-
-
testing
Inspiration
Our team captain Abdel had a vision of building a drone tracking system, which inspired us to take on the drone challenge. We wanted to explore how computer vision and control systems could work together to detect, track, and interact with drones in real time.
What it does
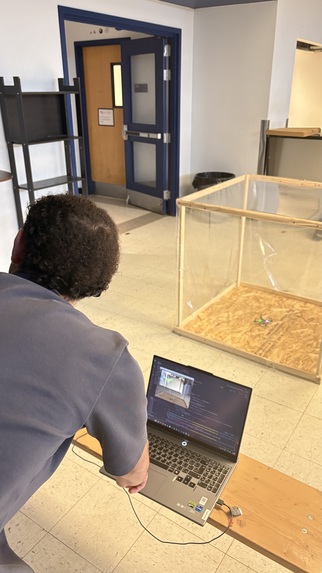
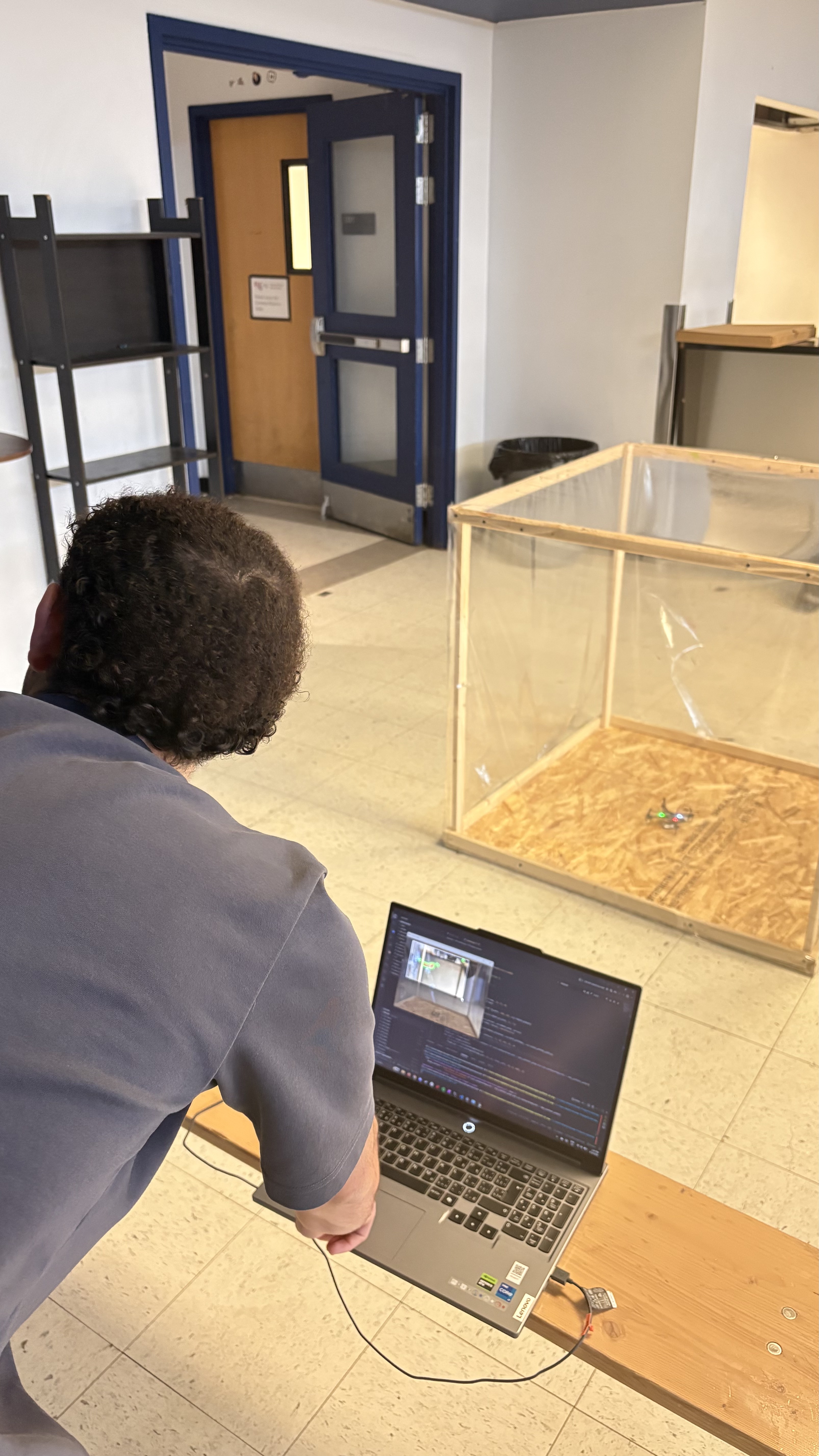
Stable Tuna Can is a drone control and tracking project that enables stable drone flight while allowing dynamic movement and quick responses. The system also includes an emergency stop feature to ensure safety during operation.
How we built it
We built the project using Python and OpenCV for drone detection and tracking, combined with a control system that sends flight commands to the drone. The system processes camera input, detects the drone’s position, and adjusts flight behavior accordingly while maintaining stability.
Challenges we ran into
One of the biggest challenges was achieving reliable drone detection without confusing the drone with other objects in the environment. We also faced latency between detection and control commands, requiring careful tuning to keep the drone stable.
Accomplishments that we're proud of
We successfully built a working system that can detect and track a drone while maintaining controlled flight. Integrating computer vision with real-time drone control within a short development time was a major achievement for our team.
What we learned
We learned a lot about real-time computer vision, drone control systems, and the challenges of integrating hardware with software. The project also taught us the importance of fast iteration, teamwork, and debugging under time pressure.
What's next for Stable Tuna Can
To the space! 🚀


Log in or sign up for Devpost to join the conversation.