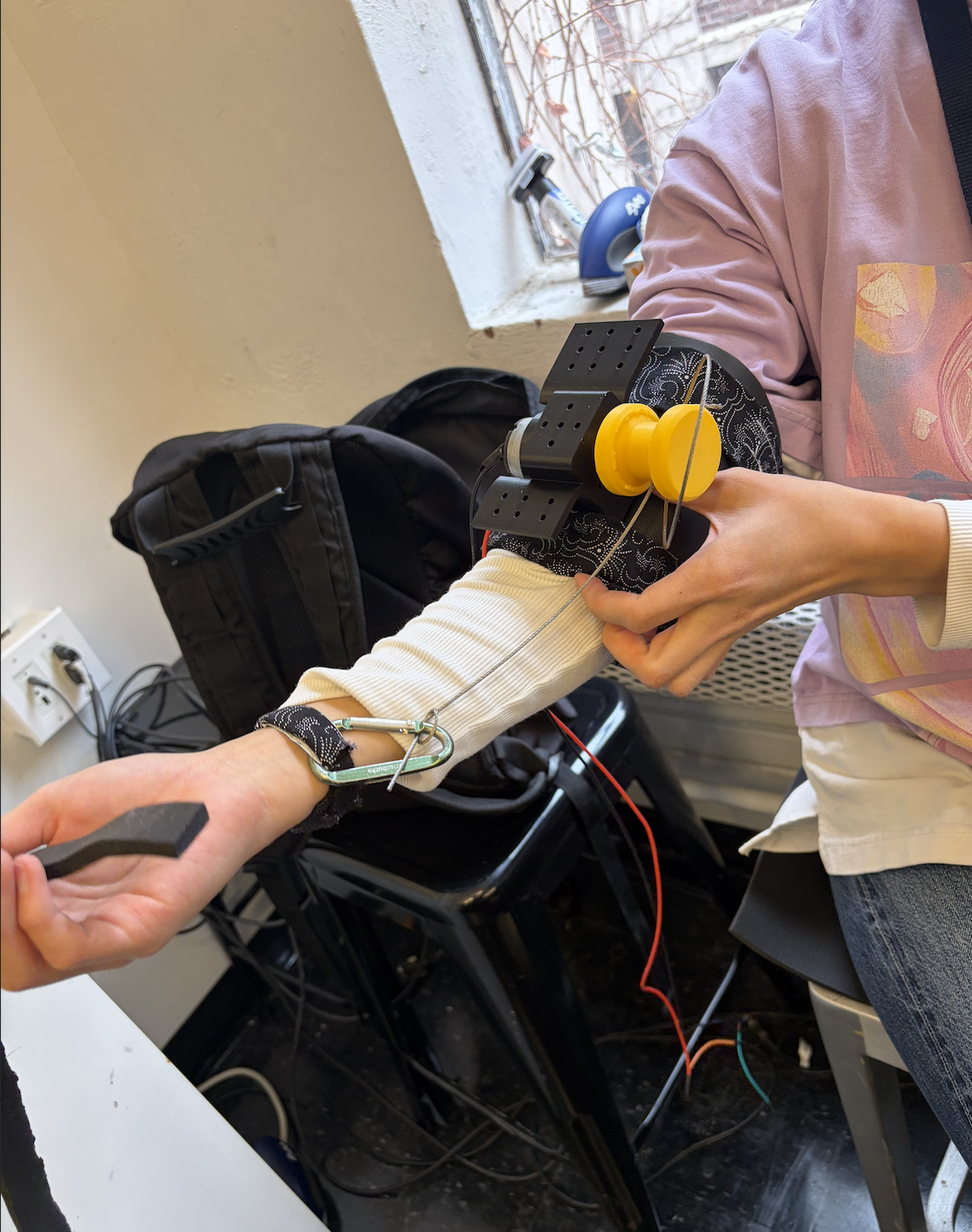
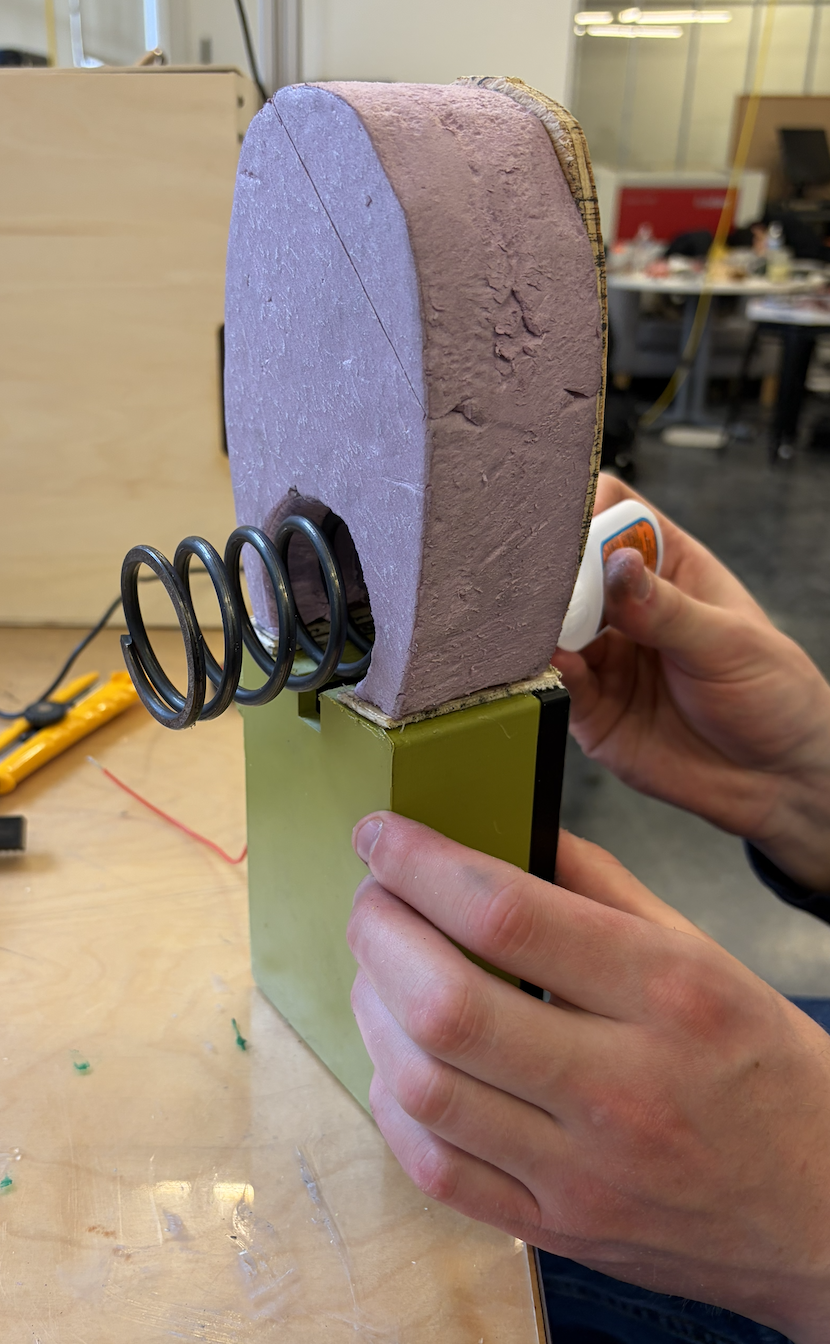
We have a custom, energy harvesting shoe that has a very stiff spring. With each step, you compress the spring, which spins a series of gears that spin a generator. We harvest this energy and store it in a LiPo battery. We then use this charged battery to spin a motor that winds a pulley on your arm, helping you lift heavy objects.
How we built it
We mixed several fabrication methods to create our project. We have a few components: we have a frame for a shoe that pushes down a spring, a gearbox that contains electronics and gears that convert the spring energy into electrical energy, and a few mounts on the arm that hold our pulley system. The frame was made using a mix of foam and wood; the gearbox was 3D printed, and our arm mounts were sewed for a more comfortable fit.
Challenges we ran into
We found this to be an ambitious project because it involved a series of design challenges. None of us have made something like this before, so we couldn't follow a formula or recipe: we had to develop a new, custom design, and this took a lot of time. As a result, we had less time to fabricate and integrate, leading to challenges in electronics and assembly.
Accomplishments that we're proud of
We are proud of our design. We think it makes a lot of sense and has very real real-world applications. We
What we learned
What's next for StepPower
todo
Built With
- lathe

Log in or sign up for Devpost to join the conversation.