Inspiration
We were inspired from the crewmates from a game we once all played. We wanted to make a robot that was able to dispense things and become a sort of comfort companion for astronauts in space.
What it does
The robot will follow its human companion around while carrying selective storage around where the human can control the selection fully. A panic button is implemented inside the robot in case the human is unresponsive in space.
How we built it
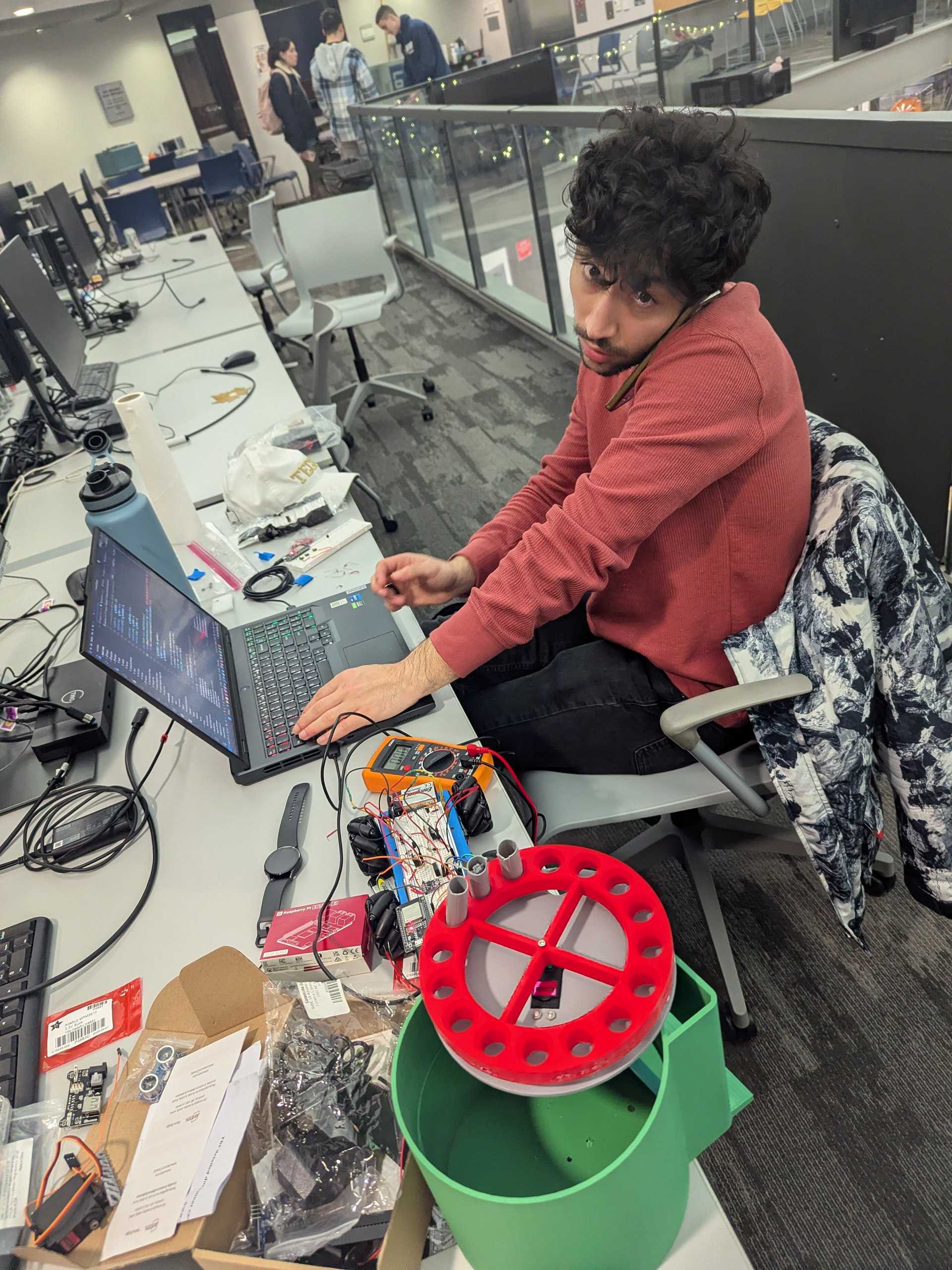
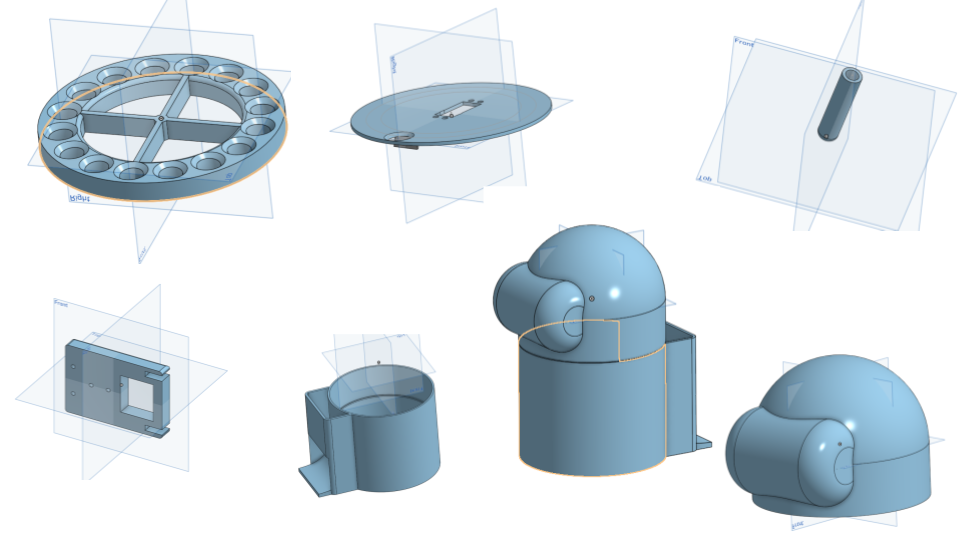
Built it using onshape, 3D printing, kicad pcb design, breadboarding, fast prototyping and team collaboration
Challenges we ran into
The challenges we faced in this project included a competitive inventory in which we were unable to obtain some crucial components and some bad components that did not give us accurate data for the robot.
Accomplishments that we're proud of
We were able to implement the communication between two esp32's and attempt to implement an automotive following tool. The team was also able to completely design from the ground up the whole body, dispenser design and shell of the robot.
What we learned
We learned that next time we should prepare more of what items to get and have a more solid idea of the implementation of our thoughts to reality.
What's next for Steal The Moon Automatic Storage Unit/Helper
We want to try and add computer vision to detect the intent behind peoples action so that robot can try and product what the human needs.
Built With
- c++
- kicad
- onshape
- pip





Log in or sign up for Devpost to join the conversation.