-
-
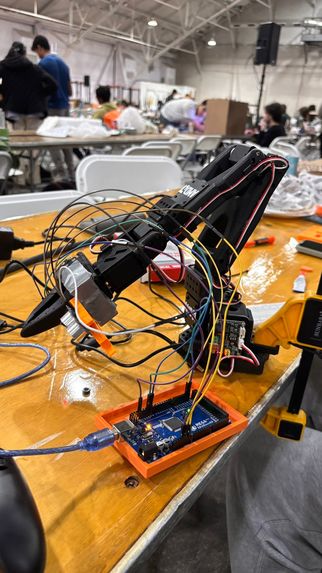
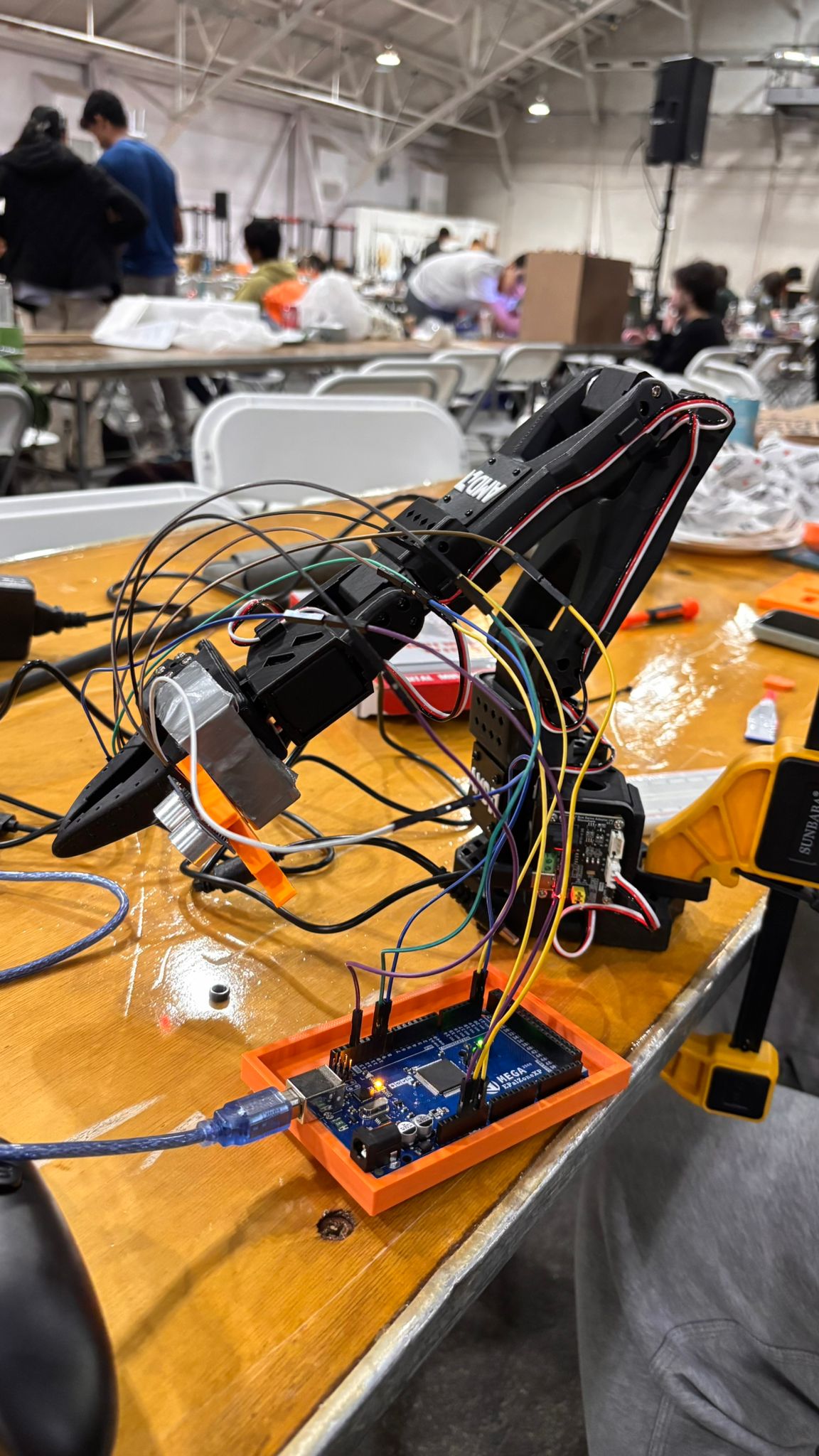
Arm assembly with wires connected
-

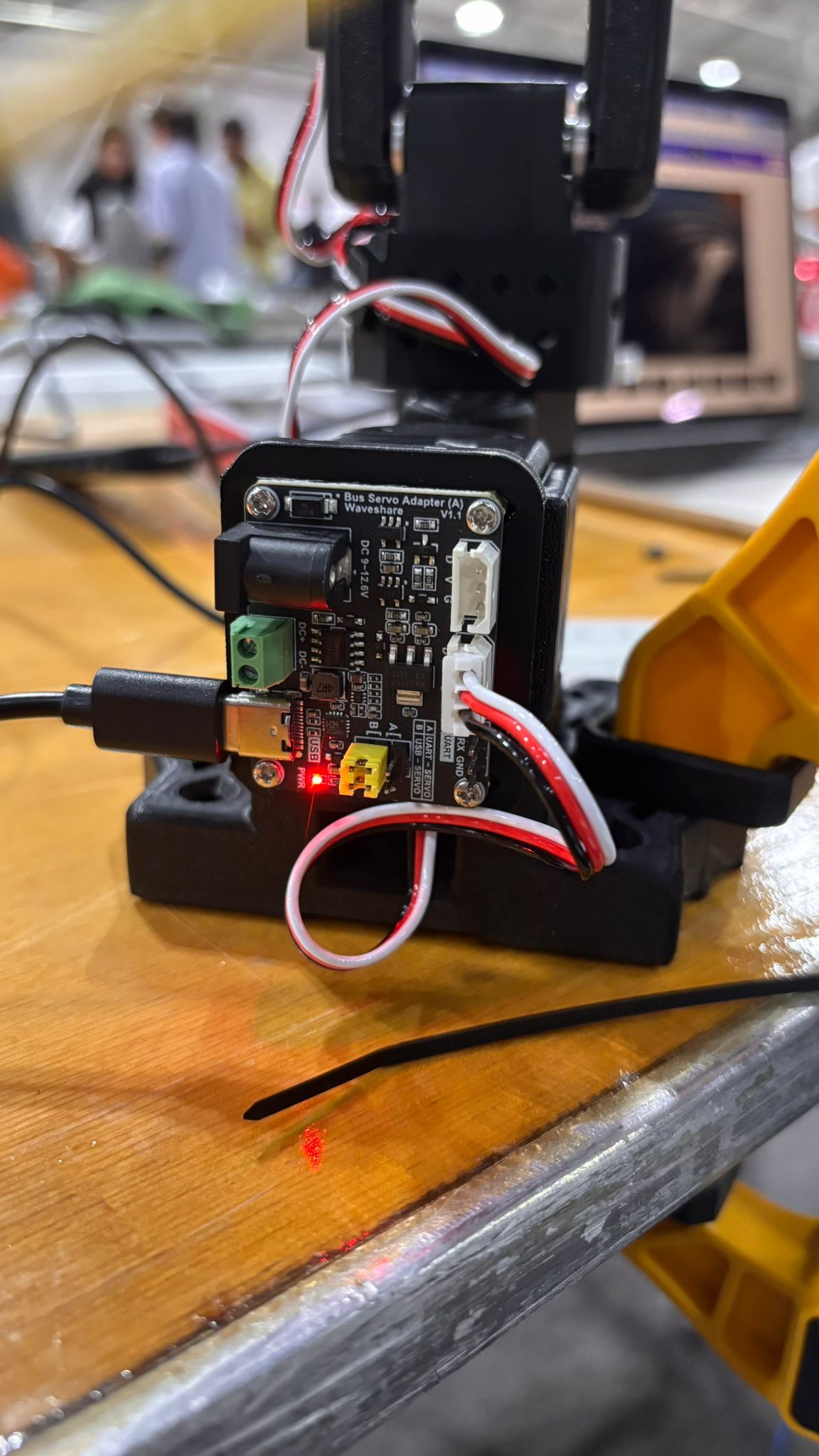
Wiring on back of arm
-

Head of claw with Ultrasonic sensor
-
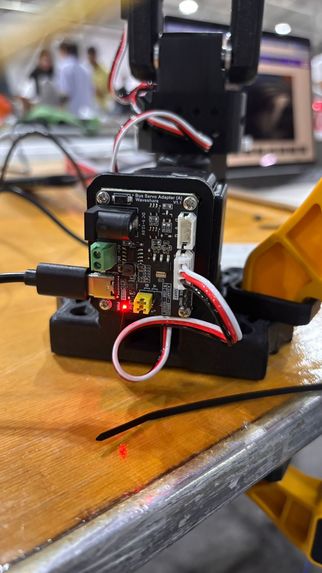
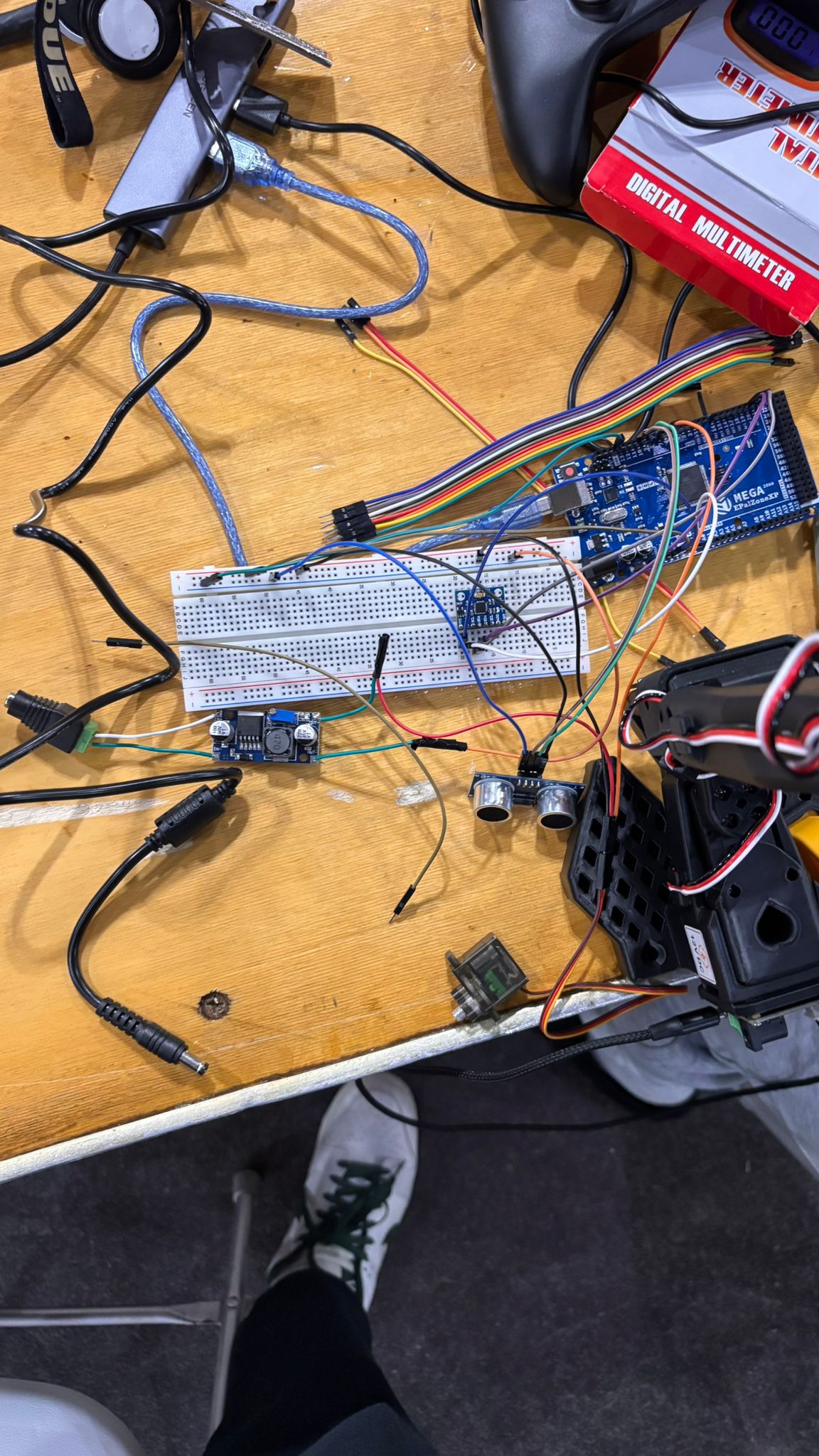
Arm servo controller
-

Initial Arm
-
