-
-
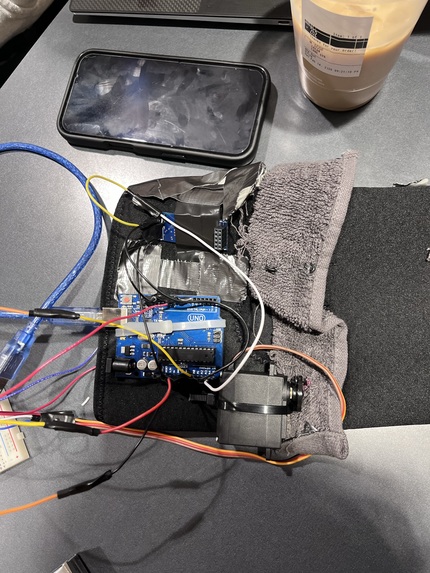
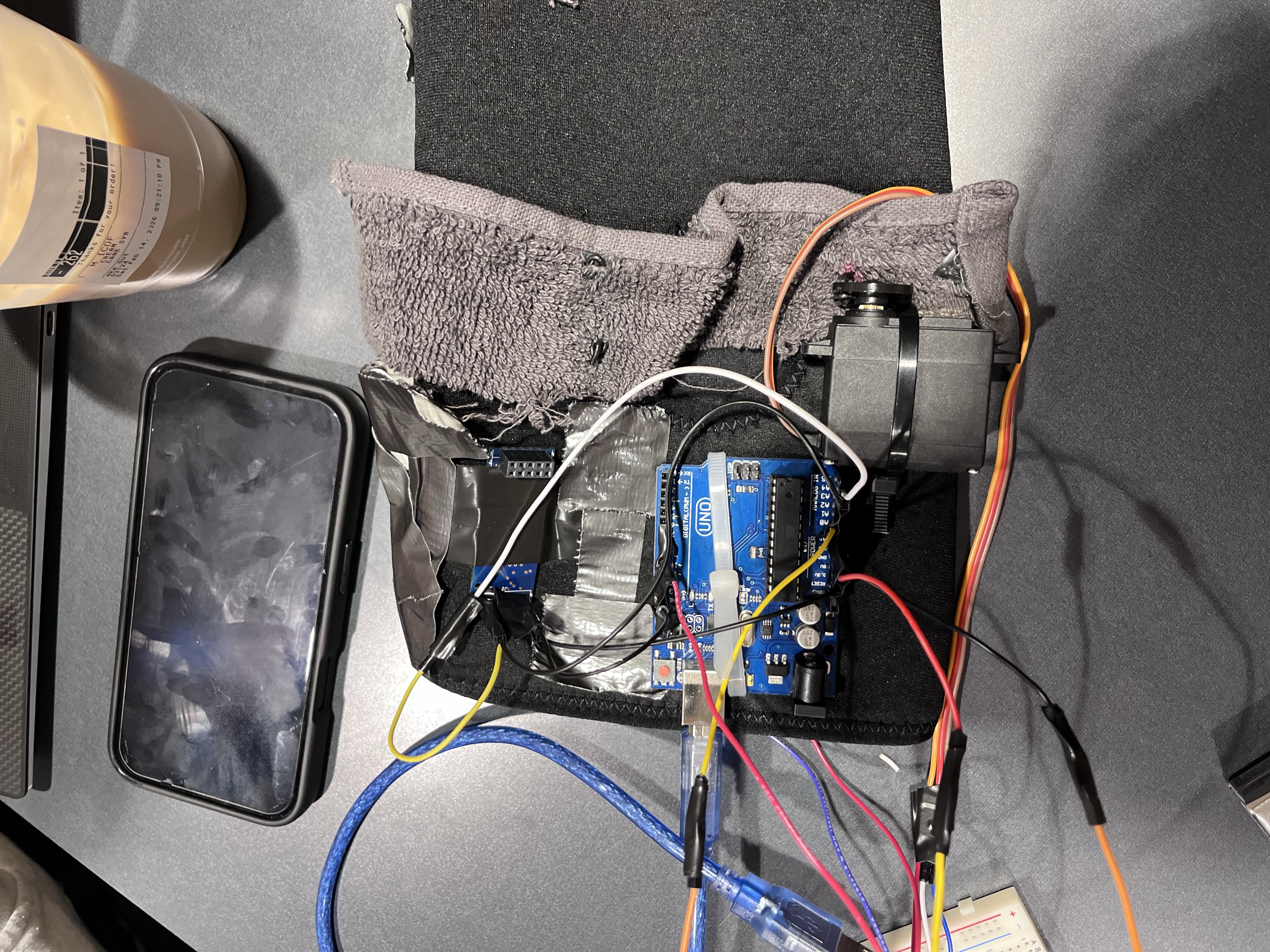
the brace
-

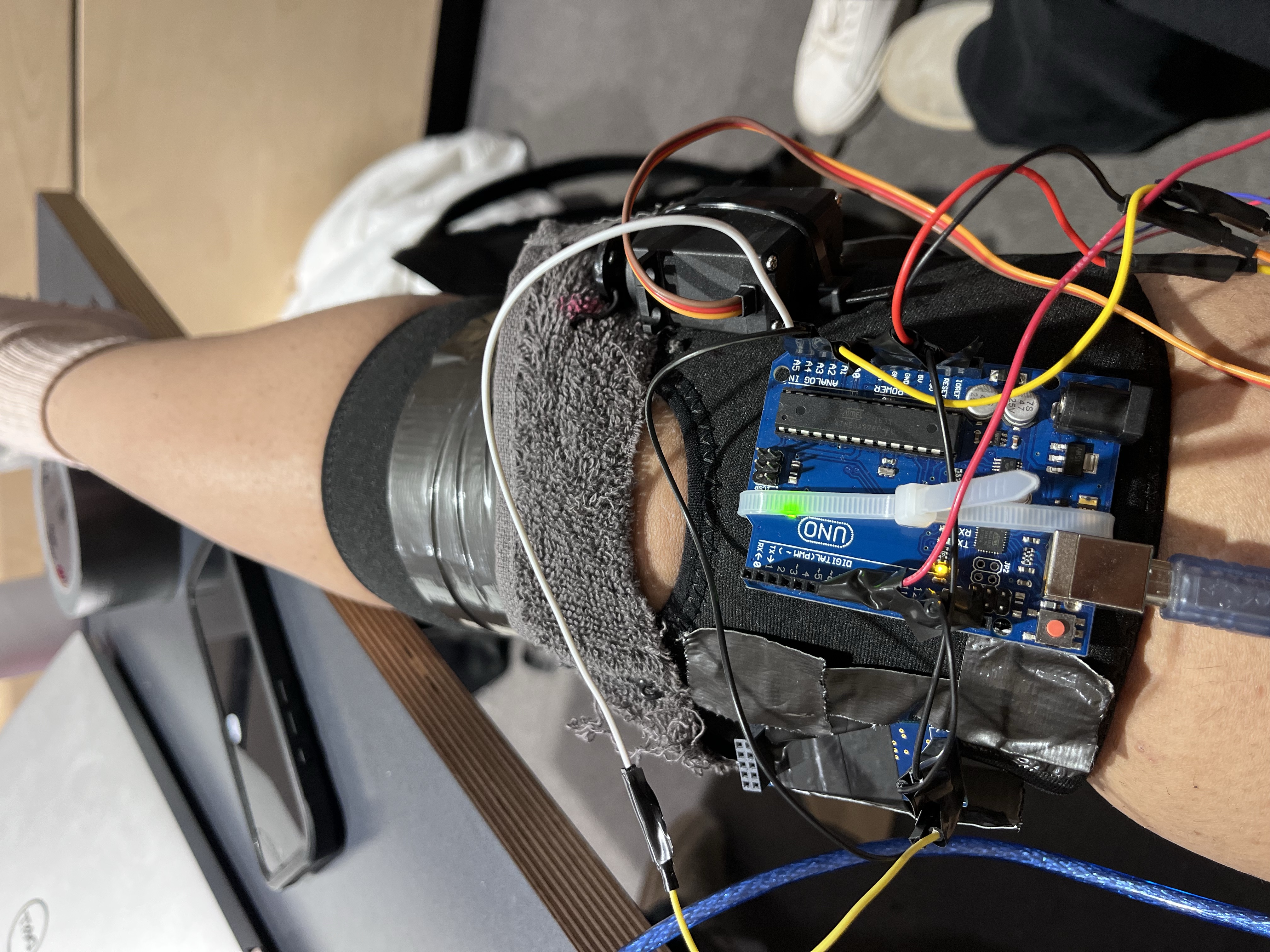
on the person
-
Inspiration
In high-risk moments, survival depends on the body’s ability to stay upright and mobile. We’ve seen friends and teammates suffer knee injuries that instantly removed their ability to stand, escape danger, or even protect themselves, turning a single misstep into a survival-limiting event. Most knee injuries happen in a split second, faster than the human brain can react. Current braces on the market are passive, meaning they are just tight sleeves that provide support after the damage is done. Therefore, we wanted to build a solution that doesn't just sit there, it detects dangerous movements within the individual's knee and intervenes physically before a dislocation occurs.