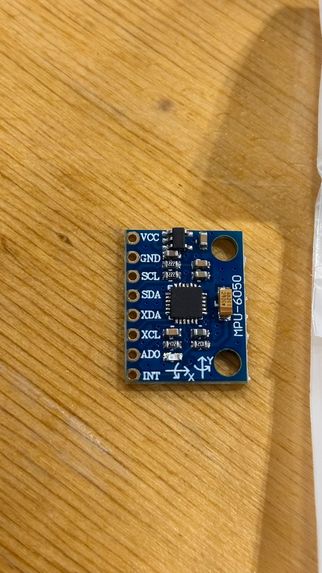
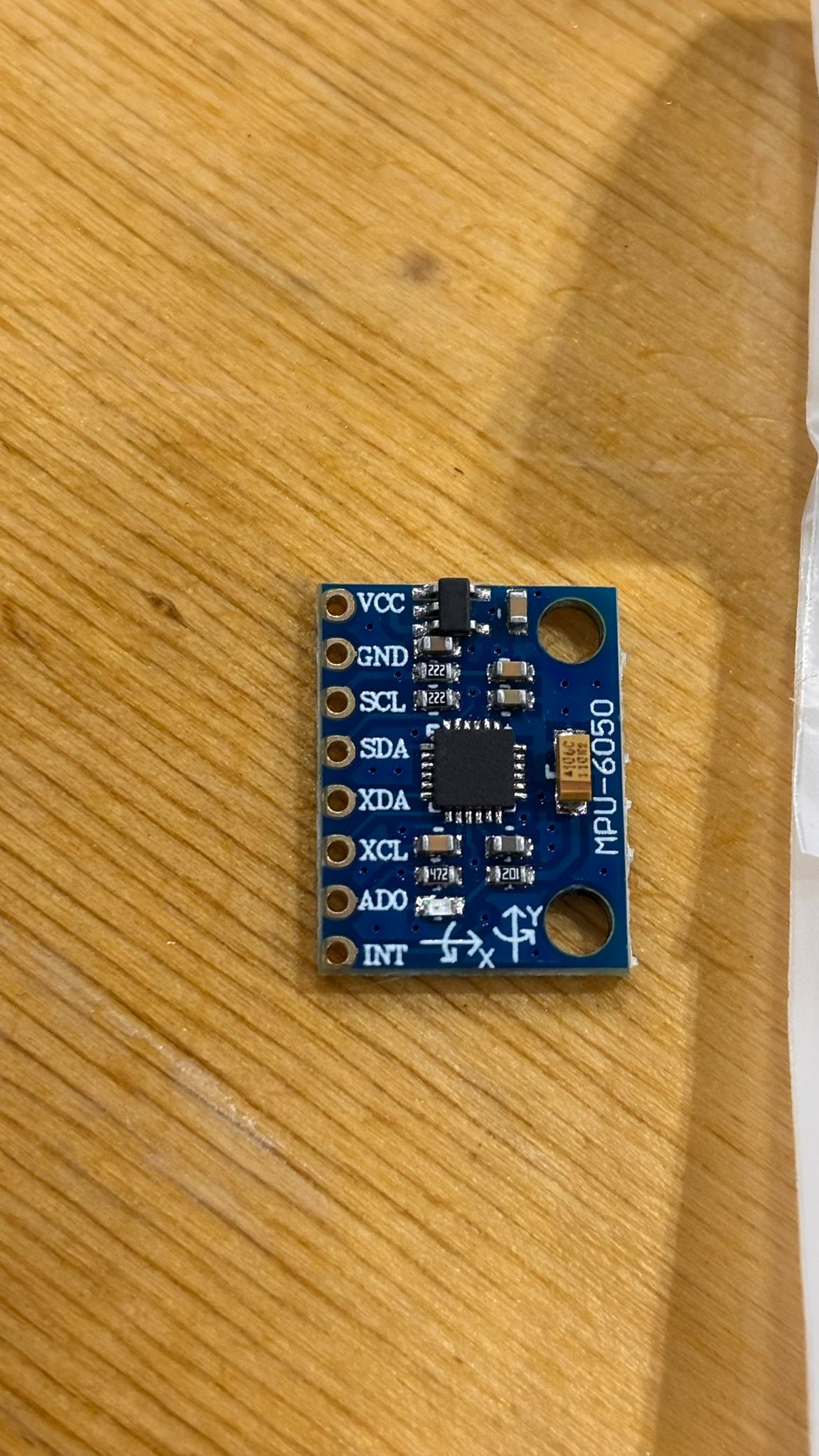
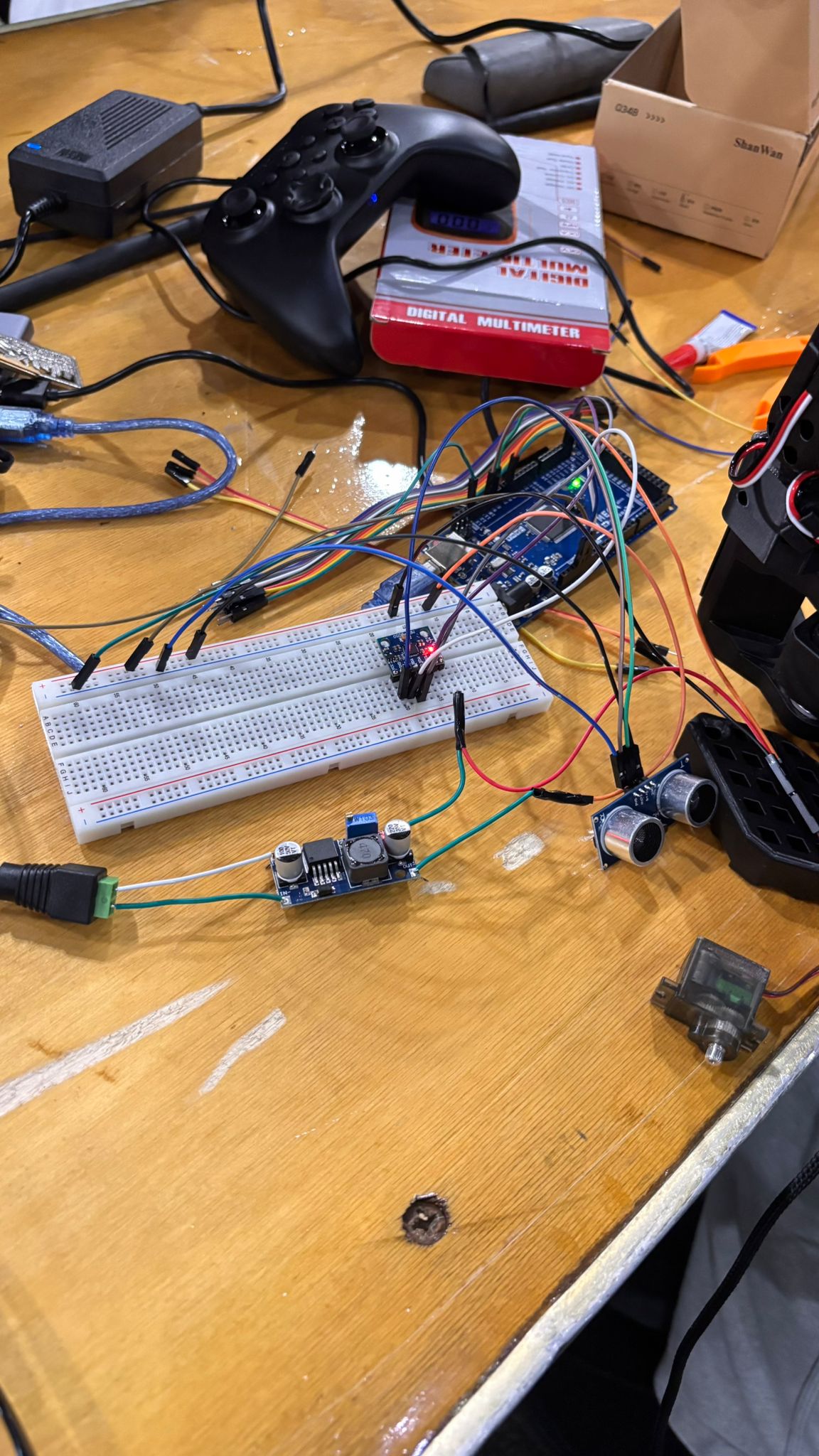
IMU Sensor
-
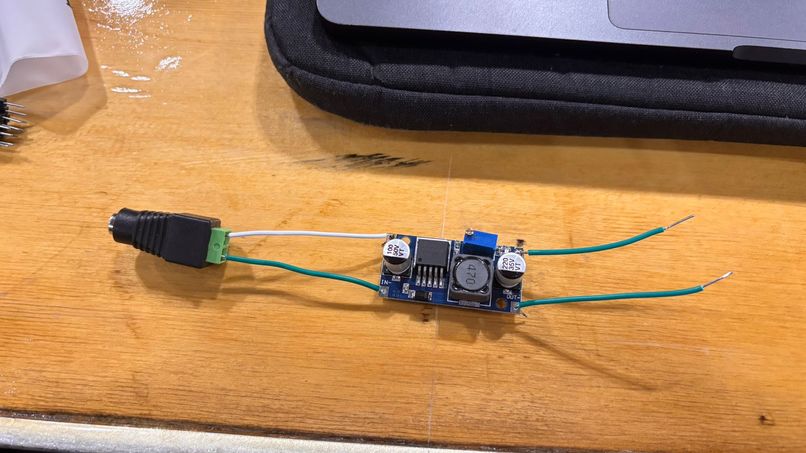
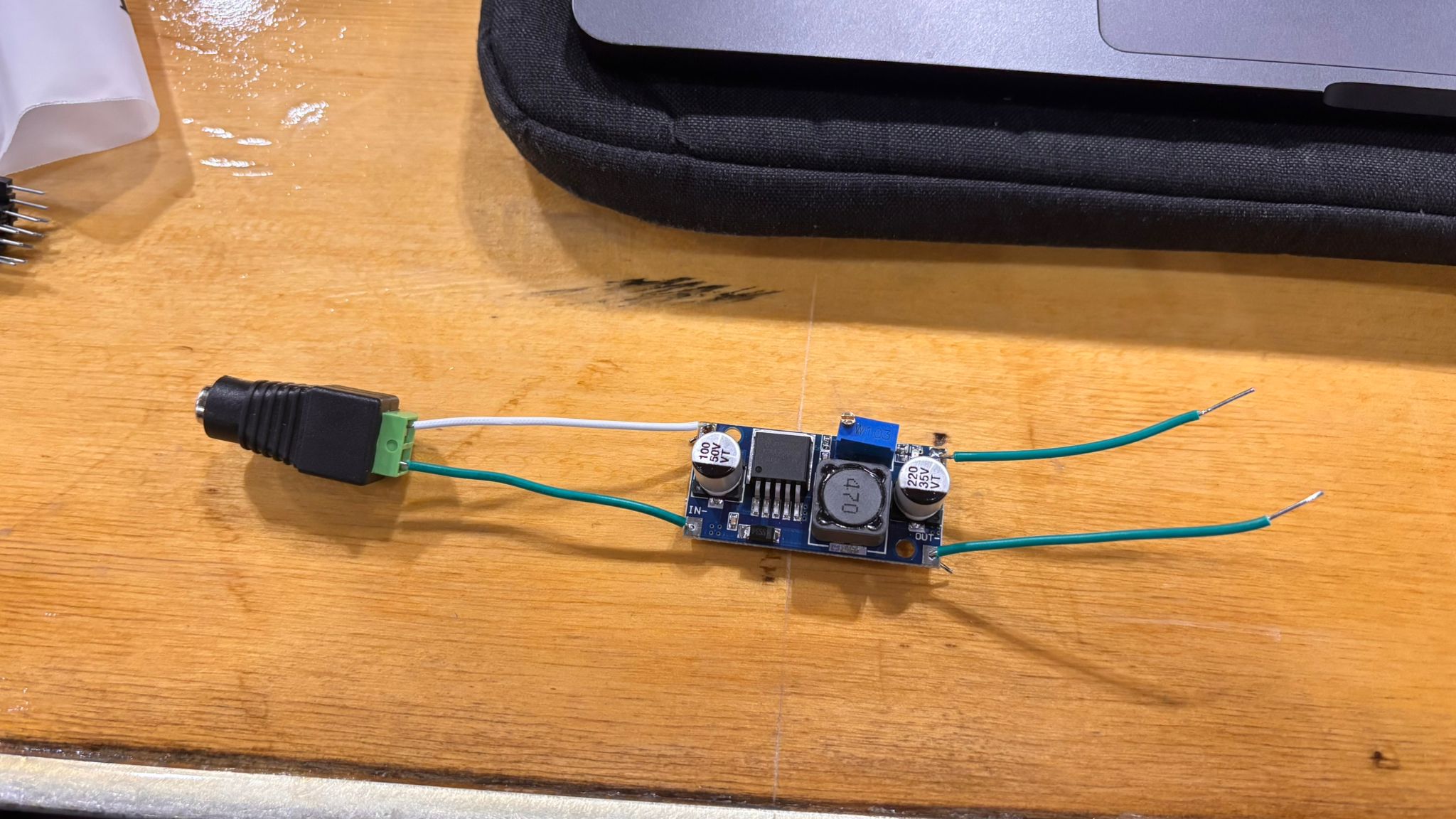
Wall Adapter with Buck Connector
-

-
-
Calibration of sensors
-
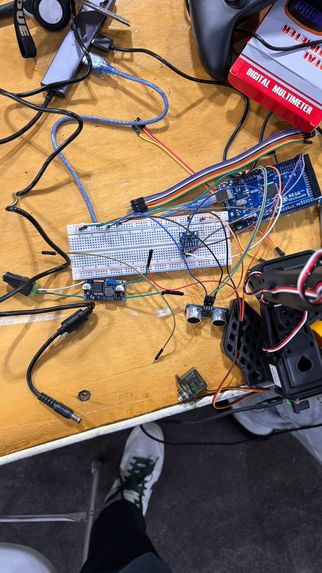
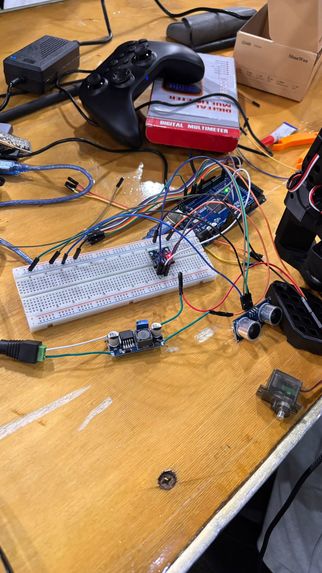
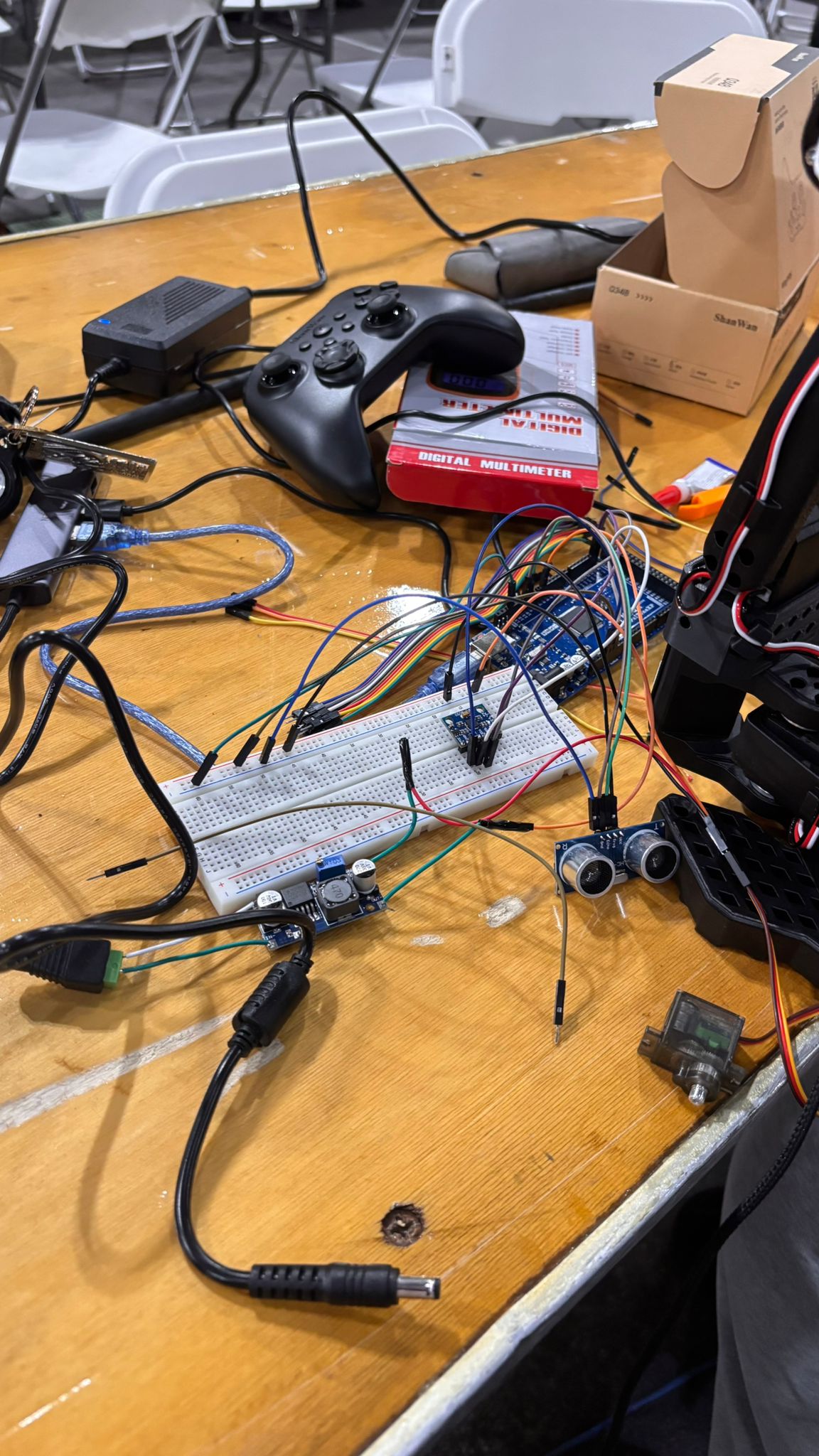
Breadboard with sensor add ons
-
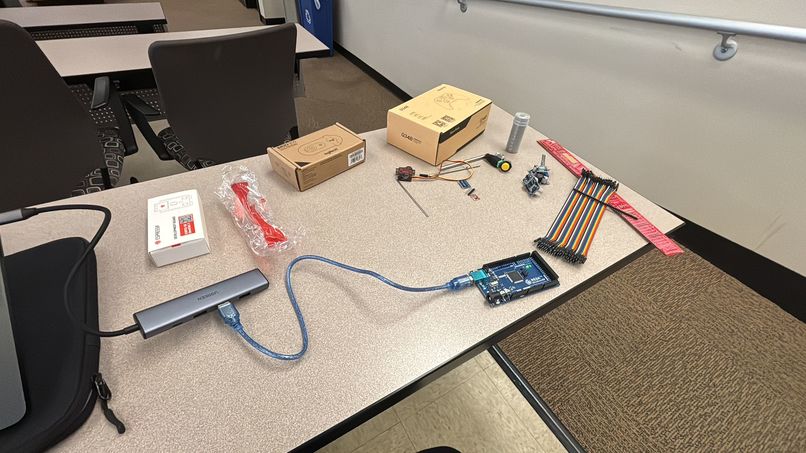
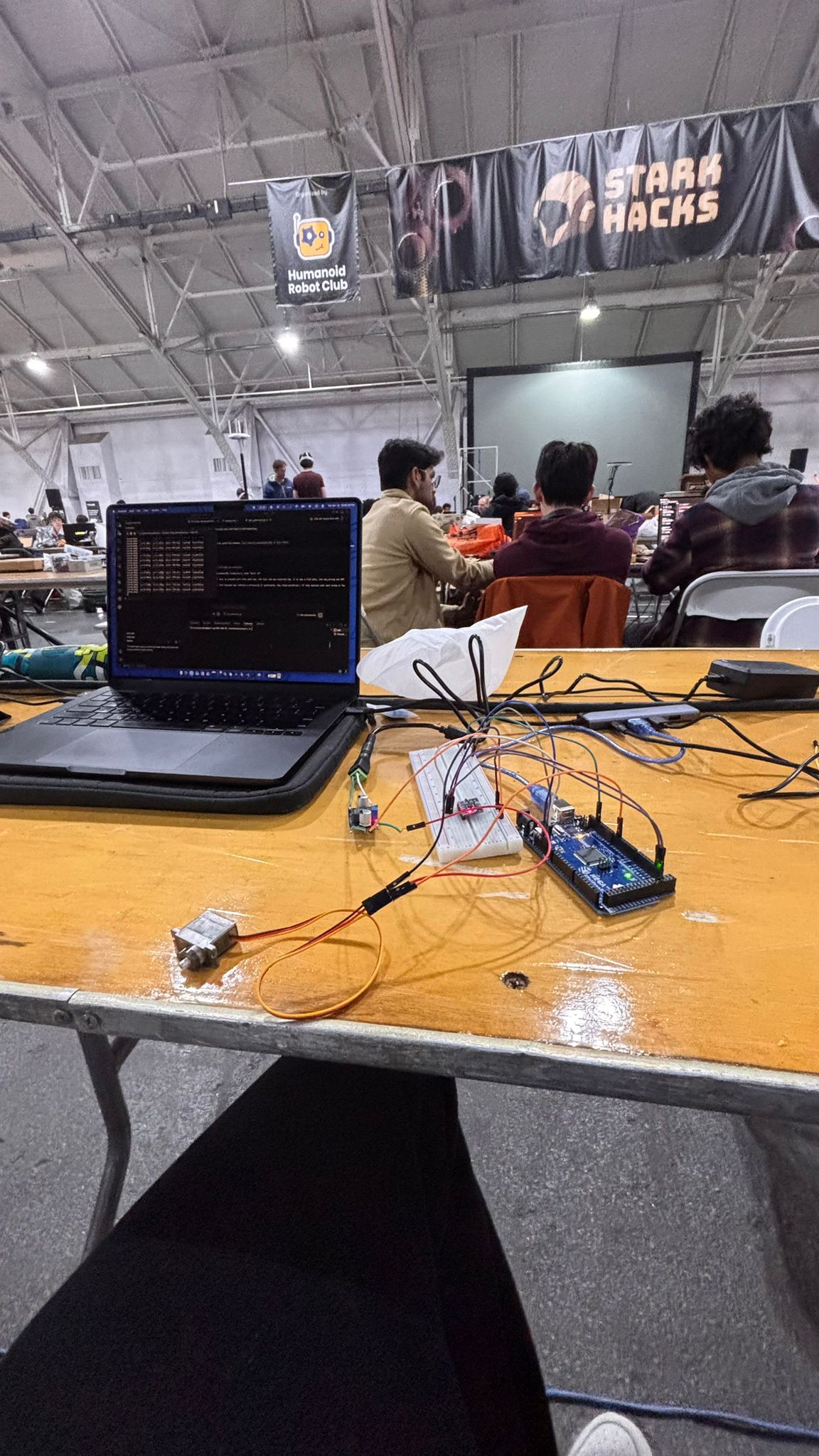
Beginning state of our project
-

Arm assembly




Inspiration
Robotic grasping is fundamental, yet most grippers rely on fixed force and lack real-time feedback. This leads to instability and dropped objects. We