What it does
Active Motion Monitoring: Uses high-frequency sensor data with a dataset of specific individuals fed to the device to track knee orientation in real-time.
Prevent the Tragedy: When the system identifies a pre-dislocation torque pattern, it triggers an instant mechanical response to stabilize the joint by applying counter pressure.
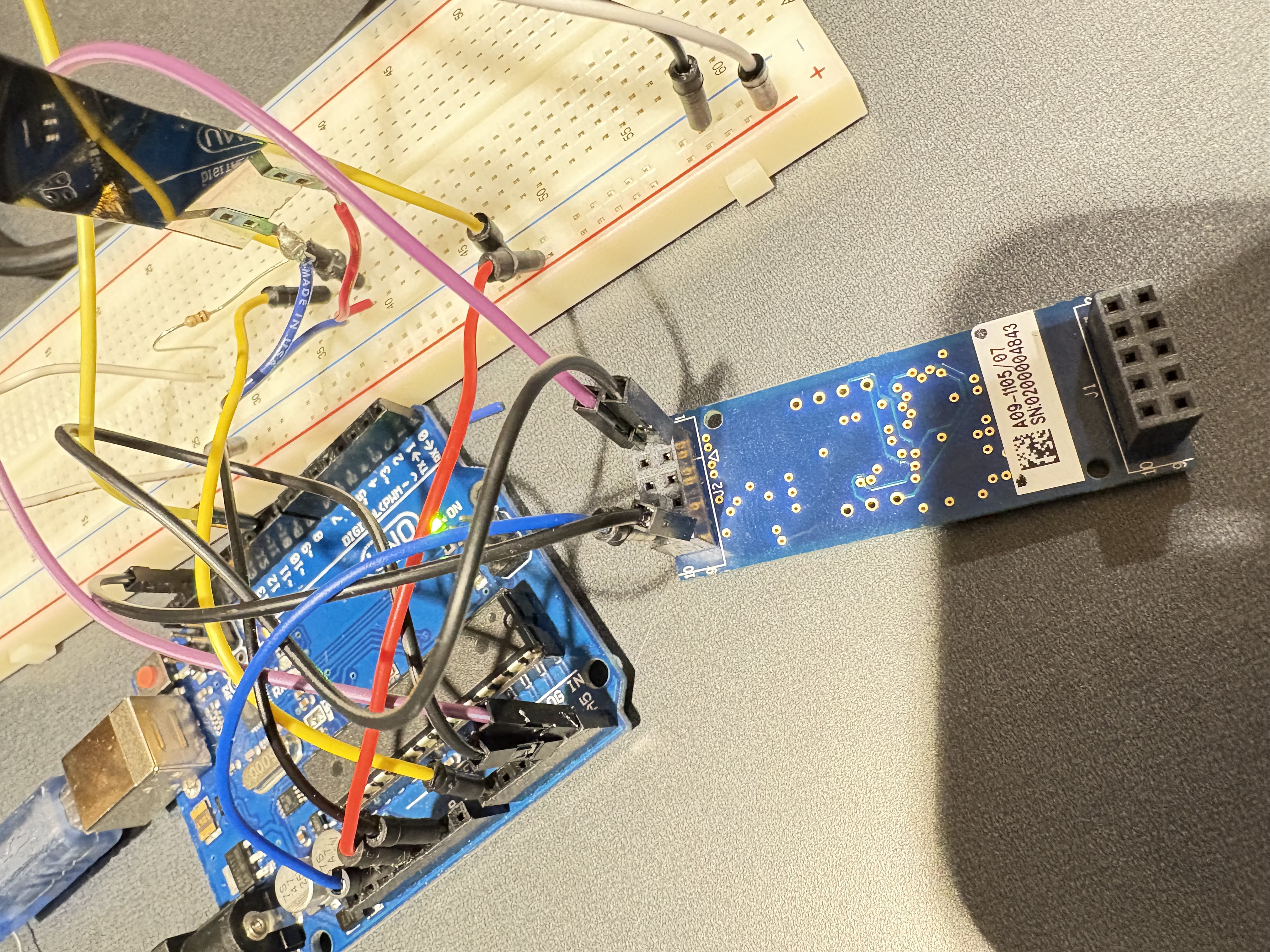
How we built it
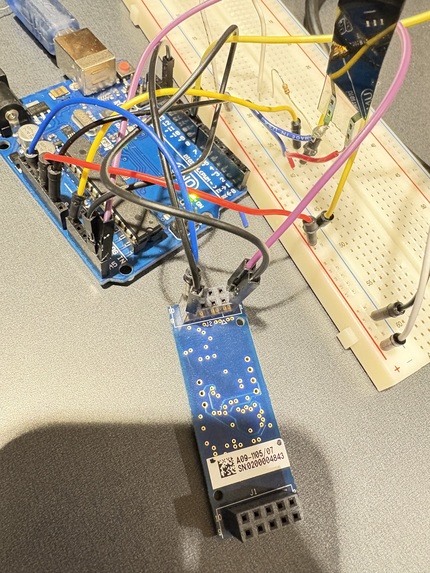
This product is based on an Arduino R3 acting as our high-speed processing hub. To map the knee’s movement, we integrated a 3-axis Gyroscope to track rotation/sudden movements and Flex Sensors to monitor the literal bend of the joint. We then added a High-Torque Servo Motor, transforming the brace from a simple sleeve into a mechanical system. We programmed this system using C++ that processes sensor data in real-time. Instead of a basic on/off switch, we used custom datasets to calibrate the brace for the individual users. By analyzing the speed and angle of the knee’s movement, our code identifies the times when the pressure should be applied to avoid the moments when dislocation is likely to happen.
Challenges we ran into
Hardware: Working with older Arduino components meant limited documentation. We spent hours debugging communication errors and fine-tuning elements such as the protocols to get a stable connection between the R3 and the gyroscope. Voltage Distribution: We found that our power source of a standard 9V battery couldn't handle the high current draw of the servo motor. This led to the system not operating, forcing us to pivot to a laptop power source. Data Fragmentation: Our initial test data was scattered and unorganized, making it difficult to set clear safety thresholds. Distinguishing between a "fast run" and a "bad twist" was nearly impossible with messy raw entries. Refining Calibration: To fix the data mess, we conducted our own physical stress tests. By feeding the system this raw data and averaging the results, we successfully created a reliable baseline for the brace to trigger only during real danger.
Accomplishments that we're proud of
Built a functional stabilization device prototype
- We designed and assembled a working hardware system that actively detects instability and applies corrective force in real time. Achieved real-time motion detection and response
- Created an Arduino-based processing system which analyzes high-frequency sensor data and triggers the mechanism within milliseconds.
What we learned
Mechanical response matching biomechanical aspects
- It wasn’t enough for the servo to activate, it had to apply force at the precise phase of motion where instability begins, which required analyzing angular velocity patterns rather than just position.
Torque capability is meaningless without control precision
- Increasing servo strength alone made the brace unstable and uncomfortable; we learned that controlled force application is more important than raw power.
What's next for StabiliKnee
Optimize the hardware design
- Our next step is to reduce the size and power consumption of the product to make the system fully portable and practical for everyday use.
Expand real-world testing
- We want to test StabiliKnee in diverse real-life scenarios to gather practical data, and improve robustness, to enhance its performance under unpredictable conditions
Expand to Knee Ligaments
- Considering how this product was intended for the knee joint, we can potentially integrate this idea into assisting with other ligaments as well.
Built With
- arduino
- breadboard
- imu
- unor3

Log in or sign up for Devpost to join the conversation.