set out to build a system that can sense and react to slips as it happens.
What it does
We built a Smart Adaptive Gripper that detects instability using IMU data and automatically tightens in real time. It adds feedback to the gripping process, improving stability during manipulation.
How we built it
Hardware: Servo-driven gripper, MPU-6050 (IMU), ultrasonic sensor. Servo powered via buck converter (shared ground with Arduino Mega). Software: Rolling standard deviation on IMU data for slip detection. Python processes data and sends commands over serial to the Arduino. A live dashboard visualizes sensor data and slip events.
Challenges we ran into
- Power management and wiring stability between various modules and components
- Reliable serial communication between Python and Arduino
- Tuning IMU thresholds to detect slip without false positives
- Attachment of components to the main arm would often give errors in readings
- Working around a servo fault on our arm
- CAD designs were printed with unscaled dimensions, causing major setbacks. ## Accomplishments that we're proud of
- Working prototype with real-time slip detection and response
- Automatic grip correction during disturbance
- Integrated sensing, control, and live visualization
- Completed and demo-ready within a limited time ## What we learned
- Practical hardware integration and power design
- Real-time sensor processing and control loops
- Importance of feedback in robotic manipulation Rapid prototyping under constraints ## What's next for Starvis We plan to improve robustness and expand sensing. This approach can scale to industrial and assistive robotics, enabling more reliable manipulation. We also plan to construct various attachments


Log in or sign up for Devpost to join the conversation.